

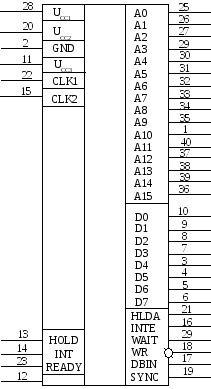
4.3 Цоколевка микросхемы кр580ик80а
Цоколевка микросхемы КР580ИК80А представлена на рисунке 4.
R
Рисунок 4 - цоколевка микросхемы КР580ИК80А
Назначение выводов :
А(15 - 0) – трехстабильная 16-разрядная шина адреса;
D(7 – 0) – двунаправленная трехстабильная 8-разрядная шина данных;
WR – выход сигнала «выдача» - напряжение L-уровня указывает на выдачу байта информации на шину D(7 – 0)для записи в ЗУ или УВВ;
DBIN – выход сигнала «прием» - напряжение Н-уровня указывает на прием с шины D(7 – 0) байта информации, выданного ЗУ или УВВ;
INTE – выход сигнала «разрешение прерывания»;
INT – вход сигнала «запрос на прерывание»;
HLDA – выход сигнала «подтверждение захвата» - напряжение Н-уровня указывает на перевод шин адреса и данных МП в высокоимпедансное состояние;
HOLD – вход сигнала «захват» - напряжение Н-уровня указывает на запрос другими устройствами системы на управление шинами системы;
WAIT – выход сигнала «ожидание» - напряжение Н-уровня указывает на
состояние ожидания МП;
READY – вход сигнала «готовность» - напряжение Н-уровня указывает на готовность данных на шине D(7 – 0) к вводу в МП или на готовность внешних устройств к приему информации, служит для синхронизации микропроцессоров с ЗУ или УВВ;
SYNC – выход сигнала «синхро» - напряжение Н-уровня идентифицирует начало каждого машинного цикла;
CLK1, CLK2 – тактовые сигналы, определяют тактовую частоту работы МП БИС;
R – вход установки 0 – установка счетчика команд в нуль, сброс триггеров разрешения прерывания и захвата шин;
UCC1 – напряжение питания (+5 В);
UСC2 – напряжение питания (+12 В);
UСС3 – напряжение питания (-5 В);
GND – общий вход (напряжение питания 0 В).
5 Описание управляющей программы
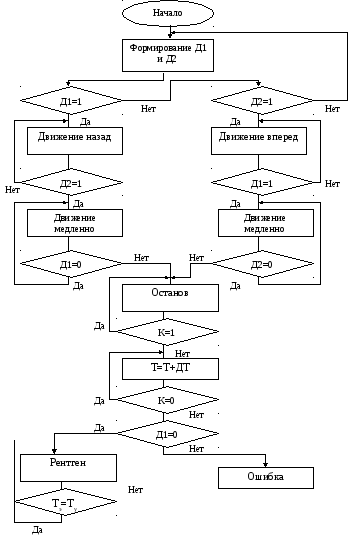
Пуск аппарата. В исходном состоянии какие-либо команды отсутствуют и регистры общего назначения, используемые для хранения команд, находятся в нулевом состоянии. Команды подаются посредством перемещения радиоизотопного командоаппарата К с узкой диаграммой излучения над блоком детекторов (БД) слева направо при пуске ВПЕРЕД и справа налево при пуске НАЗАД . После команды на движение ВПЕРЕД или НАЗАД детекторы переходят в состояния Д1=ОΛД2=1 или Д1=1ΛД2=0, соответственно. Одновременно логическая функция Н принимает значение Н=1 (соответствует первому циклу облучения детекторов) и микропроцессор фиксирует заданное направление движения аппарата. При дальнейшем перемещении командоаппарата К в том же направлении детекторы переходят в состояние Д1=1ΛД2=1 (момент времени Т2), а в момент времени ТЗ — в состояние Д1 = 1ΛД2=0 при движении ВПЕРЕД или Д1=0ΛД2=1 при движении НАЗАД. В обоих указанных состояниях робототехнологический комплекс «СИРЕНА-1» не изменяет своего положения, а полученные команды используются для более надежной идентификации команды на включение электропривода. В момент времени Т4, когда оба детектора Д1 и Д2 не облучаются и имеют состояния Д1=Д2 = 0. электропривод включается на движение в заданную сторону и робототехнологический комплекс перемещается внутри трубопровода в заданном направлении с номинальной скоростью.
Остановка аппарата. Движение аппарата продолжается до внешнего управляющего воздействия командоаппарата К, установленного на поверхности трубопровода на определенном расстоянии от контролируемого шва. В этот момент при движении ВПЕРЕД состояние детекторов будет Д1 = 1ΛД2=0, а при движении НАЗАД —Д1=0ΛД2=1 (момент времени Т5), т. е. порядок облучения детекторов изменяется на обратный по отношению к режиму пуска аппарата, а логическая функция Н переходит в состояние Н = 0 (соответствует второму циклу облучения детекторов). Указанные состояния детекторов при Н=0 приводят а торможению робототехнологического комплекса «СИРЕНА-1» и переходу
электропривода на промежуточную скорость. Это обеспечивает повышенную точность остановки и устраняет упругие колебания в кинематических цепях электропривода. В момент возникновения состояния Д1=Д2=1 при Н=0 самоходный робототехнологический комплекс останавливается в плоскости сварного шва.
Включение излучателя инициируется удалением командоаппарата К с поверхности трубопровода после остановки комплекса. Это переводит детекторы в состояние Д1=0ΛД2 = 0 при Н = 0, микропроцессор отсчитывает паузы безопасности для удаления обслуживающего персонала на безопасное расстояние и автоматически включает рентгеновский излучатель и таймер выдержки экспозиции. В этом режиме сварной шов просвечивается на рентгеновскую пленку. По окончании работы рентгеновского излучателя проводится начальная установка всех элементов системы управления в исходное состояние и они готовятся к новой последовательности команд.
На рис.5 изображен алгоритм работы дефектоскопа «Сирена-1»
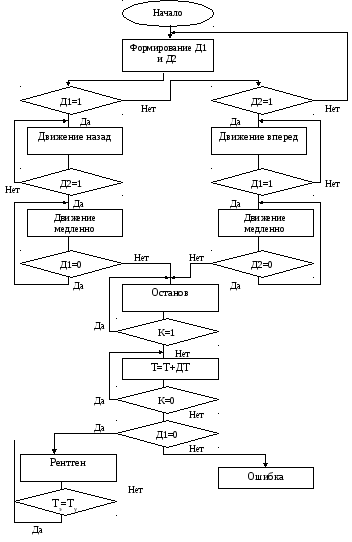

