

Крыло чертежи_1 / Фюзеляж / 561479
.pdf
|
|
Размещено на http://www.allbest.ru/ |
|||||
где t1 |
– шаг крепежных элементов соединения, t1 20 мм ; |
||||||
в |
– предел прочности материала стенки; |
|
|
||||
c |
– |
коэффициент, принимающий значение 0,22 для односторонних |
|||||
заклепок. |
|
|
|
|
|
|
|
Результаты в таблице 4.8. |
|
|
|
||||
Таблица 4.8 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 сечение |
2 сечение |
3 сечение |
|
|
|
|
|
|
|
|
|
|
|
|
отр |
9004.5 |
7950.2 |
1922.17 |
|
|
|
|
Pз(б) (Н) |
|
|
|
|
|
|
|
d( мм ) |
5 |
4 |
3.5 |
|
|
|
|
|
|
|
|
|
Соединение пояса с панелью Крепежные элементы продольных соединений поясов и панелей крыла
нагружается потоком касательных усилий, возникающих в результате восприятия кессонной частью крыла крутящего момента. Если известен крутящий момент, усилие среза, действующее на один крепежный элемент,
определяют по формуле:
Pср |
|
M кр t2 |
, (4.9) |
|
|||
з(б ) |
|
m |
|
|
|
||
где M кр – крутящий момент в расчетном сечении крыла;
t2 – шаг крепежных элементов в соединении пояса с панелью;
– удвоенная площадь кессонной части крыла; m – число рядов крепежных элементов m=1;
– коэффициент неравномерности, принимаемый равным 1,1.
Величина крутящего момента может быть определена как
Размещено на http://www.allbest.ru/
M кр Q xц.ж xц.д , (4.10)
где xц.ж – положение центра жесткости крыла в расчетном сечении;
xц.д – положение центра давления крыла в расчетном сечении.
Ω=2(Н1+Н2)/2 * b2.
Результаты в таблице 4.8.
Таблица 4.9
|
1 сечение |
2 сечение |
3 сечение |
|
|
|
|
M кр |
934,8 |
768,11 |
11,76 |
|
|
|
|
(кНм) |
|
|
|
|
|
|
|
Ω(ммІ |
4261.3 |
2432 |
528.4 |
|
|
|
|
ср |
6824.3 |
5932.8 |
1239.8 |
Pз(б ) (Н) |
|
|
|
d( мм ) |
6 |
6 |
3 |
|
|
|
|
Материал |
Д16П |
Д16П |
Д16П |
|
|
|
|
4.1.5 Выводы По конструктивно-силовой схеме лонжерон балочного типа. Он
представляет собой двухпоясную балку со стенкой, подкрепленной стойками.
По количеству стенок лонжерон относится к одностеночным. По форме поперечного сечения лонжерон относится к двутавровым. По технологическому признаку лонжерон относится к сборным и является клепаной конструкцией. Самим нагруженным является бортовое сечение, а
наименьшее нагружение имеет сечение в конце крыла. Поэтому и размеры лонжерона уменьшаются по мере удаления от борта фюзеляжа.
Размещено на http://www.allbest.ru/
4.2 Разработка конструкции силовых элементов механической проводки системы управления РВ
4.2.1 Анализ схем системы управления и конструктивных особенностей их выполнения на самолетах заданного типа
При проектировании систем управления рулевыми поверхностями самолета решается целый комплекс задач, связанных с обеспечением разнообразных требований, предъявляемых к управлению с точки зрения его назначения, надежности и безопасности в работе, эксплуатации и производства.
Первая задача – это обеспечение точности передаваемых команд, так как из-за большой протяженности канала механического управления (КМУ)
передаваемый сигнал претерпевает значительные изменения, как по амплитуде, так и по фазовому сдвигу, что сказывается на показателях управляемости.
Вторая задача связана с обеспечением достаточной долговечности и надежности всех элементов каналов управления.
Третьей задачей является выбор конструктивно-технологических параметров канала управления, при которых не возникают резонансные явления.
Управлением самолетом называется процесс изменения сил и моментов, необходимых для полета самолета по заданной траектории, а
совокупность устройств, обеспечивающих процесс управления, составляет систему управления.
При разработке систем основного управления, проектируемого самолѐта, необходимо обеспечить требования Авиационным правилам АП25:
при отклонении органов управления (рулей, элеронов) усилия в ручке, штурвале и педалях должны возрастать плавно и быть направлены в сторону, противоположную движению ручки, штурвала и педалей. Величина
Размещено на http://www.allbest.ru/
усилий не должна превышать пределов, предусмотренных нормами
прочности;
должна быть обеспечена независимость действия рулей высоты и элеронов: отклонение ручки ил колонки штурвала при управлении рулем высоты не должно вызывать отклонение элеронов и наоборот;
при деформациях крыла, фюзеляжа и оперения должна быть исключена возможность заклинивания (заедания и зажима) проводки и механизмов управления;
ручки, штурвалы и педали, все рычаги и тяги управления должны быть удобно размещены в кабине. Механизм ножного управления должен допускать его регулировку;
углы отклонения рулевых поверхностей должны обеспечивать возможность полета на всех требуемых полетных и посадочных режимах,
причем должен быть предусмотрен некоторый запас рулей. Механизмы
управления должны иметь ограничительные упоры предельных углов
отклонения;
система управления должна быть надежной на всех режимах
полета;
тяги или тросы проводки не должны попадать в резонансные
колебания;
вся система проводки управления должна иметь минимальное трение и люфты в сочленениях, и возможно меньший износ трущихся поверхностей;
детали проводки управления, находящиеся в пассажирских и багажных помещениях, должны быть защищены от поломки и зажима.
