

4.6 Уточненная схема управляющей микроЭвм
По результатам сделанного подбора микросхем начертим уточненную схему управляющей микроЭВМ (рисунок 24) и функциональную схему управляющей микроЭВМ (приложение А1).
Y4
Пульт
управления
ЦАП
К572ПА1
ОМВЭВМ К1816ВЕ51




УВВ
Буферный регистр
К589ИР12
КПДП
КР580ВТ57
АЦП
К1113ПВ1
Контроллер
клавиатуры/дисплея
КР580ВД79
Сигналы с датчиков
Рисунок 24 – Уточненная структурная схема управляющей микроЭВМ
Для сопряжения блоков АЦП и ЦАП с микроЭВМ использован многорежимный буферный регистр К589ИР12.
Ввод управляющих сигналов и световой индикации через интерфейс ввода-вывода (ИВВ) осуществляется с помощью контроллера клавиатуры/дисплея КР580ВД79.
5 Разработка программного обеспечения
5.1 Алгоритм управления объектом
Обработка информации от цифровых датчиков и выдача управляющего воздействия y1 производится путем ввода значений х1, х2, х3 и вычисления значения булевой функции f1(х1, х2, х3).
При единичном значении f1 вырабатывается управляющий сигнал y1=1 длительностью t1. Это значит, что через t1 после выдачи y1 = 1 необходимо выработать y1=0.
При обработке информации с аналоговых датчиков ПМ принимает коды NU1, NU2 с выходов АЦП и код константы К с регистра пульта управления. Далее вычисляется значение функции NU=f2 (NU1, NU2, К) и сравнивается с константой Q, хранящейся в ПЗУ. В зависимости от результатов сравнения вырабатывается (аналогично у1) один из двух двоичных управляющих сигналов у2 или у3 заданной длительности по следующему правилу: если NU < Q, то выдать у2 длительностью t2, иначе выдать у3 длительностью t3.
Далее формируется управляющее воздействие Y4, для чего с АЦП вводится значение NU3 и производится вычисление по формуле:
Y4=A0+AlхNU3.
Значение Y4 в виде 8-разрядного кода выдается на вход ЦАП.
Все двоичные переменные и константы, участвующие в вычислениях: NU1, NU2, NU3, К, Q, Ао, A1, Y4 рассматриваются как целые без знака.
После выдачи всех управляющих воздействий проверяется состояние тумблера "СТОП" на пульте управления. Если СТОП=0, цикл управления начинается с начала, иначе выполняется процедура останова системы, включающая следующие действия: формируется сигнал установки системы в исходное состояние путем подачи на линию начальной установки интерфейса двух прямоугольных импульсов длительностью 30 мкс интервалом 30 мкс; выполняется команда процессора СТОП.
Алгоритм управления, заданный видом функцией:
Управляющее
воздействие
![]() ,
длительность управляющих сигналов t1
= 80 c;
,
длительность управляющих сигналов t1
= 80 c;
NU = NU1 – NU2 + К, длительность управляющих сигналов t2=125 c, t3=75 c.
5.2 Разработка блок-схемы управляющей системы
По заданному алгоритму управления составим блок-схему управляющей программы (рисунок 25).
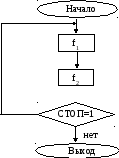
-вычисления значения булевой функции f1(х1, х2, х3)
- вычисление
значения функции f2(NU1,
NU2,
К)
вычисление
значения функции f2(NU1,
NU2,
К)
да
-проверка состояния тумблера «СТОП» на пульте управления
Рисунок 25 - Блок-схема управляющей программы
Б лок-схемы
вычисления значений булевой функции
f1(х1,
х2,
х3)
и функции NU=f2
(NU1,
NU2,
К) представлены на рисунках 26 и 27,
соответственно.
лок-схемы
вычисления значений булевой функции
f1(х1,
х2,
х3)
и функции NU=f2
(NU1,
NU2,
К) представлены на рисунках 26 и 27,
соответственно.

-

 ввод в ЦП двоичных кодов с выходов АЦП
и констант К и Q
ввод в ЦП двоичных кодов с выходов АЦП
и констант К и Q

-
![]()
f 2(NU1,
NU2,
К)
2(NU1,
NU2,
К)
нет
- условие на
результат вычисления
условие на
результат вычисления
нет
да

-
да
 выдача управляющего сигнала
выдача управляющего сигнала
Выдача
управляющих
сигналов


Рисунок 26 - Блок-схема вычисления значения функции f1(х1, х2, х3)

- ввод в ЦП двоичных кодов с выходов АЦП и констант К и Q
- вычисление значения функции f2(NU1, NU2, К)
- условия на результат вычисления
- вычисление функции Y4
Рисунок 27 - Блок-схема вычисления значения функции f2(NU1, NU2, К)