

-
Линейные преобразования и линейные операторы
-
Матрица линейного преобразования
Рассмотрим два линейных векторных
пространства
![]() размерности n и
размерности n и
![]() размерности m. Пусть задана матрица
чисел
размерности m. Пусть задана матрица
чисел
А=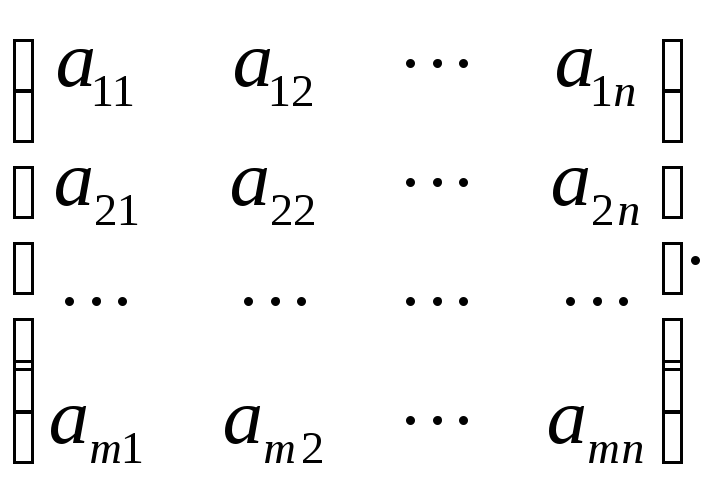
Если записать матричное равенство
Y=Ax (4.1.1)
где х=( х1, х2, …,хп)![]() то говорят, что задано линейное
преобразование векторов. Матрица А
называется линейным оператором, задающим
отображение пространства
то говорят, что задано линейное
преобразование векторов. Матрица А
называется линейным оператором, задающим
отображение пространства
![]()
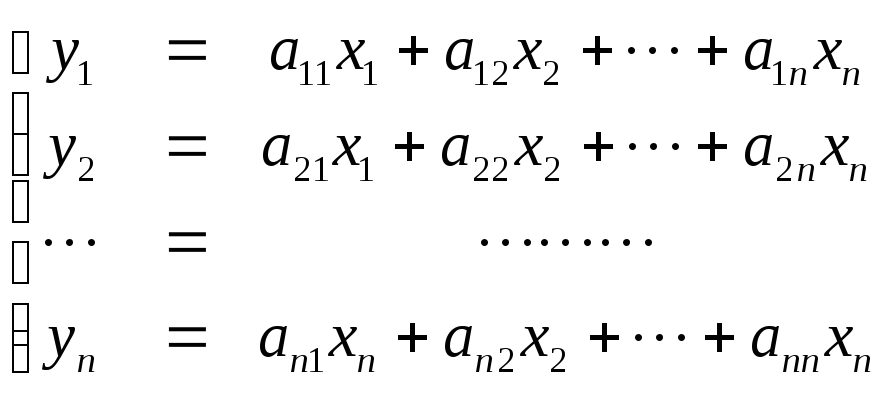
Выражение (4.1.1) через компоненты векторов имеет вид
 ( 4.1.2.)
( 4.1.2.)
Очевидно, что из (4.1.2) следует
 (4.1.3)
(4.1.3)
Если матрица квадратная и невырожденная,
то есть det (A)![]() то
вектор y=(y1,y2,…,yn)
будет принадлежать тому же пространству
Rn. Тогда говорят, что оператор А
отображает пространство Rn в себя.
Такие операторы будем использовать в
дальнейшем при изложении темы. Линейные
операторы удовлетворяют следующим
соотношениям:
то
вектор y=(y1,y2,…,yn)
будет принадлежать тому же пространству
Rn. Тогда говорят, что оператор А
отображает пространство Rn в себя.
Такие операторы будем использовать в
дальнейшем при изложении темы. Линейные
операторы удовлетворяют следующим
соотношениям:
-
А(х+у)=А(х)+А(у)
-
А(λх)=λА(х), где х,у
 ,λ- действительное число.
,λ- действительное число. -
(А+В)х=А(х)+В(х)
-
(АВ)х=А(В(х)), где матрицы А, В квадратные и одной и той же размерности. Существует нулевой оператор 0, переводящий все векторы пространства Rn в нулевые векторы 0х=0 и тождественный оператор Е, оставляющий вектор неизменным, т.е. Ех=х.
