

Білокриницький С. М. Геодезія
.pdf181
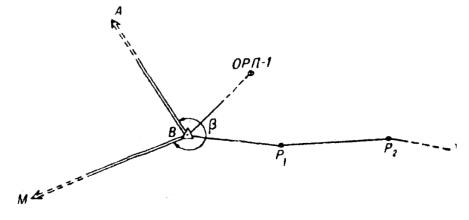
якщо сума α+β>540º, то необхідно від отриманої суми відняти 540º.
Рис. 67. Обчислення дирекційних кутів
Кутова нев’язка теодолітного ходу
Значення дирекційного кута вихідного кінцевого напрямку CD, обчислене за вищезазначеними формулами, як правило, не дорівнюватиме його значенню, взятому з каталогу (наданому значенню). Це викликано тим, що вимірювання кутів повороту β супроводжується помилками, які виникають через конструктивні особливості приладів, вплив атмосферної рефракції і кривизни Землі, досвід спостерігача і т. ін. Тому для кінцевого вихідного напрямку будемо мати два значення дирекційного кута: одне – обчислене і друге – вихідне, які в загальному випадку не будуть рівними між собою.
Різниця між обчисленим (αобч.) і наданим (αвих.) значеннями дирекційного кута вихідного кінцевого напрямку називається кутовою нев’язкою теодолітного ходу.
Отже,
|
обч. вих. , |
де ωβ – величина кутової нев’язки теодолітного ходу.

182
Знак кутової нев’язки визначається за правилом: «є – мінус повинно бути», тобто значення величини, отриманої за результатами безпосередніх вимірювань, мінус вихідне або теоретичне її значення.
Зрозуміло, що величина кутової нев’язки не може бути якимось нескінченим числом, тобто вона повинна мати своє допустиме значення.
Допустиме значення кутової нев’язки обчислюється за формулою
доп. 1/  п,
п,
де п – кількість кутів у ході.
Значення числа перед коренем (у нас ± 1') буде залежати від того, з якою точністю ми прокладаємо полігонометричний (теодолітний) хід. Наприклад, для полігонометрії 4-го класу це значення дорівнює ± 5″. Значення ± 1' прийнято для теодолітних ходів, які прокладаються з метою визначення координат межових знаків земельних ділянок.
Урівноваження кутів повороту
Розходження між обчисленим і наданим значеннями дирекційного кута вихідного кінцевого напрямку ходу пояснюється помилками вимірювань кутів β. Задача вирівнювальних обчислень полягає у проведенні таких виправлень усіх виміряних кутів, які б дозволили усунути це розходження, тобто щоби нев’язка ωβ дорівнювала нулю.
Отже, урівноваження кутів повороту полягає в усуненні кутової нев’язки ωβ шляхом знаходження таких поправок v1, v2, ..., vп до виміряних значень кутів β1, β2, …, βп, щоби задовольнялось рівняння
v1 + v2 + …+ vп = – ωβ,
тобто сума шуканих поправок до виміряних значень кутів повороту повинна дорівнюватися кутовій нев’язці ходу, зі зворотним знаком.

183
Виправлені кути повороту називаються врівноваженими кутами, а сам процес отримання урівноважених кутів – урівноваженням кутів повороту.
При урівноваженні теодолітних ходів застосовується спрощений спосіб врівноваження, при якому вважають, що
v1 = v2 = … = vп = v.
Тоді
vп = – ωβ,
звідси
v n ,
де п – кількість кутів повороту.
Отже, процес врівноваження кутів в теодолітному ході полягає в розподіленні кутової нев’язки ω, взятої зі зворотним знаком, порівну в усі виміряні кути.
Якщо кутова прив’язка ходу здійснена до двох вихідних сторін, наприклад ВМ і ВА (рис. 68), то, перш ніж перейти до врівноваження кутів ходу, рекомендується ввести поправки в напрямки, виміряні по вихідним сторонам. Необхідність введення цих поправок викликана невідповідністю виміряного значення кута АВМ βвим., (рис. 68) його значенню, обчисленому за дирекційними кутами напрямків ВМ і ВА, поданим у каталозі. Ця невідповідність викликає розходження в шуканих значеннях дирекційних кутів сторін ходу. Наприклад, значення дирекційного кута напрямку ВР1, обчислене за вихідним напрямком ВА, не буде дорівнюватися значенню дирекційного кута того ж напрямку, але обчисленому за вихідним напрямком ВМ.
Якщо прийняти βобч. за істинне значення кута і вважати виміряні напрямки ВА і ВМ рівноточними, то врівноваження напрямків, виміряних по вихідним сторонам, зведеться до знаходження різниці ∆ = βвим. − βобч. і розподілу її порівну на виміряні напрямки МВА і МВМ, щоби βвим. дорівнював βобч.
