

ТЕСТ
ПО «ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
для специальности «Управление и
информатика в технических системах»5 Вариантов по 15 вопросов
Указание: все задания имеют 4 варианта ответа, из которых правильный только один. Номер выбранного ответа обведите кружочком в бланке для ответов.
Вариант 3.
1. Передаточная функция апериодического звена 1-го порядка.
1)
![]() 2)
2)![]() 3)
3)![]() 4)
4)![]()
2. Понятие времени регулирования системы.
1)
Время регулирования
![]() – это время, в течении которого начиная
с момента приложения воздействия на
систему отклонение регулируемой величины
– это время, в течении которого начиная
с момента приложения воздействия на
систему отклонение регулируемой величины![]() от
ее установившегося значения
от
ее установившегося значения![]() будут
больше наперед заданного значения
будут
больше наперед заданного значения![]() .
.
2)
Время регулирования
![]() – время, за которое регулируемая величина
впервые достигает установившегося
значения.
– время, за которое регулируемая величина
впервые достигает установившегося
значения.
3) Время регулирования определяет быстродействие переходного процесса.
4)
Время регулирования
![]() – это время, в течении которого начиная
с момента приложения воздействия на
систему отклонение регулируемой величины
– это время, в течении которого начиная
с момента приложения воздействия на
систему отклонение регулируемой величины![]() от
ее установившегося значения
от
ее установившегося значения![]() будут
меньше наперед заданного значения
будут
меньше наперед заданного значения![]() .
.
3. Прямые оценки качества переходных процессов.
1)
1) Время регулирования
![]() .
.
2)
Перерегулирование
![]() .
.
3) Время достижения максимального значения.
4) Резонансная частота.
5) Частота среза.
6)
Полоса пропускания
![]() .
.
2)
![]() - интегральная оценка нулевого порядка;
- интегральная оценка нулевого порядка;
![]() -
интегральная оценка первого порядка;
-
интегральная оценка первого порядка;
……………………..
![]() -
интегральная оценка n-го
порядка.
-
интегральная оценка n-го
порядка.
3)
 1) заданное значение перерегулирования
1) заданное значение перерегулирования![]() ;
;
2)
заданное время регулирования
![]() ;
;
3)
заданный коэффициент передачи
![]() ;
;
4)
заданный порядок астатизма
![]() ;
;
5)
максимально допустимое ускорение
![]() управляемой координаты
управляемой координаты![]() .
.
4)
1) Время регулирования
![]() .
.
2)
Перерегулирование
![]() .
.
3) Время достижения максимального значения.
4.Понятие нелинейной статической характеристики.
1) Нелинейные звенья:
- с гладкой нелинейной характеристикой;
- с кусочно-линейной характеристикой (релейного типа, зононечувствительности, с насыщением);
- описываемые уравнениями, которые содержат произведение переменных или их производные и другие их комбинации;
логические нелинейные звенья.
2) Статические характеристики нелинейных звеньев могут быть однозначными, неоднозначными релейными, сложными неоднозначными в виде поля.
3) Все нелинейные звенья делят на аналитические (аналитические описания нелинейные характеристики) и неаналитические (характеристика, описывается с указанием логических условий).
4) Нелинейные САУ делятся на 2 группы:
1) с сопутствующими нелинейностями, т.е. нелинейности, проектированные как линеаризованные, но из-за наличия насыщения люфта, мертвого хода, сухого трения, являющиеся практически нелинейными.
2) с преднамеренными нелинейностями, т.е. проектируемые по заданию как нелинейные.
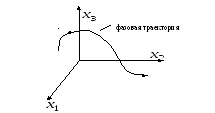
5. Вид фазовой траектории нелинейной системы.
1) 2)

3 4)
6. Понятие логарифмической амплитудно-частотной характеристики системы.
1)
2)
![]()
3)

4)
![]()
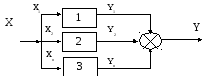
7. Передаточная функция параллельного соединения звеньев.
1)
![]() 2)
2)![]()
3)
![]() 4)
4)
![]()
8. Выражение для учета дискретного элемента дискретной системы.
1)
![]()
2)

