

1. Основные понятия и определения ТАУ.
Автоматика – обл-ть науки и техники, в кот. рассматриваются вопросы исследования и проектирования технических систем, действующих без непосредственного участия человека.
Автоматика – раздел технической кибернетики. Составной частью автоматики как науки является теория автоматического управления и регулирования.
ТАУ дает основную теорет. базу для решения задач анализа и синтеза АСУ.
Термин кибернетика был впервые введен Винером в 1947г.
Управление – это свойство организованных систем различной природы обеспечивать заданный режим функционирования системы и сохранять или необходимым образом изменять структуру системы для выполнения этой системой заданной задачи (цели) управления или какой-либо программы.
Управляющая сис-ма – это совокупность тех. средств которые стремятся обеспечить выполнение объектом управл. определенной задачи или цели управления.
Процесс управления – любые изменения состояния объекта управления, которые ведут к достижению поставленной цели.
АСУ – это объект управления, измерительная или управляющая аппаратура, кот. объеденена в единое целое.
2 типа АСУ: замкнутые и разомкнутые.
В ЗСАУ нет спокойного состояния равновесия, т.к. всегда есть внешние возмущения.
Основные задачи САУ:
1. Задача анализа САУ:
- разработка методов исследования качества процессов
- исследование устойчивости САУ
- исследование точности САУ
2. Синтез САУ (проектирование):
- разработка теоретических основ проектирования САУ
- алгоритмические основы САУ
2. Математические модели сау.
Мат. модели – это математические соотношения, которые описывают процессы, протекающие в САУ.
В основе формирования мат. модели САУ лежит физическое описание всех процессов, кот. протекают в исследуемой системе.
Требования к мат. моделям САУ:
Математическая модель должна как можно точнее отражать физические процессы в исследуемой системе управления.
Мат. модель САУ должна быть достаточно простой и наглядной, чтобы излишне не усложнять исследования.
Основные этапы составления математических моделей систем автоматического управления и регулирования:
Разделение системы автоматического управления на отдельные элементы.
На функциональной схеме указывают:
связь между элементами;
направления распространения сигналов;
входные и выходные переменные.
Составляют мат. модели каждого элемента системы;
--//-- связей между эл-тами системы;
--//-- внутрен. и внешних помех, действующих на сис-му;
--//-- внешних возмущений, действующих на систему.
Мат. мод. исследуемой сис-мы – это совокупность мат. моделей эл-тов сис-мы, моделей связей между эл-тами, и моделей помех и возмущений, действующих на объект управления и на САУ.
Формы представления мат. моделей САУ:
дифференцианые уравнения;
передаточные функции;
структурные схемы.

3. Дифференциальные ур-я сау:
Динамические процессы в САУ можно описать линейным дифуром, кот. в самом общем случае имеет вид:
![]()
![]()
![]() -
выход системы;
-
выход системы;
![]() -
вход системы (известна функция времени).
-
вход системы (известна функция времени).
В реальных системах
управления
![]() – условие физической реализуемости
системы.
– условие физической реализуемости
системы.
Чтобы решить это
ДУ необходимо задать
![]() начальных условий:
начальных условий:
![]()
Решение имеет вид:
![]()
где
![]() общее решение однородного дифура
общее решение однородного дифура
![]()
![]() -
определяет собственное движение системы.
-
определяет собственное движение системы.
![]() - частное решение
линейного неоднородного дифура,
определяет вынужденное движ-е сис-мы,
кот. определяется входным воздействием
- частное решение
линейного неоднородного дифура,
определяет вынужденное движ-е сис-мы,
кот. определяется входным воздействием
![]() .
.
Введем в рассмотрение новые переменные:
![]() ,
,
![]() ,
…,
,
…,
![]()
Дифур преобразуется к сис-ме дифуров в нормал. форме Коши:
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
… ,
,
… ,
![]() - переменные состояния САУ, ее фазовые
перем. Связь переменных состояния
системы с выходной ее переменной
- переменные состояния САУ, ее фазовые
перем. Связь переменных состояния
системы с выходной ее переменной
![]() задается формулой:
задается формулой:

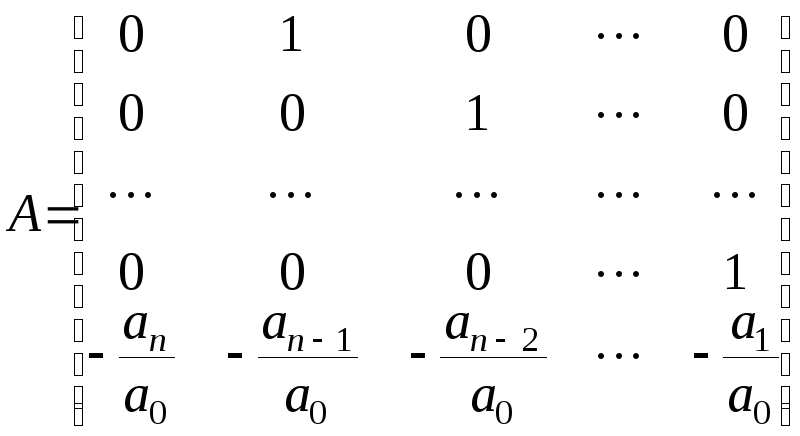
В векторно-матричной форме записи:
![]()
 ;
;
 ;
;

 ;
;
 ;
;
 ;
;
Реш-е ур-я относит. Переем. сост-я сис-мы задается ф-лой Коши:
![]() ,
,
где![]() - заданные н.у.;
- заданные н.у.;
![]() - матричная экспонента:
- матричная экспонента:
 ,
где I
– ед.мат.:
,
где I
– ед.мат.:![]()
Подставив (*) во 2ое ур-е векторно-матричной формы получим ур-е выхода системы в явном виде:

4. Передаточные функции сау:
Передаточная функция САУ - это одна из форм представления ее мат. модели.
Передаточная функция сис-мы или ее эл-та – это отношения изображения по Лапласу выходного сигнала к входному при начальных нулевых условиях.
Если мат.мод. имеет вид:
![]()
то из этих ур-й можно получить ПФ:
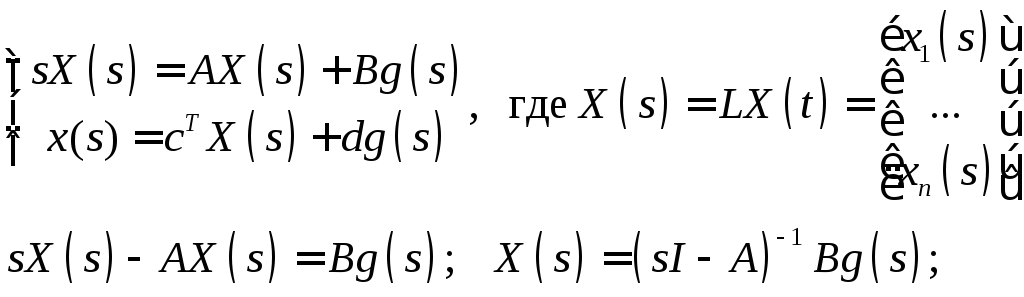
Подставим получившееся равенство во второе ур-е сис-мы:
 Замечание:
Справедливы след. Равенства:
Замечание:
Справедливы след. Равенства:
![]()
Это один из способов вычисления матричной экспоненты.