

ТЕСТ
ПО «ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
для специальности «Управление и
информатика в технических системах»5 Вариантов по 15 вопросов
Указание: все задания имеют 4 варианта ответа, из которых правильный только один. Номер выбранного ответа обведите кружочком в бланке для ответов.
Вариант 2.
Критерий устойчивости Раусса.
1) Является алгебраическим критерием и позволяет по коэффициентам характеристического уравнения замкнутой системы определить место нахождения корней без решения характеристического уравнения. Критерий Раусса представляет собой правило, оформленное в виде таблицы, при этом коэффициенты уравнения, имеющие четные индексы записываются в первую строку, имеющие нечетные индексы- во вторую строку, остальные строки которых всего (n+1) и столбцы таблицы заполняются по предыдущим известным строкам на основе определенного правила.
2) Если характеристическое уравнение линеаризованной системы имеет все корни с отрицательными вещественными частями, то исходная система, описываемая нелинейными уравнениями устойчива. При этом никакие отброшенные при линеаризации члены второго и высших степеней отклонения, переменных не могут изменить устойчивость системы.
3) Если характеристическое уравнение линеаризованной системы имеет хотя бы один корень с положительной вещественной частью, то исходная система неустойчива, при этом никакие отброшенные при линеаризации второй или выше степеней отклонения переменных не могут придать системе устойчивость.
4) Если характеристическое уравнение линеаризованной системы имеет хотя бы один вещественный корень или пару чисто мнимых сопряженных корней, то поведение действительной системы не может определяться его линеаризованным уравнением. Линеаризованная система находится на границе устойчивости и отброшенные при линеаризации уравнения члены второй или выше степеней отклонения переменных, коренным образом изменяют описание динамического процесса реальной системы.
Передаточная функция интегрирующего звена.
1)
![]() .
2)
.
2)![]() .
3)
.
3)![]() 4)
4)![]()
Передаточная функция параллельного соединения звеньев.
1)
![]() 2)
2)![]()
3)
![]() 4)
4)
![]()
Понятие перегулирования системы.
1)
Перерегулирование – это время, в течении
которого начиная с момента приложения
воздействия на систему отклонение
регулируемой величины
![]() от
ее установившегося значения
от
ее установившегося значения![]() будут
больше наперед заданного значения
будут
больше наперед заданного значения![]() .
.
2)
Перерегулирование
![]() - этоmax
отклонение
- этоmax
отклонение
![]() регулируемой величины от установившегося
значения, выражение в % от
регулируемой величины от установившегося
значения, выражение в % от![]() .
.
3) Перерегулирование определяет быстродействие переходного процесса.
4)
Перерегулирование– это время, в течении
которого начиная с момента приложения
воздействия на систему отклонение
регулируемой величины
![]() от
ее установившегося значения
от
ее установившегося значения![]() будут
меньше наперед заданного значения
будут
меньше наперед заданного значения![]() .
.
5. Понятие логарифмической амплитудно-частотной характеристики системы.
1)
2

![]()
3)

4)
![]()
6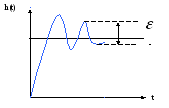 .
Понятие переходного процесса с
перерегулированием.
.
Понятие переходного процесса с
перерегулированием.
1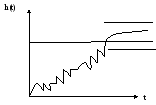 )
)
2)

3)
4 h(t) t
tp - hmax h( )
)










![]()

![]()

![]() )
)




![]()


![]()


![]()