Рисунок 5 – Алгоритм работы дефектоскопа «Сирена-1»
ЗАКЛЮЧЕНИЕ
В ходе курсовой работы разработана перенастраиваемая микропроцессорная система управления самоходным рентгеновским дефектоскопом «Сирена-1». В процессе работы разработана электрическая схема устройства, проведен анализ критериев выбора микропроцессора, анализ структуры микропроцессора и разработка алгоритма управляющей программы. Из этого анализа следует, что используемый в разработанной системе микропроцессор (К580ИК80), является наиболее предпочтительным для разработанного устройства.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
-
Алексеев В. Н., Коновалов А. М., Колосов Р. Т. Микропроцессорные средства производственных систем. – Л.: Машиностроение, 1988.
-
Горбунов В. Л., Панфилов Д. И., Преснухин Д. Л. Справочное пособие по микропроцессорам и микроЭВМ. – М.: Высшая школа, 1988.
-
Данильченко Н.Т. Перенастраиваемая микропроцессорная система управления самоходным рентгеновским дефектоскопом «Сирена-1»// Микропроцессорные средства и системы. – 1989. – №1.
-
Майоров С. А., Кириллов В. В., Приблуда А. А. Введение в микроЭВМ. – Л.: Машиностроение, 1988.
-
Преснухин Л. Н. Микропроцессоры. – М.: Высшая школа, 1986.
ПРИЛОЖЕНИЕ А
(обязательное)
Графическая часть
1 Функциональная схема дефектоскопа «Сирена-1» 29
-
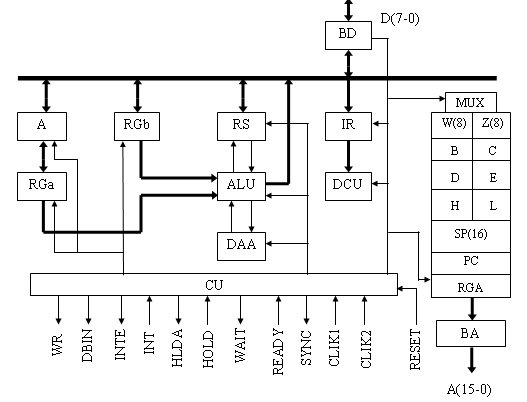
Структурная схема микропроцессора КР580ИК80А 30
-
Цоколевка микросхемы КР580ИК80А 31
4 Блок-схема алгоритма управляющей программы 32
Ф УНКЦИОНАЛЬНАЯ
СХЕМА ДЕФЕКТОСКОПА «СИРЕНА-1»
УНКЦИОНАЛЬНАЯ
СХЕМА ДЕФЕКТОСКОПА «СИРЕНА-1»
СТРУКТУРНАЯ СХЕМА МИКРОПРОЦЕССОРА КР580ИК80А
БЛОК-СХЕМА АЛГОРИТМА УПРАВЛЯЮЩЕЙ ПРОГРАММЫ

ЦОКОЛЕВКА МИКРОСХЕМЫ КР580ИК80А

УИТС.425700.123.