3)
![]() 4)
4)![]()
9. Критерий устойчивости Гурвица.
1) Условие устойчивости по Гурвицу сводится к тому, чтобы при a0>0 все диагональные миноры главного определителя были >0.
2) Если корни характеристического уравнения расположены на комплексной плоскости, то для устойчивости системы необходимо, чтобы все корни лежали слева от мнимой оси.
3) Если характеристическое уравнение линеаризованной системы имеет хотя бы один корень с положительной вещественной частью, то исходная система неустойчива.
4) Чтобы САУ описываемая линейными дифференциальными уравнениями с постоянными коэффициентами была устойчивой, необходимо и достаточно, чтобы вещественные корни дифференциального уравнения были отрицательны.
10. Понятие импульсной системы.
1) Функциональная схема системы с цифровым регулятором

2) Линейной системой импульсного регулирования называется такая САР, которая кроме звеньев описываемых обыкновенными линейными ДУ содержит импульсное звено, преобразующее непрерывное входное воздействие в равноотстоящие друг от друга по времени импульсы.
3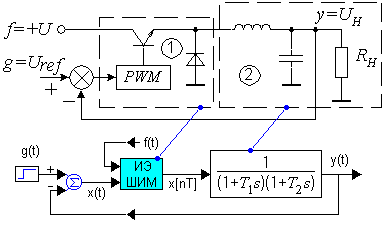 )
)
4)
11. Проведение обратных билинейных преобразований.
1)
Чтобы восстановить непрерывный сигнал
из квантованного с помощью идеального
фильтра (ИФ) с прямоугольной частотной
характеристикой необходимо выполнение
соотношения:
![]() (аналитическая формулировка теоремы
Котельникова-Шеннона).
(аналитическая формулировка теоремы
Котельникова-Шеннона).
2)
Это преобразование позволяет получить
дискретную передаточную функцию
линейного объекта из его исходной
непрерывной передаточной функции:
![]() .
При малом шаге квантования справедлива
следующая замена переменной:
.
При малом шаге квантования справедлива
следующая замена переменной:![]() .
.
3) Используют -преобразование, которое отражает окружность единичного радиуса на мнимую ось комплексной величины , с помощью подстановки:
![]() .
.
4)
чтобы в системе были процессы минимальной
длительности, все собственные числа
матрицы A
должны быть равны 0,![]() ,
тогда характеристическое уравнение
системы принимает вид:
,
тогда характеристическое уравнение
системы принимает вид:![]()
12. Схема последовательно-параллельного соединения звеньев.
1 )
)
2)
3 )
)
4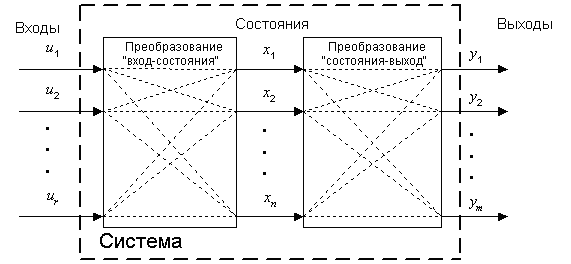 )
)
13. Определение нелинейной системы.
1) Нелинейными называются такие САУ, в которых есть хоть один нелинейный элемент, причем нелинейность может быть как статической, так и динамической.
2) Нелинейными называются такие САУ, в которых есть только один нелинейный элемент, причем нелинейность может быть как статической, так и динамической.
3) Нелинейными называются такие САУ, в которых все элементы являются нелинейными, причем нелинейность может быть как статической, так и динамической.
4) Нелинейными называются такие САУ, в которых только один элемент является нелинейным, причем нелинейность может быть как статической, так и динамической.
14. Устойчивость нелинейной системы.
1)
Система называется асимптотически
устойчивой, если при движении из начальных
условий выполняется свойство:
![]() .
.
2)
Система называется асимптотически
неустойчивой, если при движении из
начальных условий выполняется свойство:
![]() .
.
3)
Система называется асимптотически
устойчивой, если при движении из начальных
условий не выполняется свойство:
![]() .
.
4)
Система называется асимптотически
устойчивой, если при движении из начальных
условий выполняется свойство:
![]()
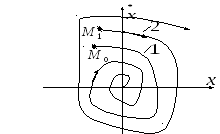
15. Что такое изоклина?
1) Изоклина - линия в пространстве состояний, объединяющая все точки с одинаковым наклоном фазовой траектории.
2) Изоклина - линия в пространстве, объединяющая все точки с одинаковым наклоном фазовой траектории.
3) Изоклина - линия в пространстве состояний, объединяющая все точки фазовой траектории.
4) Изоклина - линия в пространстве состояний, объединяющая все точки с одинаковым наклоном траектории.