184
Рис. 68. Урівноваження напрямків на станції
Обчислення урівноважених значень дирекційних кутів
Після того, як отримані врівноважені значення виміряних кутів ходу, приступають до обчислення врівноважених значень дирекційних кутів його сторін. Обчислення здійс-
нюється за формулою
αі = αі-1 + βі ± 180º,
де αі – дирекційний кут з точки і на точку і+1; αі-1 – дирекційний кут з точки і−1 на точку і;
βі – врівноважене значення дирекційного кута на точці і. Якщо врівноваження кутів повороту виконано правильно, то обчислене значення αп дирекційного кута кінцевого вихідного напрямку повинно дорівнювати його наданому значенню. Збіжність результатів, тобто відсутність нев’язки, служить контролем правильності врівноваження
кутів повороту й обчислення дирекційних кутів.
Можна в цьому питанні рухатись і іншим шляхом. Після того, як обчислені значення дирекційних кутів і поправки до кутів поворотів, врівноважене значення дирекційних кутів може бути отримане шляхом введення поправок в їх обчислені значення. При цьому значення врівноваженого дирекційного кута збільшується (зменшується) не тільки на величину поправки для даного дирекційного кута, але й на суму попередніх поправок.
185
15.3. Обчислення координат точок ходу
Обчислення приростків координат
Приростки прямокутних координат обчислюється за формулами прямої геодезичної задачі.
∆х = d·cosα; ∆y = d·sinα,
де d – відстань між точками теодолітного ходу; α – дирекційний кут сторони ходу.
Знак приростків координат визначається знаком косинуса і синуса дирекційного кута.
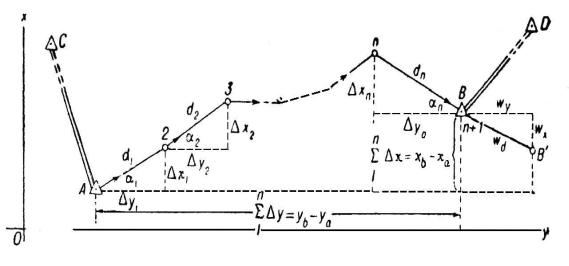
Визначення лінійної нев’язки ходу
На основі прямої геодезичної задачі координати точок повороту розімкнутого полігонометричного ходу (рис. 69) можна обчислити за формулами
х2 = ха + ∆х1; у2 = уа + ∆у1; |
|
||
х3 = х2 + ∆х2; у3 = у2 + ∆у2; |
(2.1) |
||
хп = хп-1 + ∆хп-1; уп = уп-1 + ∆уп-1; |
|||
хb = хп + ∆хп; уb = уп + ∆уп. |
|
||
Підсумовуючи ці рівняння, отримаємо |
|
||
n |
n |
n |
|
x xb x xa x ; |
|
||
2 |
2 |
1 |
|
n |
n |
n |
|
y yb y ya y |
, |
||
2 |
2 |
1 |
|
звідси |
|
n |
|
|
|
|
|
|
xb xa x ; |
|
|
|
|
1 |
|
|
|
n |
|
|
yb ya |
y , |
(2.2) |
1
або
n
x xb xa ;
1
186
n |
|
y yb ya . |
(2.3) |
1 |
|
Отже, різниця наданих координат кінцевого і початкового вихідних пунктів розімкнутого полігонометричного ходу повинна дорівнювати сумі приростків координат цього ходу.
Рис. 69. Визначення лінійної нев’язки ходу Рівняння (2.2) виражають геометричні умови, які пови-
нен задовольняти розімкнутий полігонометричний хід, прокладений між двома вихідними пунктами. Ці умови називаються відповідно умовою абсцис і умовою ординат.
Унаслідок впливу помилок кутових і лінійних вимірів у ході ці умови задовольнятися не будуть, тобто величини правих частин рівнянь (2.2) не будуть дорівнювати вихідним координатам кінцевого пункта, а відповідатимуть координатам деякої точки В', розташованої поблизу вихідного пункта В.
Звідси випливає, що рівняння (2.3) у загальному випадку не будуть задоволені, тобто практично будемо мати
n |
|
x (xb xa ) x ; |
|
1 |
|
n |
|
y ( yb ya ) y . |
(2.4) |
1 |
|

187
Застосовуючи позначення |
|
|
xвих xb xa ; |
yвих yb ya ; |
|
n |
n |
|
xобч x ; |
yобч y, |
(2.5) |
1 |
1 |
|
рівнянням (1.4) можна надати вигляд |
|
|
x xобч xвих ; |
|
|
y yобч yвих . |
(2.6) |
|
Величини ωх і ωу, які виражають різниці вихідних і обчислених значень координат кінцевого пункту ходу, називаються нев’язками приростків координат.
Відрізок ВВ' = ωd (рис. 69) показує абсолютну лінійну нев’язку ходу, а проекції цього відрізку ωх і ωу на осі координат складають нев’язки приростків координат.
Зрозуміло
d  x 2 y 2 .
x 2 y 2 .
