

4.2 Посадочные аппараты
Данные аппараты предназначены для подачи посадочного материала в посадочное место и удержания его во время первоначальной заделки почвой.
К посадочным аппаратам предъявляются следующие основные агротехнические требования: повреждение посадочного материала должно быть в допустимых пределах; шаг и глубина посадки должны быть равномерными; скорость движения посадочного материала относительно почвы в момент заделки корней должна быть равна нулю; в момент заделки корневой системы необходимо обеспечивать вертикальное положение посадочного материала.
Для выполнения этих требований применяется несколько типов посадочных аппаратов, основными из которых являются: ротационные (лучевые и дисковые); рычажные (с качающимся и перемешающимся по сложной кривой захватами); конвейерные (ременные, цепные, гусеничные); гравитационные (рисунок 3).
Ротационный лучевой посадочный аппарат (рисунок 3, а) имеет наибольшее применение в посадочных машинах. Он состоит из вала с жестко установленной ступицей и диском 4, на котором установлены держатели 3 с захватами 2. При вращении вала со ступицей ролики 1 набегают на верхний раскрыватель 5 и, взаимодействуя с ним, раскрывают захват в верхней части для закладки в него посадочного материала. После схода с раскрывателя захват 2 при помощи пружины закрывается, удерживая растение и перенося его в посадочную щель. При нахождении захвата 2 с растением в нижнем положении ролик 1 наталкивается на нижний раскрыватель 6 и открывает захват, освобождая растение. Регулировка момента раскрытия и закрытия захватов осуществляется перемещением раскрывателей, а шаг посадки - изменением числа держателей с захватами на диске.
Ротационный дисковый с эластичным кольцом (рисунок 3, б) представляет собой жесткий диск 1, закрепленный на ступице 2, которая установлена на оси. Эластичное кольцо 4, являющееся захватом, прижимается к жесткому диску 1 пружинящими спицами 3, вставленными в углубления ступицы. На раме машины в верхней и нижней частях жесткого диска 1 установлены раскрывающие и прижимные ролики. При движении машины вращение передается на жесткий диск 1 с эластичным кольцом 4. При вращении жесткого диска 1 раскрывающие ролики отделяют эластичное кольцо 4 от жесткого диска 1 в местах захвата и высадки посадочного материала. На остальных участках пути посадочный материал удерживается между жестким диском 1 и эластичным кольцом 4 спицами 3 и прижимными роликами. Момент отделения эластичного диска осуществляется изменением положения раскрывающих роликов, шаг посадки - произвольный.
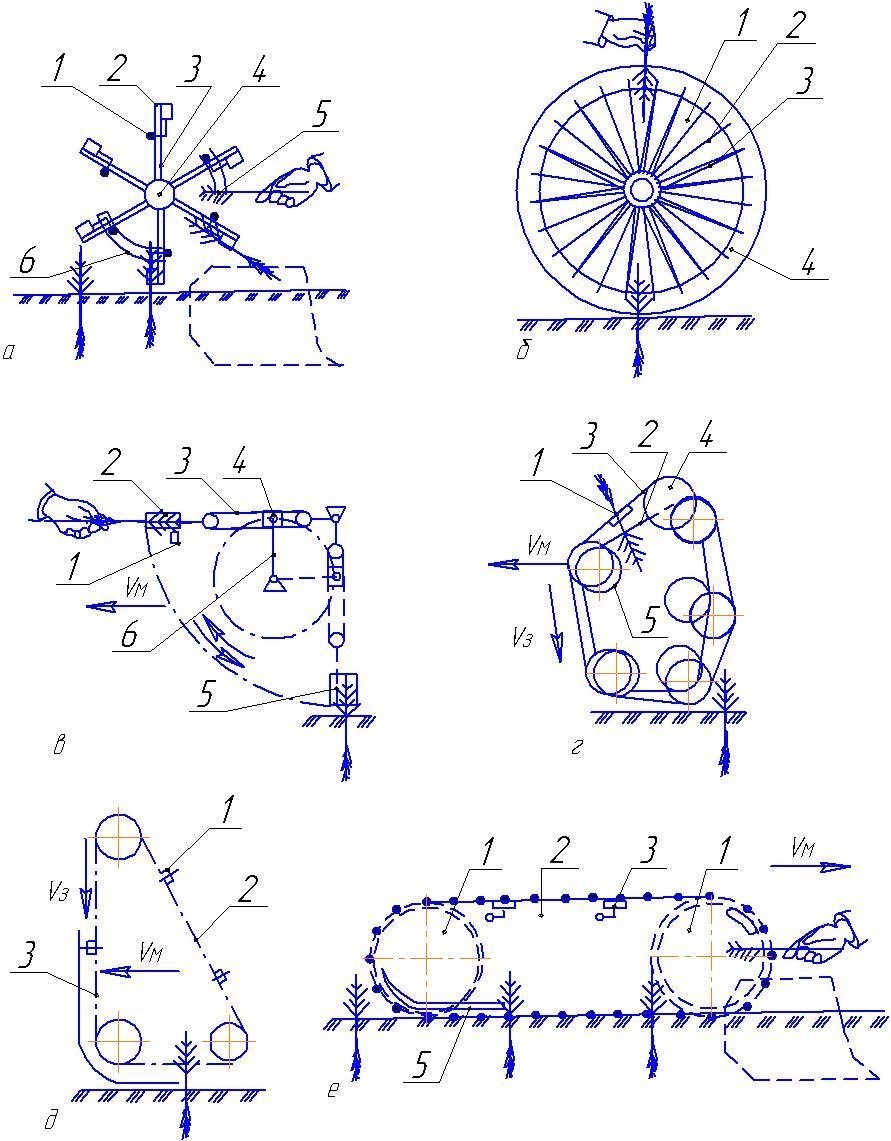
а) ротационный лучевой: 1 – ролик; 2 – захват; 3 – держатель;
4 – диск; 5 – верхний раскрыватель; 6 – нижний раскрыватель;
б) ротационный дисковый с эластичным кольцом: 1 – жесткий диск; 2 – ступица; 3 – спица; 4 – эластичное кольцо;
в) рычажный с качающимся захватом: 1 – верхний упор; 2 – захват; 3 – рычаг-кулиса; 4 – ползун; 5 – нижний упор;6 – кривошип;
г) ременный: 1 – эластичная подушечка; 2 – плоский ремень; 3 – клиновидный ремень; 4 – шкив клиновидного ремня;5 – шкив плоского ремня;
д) цепной: 1 –держатель; 2 – цепь; 3 – направляющая планка;
е) гусеничной: 1 – направляющий шток; 2 – гусеница; 3 – держатель; 4 – верхний раскрыватель;5 – нижний раскрыватель
Рисунок 3 – Типы посадочных аппаратов рассадопосадочных машин