Пример. В пространстве R3 в
базисе е1,е2.е3 линейный
оператор задан матрицей А=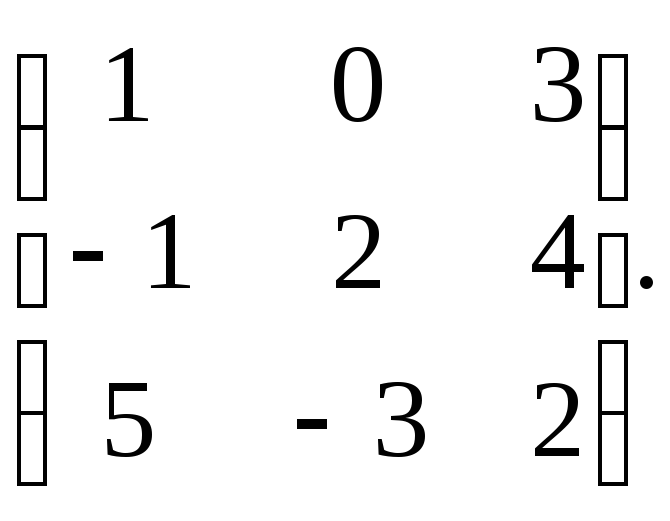 Найти образ вектора х=е1-2е2+3е3.
Найти образ вектора х=е1-2е2+3е3.
Решение. По формулам (4.1.2), (4.1.3) имеем
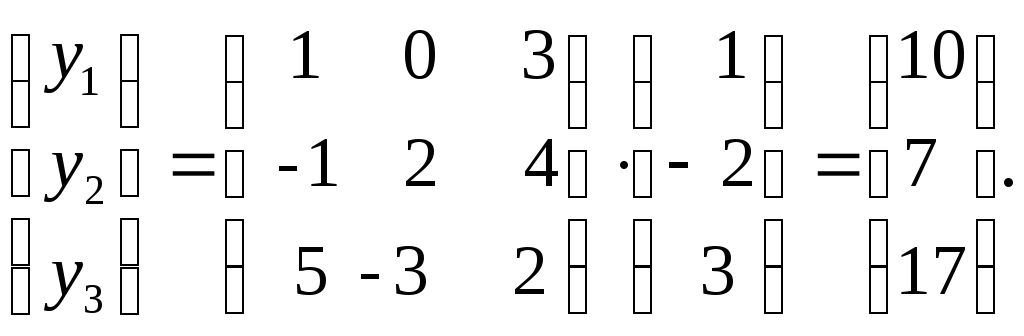
Ответ. y=10е1 +7е2 +17е3.
-
Изменение матрицы линейного преобразования при переходе к новому базису
В параграфе 3.7. мы рассмотрели пересчет координат фиксированного вектора при переходе к новому базису, ввели понятие матрицы перехода. Теперь пусть в старом базисе е1. е2….,еп имеется линейное преобразование в матричной форме
Q=AP, (4.2.1)
где Q – матрица-столбец, составленная из компонент вектора q=(q1, q2, …qn) и P-матрица-столбец, составленная из компонент вектора р=(р1,р2….,рт). А- матрица преобразования векторов
А=
При переходе к новому базису
![]() те же векторы р,q будут иметь новые
координаты р=
те же векторы р,q будут иметь новые
координаты р=![]() и
и
![]() .
Преобразование имеет вид:
.
Преобразование имеет вид:
![]() (4.2.2)
(4.2.2)
Найдем матрицу А´ из следующих соображений. По формуле (3.7.5) имеем:
Р=СР´ (4.2.3)
Q=CQ´ (4.2.4)
Здесь С - матрица перехода. В равенство (4.2.1) подставим (4.2.3) и (4.2.4), получим:
СQ´=ACP´ (4.2.5)
Умножим равенство (4.2.5) слева на матрицу С-1, обратную матрице перехода: С-1СQ´=С-1АСР´.
Так как С-1С=Е- единичная матрица, то получаем:
Q´=C-1АСР´ (4.2.6)
Это и есть линейное преобразование векторов в новом базисе. Матрица линейного оператора в новом базисе вычисляется по формуле:
А´=С-1АС (4.2.7)
Заметим, что из матричной формулы (4.2.7) следует числовое равенство Det(A´)=det(A), то есть величина определителя матрицы оператора не зависит от выбора базиса. Действительно, используя свойства определителей, получаем
![]() .
.
Пример. В
базисе е1, е2 преобразование
имеет матрицу А=![]() .
Найти матрицу этого преобразования в
новом базисе
.
Найти матрицу этого преобразования в
новом базисе
![]()
Решение.
Составим матрицу перехода к новому
базису, располагая координаты векторов
е1´=(1,-1), е2´=(3,2) по столбцам,
С=
![]() .
Вычислим обратную матрицу
.
Вычислим обратную матрицу
С-1=![]()
Матрица оператора А в новом базисе будет получена по формуле (4.2.7):

Ответ. Матрица
оператора в новом базисе равна
 .
.