 1
1


![]()
![]()
![]()
![]()
7. Косвенные оценки качества переходных процессов.
1)
1) Время регулирования
![]() .
.
2)
Перерегулирование
![]() .
.
3) Время достижения максимального значения.
4) Резонансная частота.
5) Частота среза.
6)
Полоса пропускания
![]() .
.
2)
![]() - интегральная оценка нулевого порядка;
- интегральная оценка нулевого порядка;
![]() -
интегральная оценка первого порядка;
-
интегральная оценка первого порядка;
……………………..
![]() -
интегральная оценка n-го
порядка.
-
интегральная оценка n-го
порядка.
3)
 - Установившаяся ошибка
- Установившаяся ошибка
- Колебательность системы.
4)
1) Время регулирования
![]() .
.
2)
Перерегулирование
![]() .
.
3) Время достижения максимального значения.
8. Выражение пропорционального закона регулирования.
1)
![]() ;
2)
;
2)![]() ;
3)
;
3)![]() ;
4)
;
4)
![]() .
.
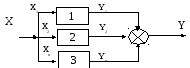
9. Схема последовательно-параллельного соединения звеньев.
1 )
)
2)
3 )
)
4)
10. Устойчивость нелинейных систем.
1) 1) Если все корни линеаризованного уравнения левые, то исходная нелинейная система устойчива. Эта устойчивость в «малом» в окрестности точки, вблизи которой выполнено разложение в ряд.
2) Если среди корней линеаризованного уравнения есть хотя бы один правый корень, то исходная нелинейная система неустойчива.
3) Если среди корней линеаризованного уравнения есть хотя бы один нулевой корень, то судить о устойчивости нелинейной системы по линеаризованному уравнению нельзя. Для оценки устойчивости необходим анализ влияния старших отброшенных членов разложения в ряд Тейлора.
2)
Поведение СУ, ее устойчивость связана
с отклонением текущих координат
![]() от заданных
от заданных![]() .
.![]() . Если
. Если![]() уменьшается, то система обычно устойчива.
Она считается абсолютно устойчивой,
если выполняется условие
уменьшается, то система обычно устойчива.
Она считается абсолютно устойчивой,
если выполняется условие![]() .
.
3) Система неустойчива в разомкнутом состоянии, число корней, m=2, т.к. годограф Wp(jw) охватывает в положительном направлении точку (-1, j0), один раз, то замкнутая система устойчива.
4)
Система в разомкнутом состоянии
устойчива, тогда изменения аргумента
характеристического уравнения разомкнутой
системы определяется:
![]() .
.
11. Выражение для учета дискретного элемента дискретной системы.
1)
![]()
2)

3)
![]() 4)
4)![]()
12. Определение нелинейной системы.
1) Нелинейными называются такие САУ, в которых есть хоть один нелинейный элемент, причем нелинейность может быть как статической, так и динамической.
2) Нелинейными называются такие САУ, в которых есть только один нелинейный элемент, причем нелинейность может быть как статической, так и динамической.
3) Нелинейными называются такие САУ, в которых все элементы являются нелинейными, причем нелинейность может быть как статической, так и динамической.
4) Нелинейными называются такие САУ, в которых только один элемент являебся нелинейным, причем нелинейность может быть как статической, так и динамической.
13. Устойчивость нелинейной системы.
1)
Система называется асимптотически
устойчивой, если при движении из начальных
условий выполняется свойство:
![]() .
.
2)
Система называется асимптотически
неустойчивой, если при движении из
начальных условий выполняется свойство:
![]() .
.
3)
Система называется асимптотически
устойчивой, если при движении из начальных
условий не выполняется свойство:
![]() .
.
4)
Система называется асимптотически
устойчивой, если при движении из начальных
условий выполняется свойство:
![]()
14. Что такое изоклина?
1) Изоклина - линия в пространстве состояний, объединяющая все точки с одинаковым наклоном фазовой траектории.
2) Изоклина - линия в пространстве, объединяющая все точки с одинаковым наклоном фазовой траектории.
3) Изоклина - линия в пространстве состояний, объединяющая все точки фазовой траектории.
4) Изоклина - линия в пространстве состояний, объединяющая все точки с одинаковым наклоном траектории.
15.Что такое автоколебания?
1) Автоколебания - колебания с постоянной амплитудой и частотой, возникающие в системе при отсутствии периодического сигнала на входе.
2) Автоколебания - колебания с постоянной амплитудой, возникающие в системе при отсутствии периодического сигнала на входе.
3) Автоколебания - колебания с постоянной частотой, возникающие в системе при отсутствии периодического сигнала на входе.
4) Автоколебания - колебания с постоянной амплитудой и частотой, возникающие в системе.