

5 Разработка алгоритма работы микропроцессорной
СИСТЕМЫ
Обработка
информации от цифровых датчиков и выдача
управляющего воздействия y1
производится путем ввода значений x1,
x2,
x3,
x4
и вычисления булевой функции f1(x1,
x2,
x3,
x4)=
При единичном значении f1 вырабатывается управляющий сигнал y1=1 длительностью t1=100мкс.
При обработке информации с аналоговых датчиков ПМ принимает коды NU1, NU2 с выходов АЦП и код константы К с регистра пульта управления. Далее вычисляется значение функции NU=f2(NU1,NU2, К)=max(NU1,NU2) и сравнивается с константой Q, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается (аналогично y1) один из двух двоичных управляющих сигналов y2 или y3 заданной длительности по следующему правилу: если NU<Q, то выдать y2 длительностью t2=220 мкс, иначе выдать y3 длительностью t3=30мкс.
Далее формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 и производится вычисление по формуле:

Значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
Все двоичные переменные и константы, участвующие в вычислениях: NU1, NU2, NU3, К, Q, A0, A1, Y4 рассматриваются как целые без знака.
После выдачи всех управляющих воздействий проверяется состояние тумблера «СТОП» на пульте управления. Если СТОП=0, цикл управления начинается с начала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов длительностью 30 мкс интервалом 30 мкс, выполняется команда процессора СТОП.
Блок-схема заданного цикла управления разбита на две части (рисунок 37 и 38), общая блок-схема представлена на рисунке 39.
В общем виде управляющая программа состоит из двух циклов, по результатам выполнения которых осуществляется выдача управляющих воздействий на индикацию. Управляющая программа выполняется до тех пор, пока на пульте управления не будет включен тумблер «СТОП».
Цикл 1 управляющей программы заключается в вводе в центральный процессор значений сигналов из цифровых датчиков, вычислении булевой функции y = x1 x2 &x3 & x4. Если по результатам вычисления получилось, что управляющий сигнал стал равен 1, то выдается управляющий сигнал длительностью t1=100 мкс. Если же управляющий сигнал принял значение 0, то булевая функция y = x1 x2 &x3 & x4 вычисляется вновь.
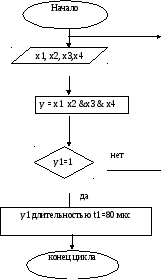
Рисунок 42– Цикл 1 управляющей программы
Цикл
2 управляющей программы заключается в
воде в центральный процессор двоичных
кодов с выходов АЦП и констант К и Q,
вычислении значения функции f2(NU1,
NU2,
К), по выражению NU=
max(NU1;
NU2).
Если по результатам вычисления получилось,
что NU<Q,
то вырабатывается управляющий сигнал
длительность t2=220
мкс, если же получилось что NU>Q,
то вырабатывается управляющий сигнал,
длительностью t3=30мкс.
Далее осуществляется ввод в центральный
процессор двоичного кода с выхода АЦП
NU3
и производиться вычисление функции
 .
.
Цикл 2 изображен на рисунке 38
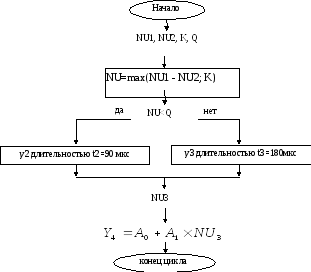
Рисунок 43 – Цикл 2 управляющей программы

Рисунок 44– Общая блок-схема программы