Рычажный посадочный аппарат с качающимся захватом (рисунок 3, в) представляет собой кривошипно-кулисный механизм 1 качающейся кулисой, преобразующей вращательное движение кривошипа 6 колебательное движение рычага-кулисы 3. При движении машины вращается кривошип 6, от которого через ползун 4 движение передается на рычаг-кулису 3 с захватом 2, который совершает колебательное движение в продольно-вертикальной плоскости. При подходе к верхнему положению одна из створок захвата 2 набегает на верхний упор 1 и раскрывается. Направление движения рычага меняется на обратное и при сходе с верхнего упора 1 захват 2 закрывается и зажимает поданное сажальщиком растение. При дальнейшем движении рычаг-кулиса 3 набегает на нижний упор 5, захват 2 раскрывается и растение падает в посадочную щель. Нижний упор 5 должен быть установлен в точке, где скорость захвата Vз равна скорости машины Vм, т. е. Vз=Vм. Преимущества такого механизма: удобство подачи посадочного материала в захват; недостатки – непостоянное значение скорости движения захвата, что усложняет место установки нижнего упора 5, где Vз=Vм; ограничение возможности изменения шага посадки; кулиса-ползун требует определенных условий для нормальной и надежной работы.
Рычажной посадочный аппарат с захватом, перемещающимся по сложной кривой, имеет сложную конструкцию и низкую надежность, поэтому он не получил распространения.
Ременный посадочный аппарат (рисунок 3, г) состоит из ведущего и направляющих шкивов 4 клиновидного ремня 3, ведущего и направляющих шкивов 5 плоского ремня 2 и эластичных подушечек 1, укрепленных на клиновидном ремне 3 на расстоянии друг от друга, равном шагу посадки. В передней части плоскости шкивов и оба ремня почти подходят друг к другу, а в задней - расходятся на некоторое расстояние. Поданный сажальщиком посадочный материал в промежуток между движущимися ремнями удерживается в них и в подушечке. Зажатый посадочный материал перемещается до нижней горизонтальной ветви, где заделывается почвой. В этот момент ремни расходятся и посадочный материал освобождается.
Цепной посадочный аппарат (рисунок 3, д) состоит из цепи 2, надетой на три звездочки. На цепи 2, имеющей контур треугольника, с интервалом, равным шагу посадки, установлены держатели 1 с постоянно раскрытыми захватами. После укладки посадочного материала в захват держатель 1 попадает в зазор между направляющими планками 3, расположенными параллельно вертикальной и горизонтальной ветвями цепи 2, где захваты закрываются и удерживают посадочный материал. При нахождении захвата в посадочной щели на горизонтальном участке цепи 2 растение заделывается почвой прикатывающими катками. После заделки корней держатель 1 выходит из направляющих планок 3, захват раскрывается и освобождает посадочный материал.
Гусеничный посадочный аппарат (рисунок 3, е) состоит из бесконечной гусеницы 2, натянутой на направляющих катках 1, по краям которого закреплены держатели 3 с постоянно закрытыми захватами на расстоянии, равному шагу посадки. Привод посадочного аппарата осуществляется за счет сцепления гусеницы 2 с почвой. При подходе держателя 3 к верхнему раскрывателю 4 захват раскрывается и захватывает поданный сажальщиком посадочный материал. После схода с раскрывателя захват закрывается, и держатель 3 перемещает растение в посадочную щель. На горизонтальном участке гусеницы корневая система заделывается почвой и при подходе держателя 3 к нижнему раскрывателю 5 захват освобождает посадочный материал.
Достоинством посадочных аппаратов конвейерного типа является наличие горизонтального участка, где скорость посадочного материала относительно движения машины равна кулю и время заделки больше. Недостатки - забивание нижней ветви почвой, растительными остатками из-за близкого расположения их к почве, а также сложность изменения шага посадки.
Гравитационный посадочный аппарат представляет собой заслонку, при открытии которой посадочный материал под собственной силой тяжести, свободно или по направляющим падает в лунку и заделывается почвой. Он нашел применение при посадке культур с закрытой корневой системой.