

4 Принцип действия схемы дистанционного управления электровозом
Для контактных электровозов наиболее простой и надежной является система дистанционного управления по контактной сети. На рисунке 4 показана схема дистанционного управления электровозами, для обеспечения безопасности, участок где применяется дистанционное управление, имеет контактный провод 3, изолированный от остальной контактной сети 1 изоляторами 2.Электровоз по инерции въезжает на этот участок и останавливается. Машинист электровоза устанавливает контроллер в одно из начальных положений и переходит к пункту дистанционного управления. Для движения состава вперед он нажимает и удерживает кнопку S1, в результате чего срабатывает контактор К1 и подает напряжение на изолированный участок. На электровозе срабатывает контактор К3 и включает привод электровоза. Начинается перемещение состава со скоростью, определенной начальным положением контролера (резистор R). Электровоз останавливается после отпускания кнопки S1.
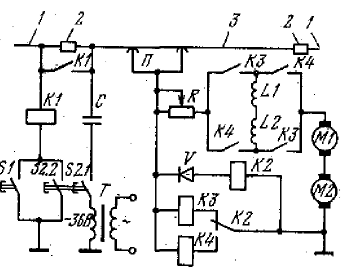
Рисунок 4-Схема дистанционного управления электровозом
Для движения состава назад машинист нажимает кнопку S2, конструкция которой предусматривает замыкание сначала контакта S2.1,а затем S2.2.
Вследствие
этого сначала от трансформатора Т
включится реле К2 для подготовки цепи
контактора К4, а затем при включении
контакторов К1 и К4 подключаются двигатели
электровоза для движения состава в
обратном направлении до тех пор, пока
машинист не отпустит кнопку S2. Недостатком такой схемы управления
является резкое трогание состава с
места.
Недостатком такой схемы управления
является резкое трогание состава с
места.
Для дистанционного управления аккумуляторными электровозами используется система СТАРТ-1, с помощью которой обеспечивается двусторонний обмен информацией между электровозными и путевыми приемопередатчиками. Для передачи на электровоз на частоте 72 кГц используется четыре модулированных по амплитуде сигнала, для передачи с электровоза на частоте 150 кГц – два модулированных по амплитуде сигнала.
В состав комплекса СТАРТ-1 входят: аппаратура пункта управления, содержащая пульт управления, мнемосхему, устройства расшифровки сигналов и разделения цепей; аппаратура сигнализации и блокировки путевого участка, состоящая из путевых датчиков, светофоров, блока блокировки маршрутов, устройства задания и блокировки маршрутов; аппаратура обмена информацией между электровозом и путевыми устройствами автоматики; аппаратура автоматического управления аккумуляторным электровозом.
Система СТАРТ-1 обеспечивает: дистанционное управление электровозом на погрузочном пункте, при котором машинист выполняет функции оператора погрузки; автоматическое управление движением поездов без машинистов в магистральных выработках и дистанционное – в местах погрузки, при этом задание и контроль маршрутов выполняются оператором пункта управления; путевую сигнализацию и блокировку на стрелках путевых участков при запросе машинистом маршрута движения; централизованный контроль местонахождения поездов, контроль занятости участков пути с помощью мнемосхемы путевого развития; централизованное управление и контроль за движением поездов.