Величина абсолютної лінійної нев’язки ωd залежить від точності кутових і лінійних вимірів, а також від кількості точок повороту і довжини ходу.
Для оцінки точності полігонометричного ходу лінійну нев’язку звичайно виражають у відносній формі, тобто визначають, яку частку всієї довжини ходу складає абсолютна нев’язка. Щоби отримати відносну лінійну нев’язку, потрібно поділити абсолютну лінійну нев’язку ходу на довжину цього ходу.
Відносну лінійну нев’язку хода прийнято виражати у вигляді простого дробу, чисельник якого дорівнює одиниці, а знаменник являє собою число Ν, що показує, в скільки разів абсолютна нев’язка менше від довжини ходу.
Отже,
N1 dd ,
188
де [d] – довжина полігонометричного ходу, яка дорівнює сумі довжин його сторін.
Врівноваження приростків і обчислення координат точок ходу
Якщо відносна нев’язка ходу не перевищує встановленого допуску, то вважають, що польові вимірювання й обчислення приростків координат зроблені правильно і приступають до врівноваження обчислених приростків.
Урівноваження приростків зводиться до визначення таких поправок v∆x і v∆y, при яких суми обчислених прирост-
n |
n |
|
ків x |
і y |
дорівнювали б різницям відповідних ко- |
1 |
1 |
|
ординат кінцевої і початкової точок ходу (xb − xa і уb − ya), тобто виконувалися б рівняння:
n |
|
|
( x v x ) xb xa ; |
|
|
1 |
|
|
n |
|
|
( y v y ) yb ya , |
|
|
1 |
|
|
або |
|
|
n |
n |
|
x v x (xb xa ) 0; |
|
|
1 |
1 |
|
т |
n |
|
y v y ( yb ya ) 0. |
(2.7) |
|
1 |
1 |
|
Якщо врахувати вираз (2.4), то рівняння (2.7) отрима- |
||
ють вигляд: |
|
|
n |
|
|
v x x ; |
|
|
1 |
|
|
n |
|
|
v y y . |
(2.8) |
|
1 |
|
|
Але рівняння (2.8) невизначені: їх задовольняє будьякий підбір поправок, суми яких дорівнюють відповідним
189
нев’язкам із протилежними знаками. Щоби не створювати значних різниць довжин ліній і напрямків від фактичних на місцевості, при спрощеному способі врівноваження нев’язки приростків координат розподіляється пропорційно довжинам сторін ходу.
Нев’язки ωx і ωy поділяють на довжину ходу [d], тобто отримають поправки до приростків ∆x і ∆y на одиницю довжини хода. Збільшуючи ці поправки на число одиниць кожної сторони, отримують поправки до приростків по осі абсцис і осі ординат.
Отже, формули для обчислення поправок до приростків координат будуть мати такий вигляд:
v x1 |
x |
|
|
d d1 |
; |
||
v x2 |
x |
|
|
d d2 |
; |
||
……………. |
|
|
|
v xn |
x |
|
|
d dn ; |
|||
Створивши алгебраїчні суми
v y1 dy d1 ; v y2 dy d2 ;
……………
v yn dy dn .
x v x і y v y , отри-
мують врівноважені значення приростків координат.
За врівноваженими значеннями приростків координат послідовно обчислюють координати всіх точок повороту, починаючи з початкового вихідного пункту. Ці обчислення здійснюють за формулами (2.1), які набувають вигляду:
xі хі 1 ( хі 1 v xs 1 );
yі уі 1 ( уі 1 v ys 1 ),
тобто координати наступної точки ходу дорівнюють координатам його попередньої точки, з доданими до них врівноваженими значеннями відповідних приростків.
190
Обчислення вважають правильними, якщо обчислені координати кінцевого вихідного пункту дорівнюють його наданим координатам.
Обчислення висот точок ходу
При прокладанні теодолітних ходів висоти пунктів звичайно визначаються із тригонометричного нівелювання. Слід зазначити, що при прокладанні теодолітних ходів висоти точок можуть і не визначатися. Це залежить від того, яка задача розв’язується. При складанні кадастрових планів здебільшого визначається тільки планове положення точок.
У тих випадках, коли визначається й висотне положення точок, то висоти точок обчислюються в такій послідовності.
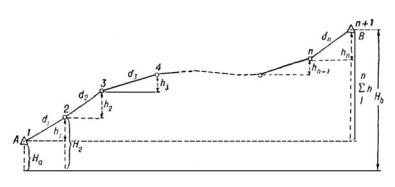
Знаючи абсолютну висоту На початкової точки ходу й перевищення h1, h2, …, hп, можна обчислити абсолютні висоти всіх точок ходу.
Для ходу, зображеного на рис. 70, маємо
H 2 H a h1 ; H3 H 2 h2 ;
……………..
H b| H n hn ,
отже,
n
Hb| H a h.
1
Рис. 70. Визначення висот точок полігонометричного ходу