4.2.2 Разработка трассировки, размещения и типа проводки системы управления, разработка ее кинематической схемы
При разработке системы управления рулем высоты (РВ),
проектируемого самолета, используем полуавтоматическую систему
Размещено на http://www.allbest.ru/
управления. Система такого вида облегчит пилоту управление самолетом и повысит качество управления.
Полуавтоматические системы включают в себя: штурвальную колонку,
отклонением которой пилот вводит в систему управляющие сигналы и осуществляет их дозировку; орган управления (РВ), отклонение которых в соответствии с управляющими сигналами (отклонением штурвальной колонки) создает необходимые для изменения траектории полета силы и моменты; проводку управления, соединяющую штурвал с органами управления.
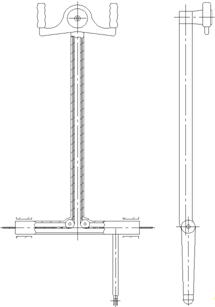
Штурвальная колонка, показанная на рис.4.1, служит для управления рулем высоты (РВ) неманевренных самолетов (пассажирских) отклонением колонки управления "от себя" и "на себя" и элеронами – поворотом штурвала
"влево-вправо".
В системе управления большую роль играет конструкция проводки.
Она может быть гибкой, жесткой и смешенной.
Рисунок 4.1 – Штурвальная колонка
На современных самолетах наиболее широко применяется жесткая проводка управления с поступательным движением тяг. Элементами жесткой
Размещено на http://www.allbest.ru/
проводки являются тяги, валы, качалки, рычаги, направляющие устройства и кронштейны.
При разработке системы управления, проектируемого самолета, будем использовать жесткую проводку, так как она имеет меньшее трение в сочленениях, не пружинит и не дает упругого люфта, что делает управление более чувствительным.
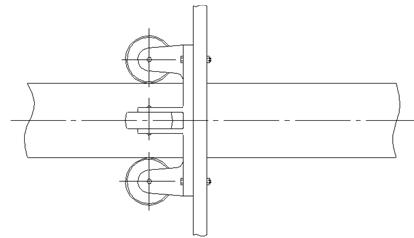
В качестве направляющих устройств для жесткой проводки управления применим направляющие, конструктивно состоящие из обоймы с четырьмя роликами.
Рисунок 4.2.– Роликовые направляющие для жесткой проводки управления
Система управления бустерная с гидравлическими приводами.
Гидроусилитель представляет собой гидравлическую следящую систему и состоит из исполнительного механизма, следящего элемента и связи между ними. Система обратимая, то есть большая часть шарнирного момента воспринимается гидроусилителем и некоторая доля воспринимается лѐтчиком.
Так же одной из наиболее важных и трудоѐмких задач проектирования системы основного управления является определение его передаточных свойств, позволяющих установить требуемую взаимосвязь между
Размещено на http://www.allbest.ru/
перемещением командного рычага и перемещением рулевой поверхности, а
также обеспечение рекомендуемых величин усилий, прикладываемых лѐтчиком к командному рычагу.
Учитывая выше сказанное и конструкцию самолета, составляем кинематическую схему системы управления рулем высоты.
4.2.3 Кинематический расчет СУ. Определение нагрузок в тягах,
качалках и командном рычаге системы управления
Определим коэффициент кинематической передачи кинематической
схемы при нейтральном положении штурвальной колонки.
Отклоним командный рычаг на небольшой угол d кр . Пусть
соответствующее этому углу перемещение точки командного рычага
(штурвала), к которой приложено усилие летчика Pкр , в направлении
действия этого усилия будет dxкр , а отклонение рулевой поверхности (руля высоты) образует угол d рв .
На отклоненной рулевой поверхности возникнет шарнирный момент
Mшрн от аэродинамических сил.
Применив принцип возможных перемещений и приравняв нулю сумму работ всех активных сил и моментов системы на своих перемещениях,
получим выражение:
P dx |
|
|
P dx M |
шрн |
d |
рв |
|
|
M |
j |
d |
j |
0, (4.11) |
|
|
кр кр |
|
i i |
|
|
|
|
|
|
|
||||||
|
|
i |
|
|
|
|
|
j |
|
|
|
|
|
|
|
где dxi |
- проекции возможных линейных перемещений всех активных |
||||||||||||||
сил Pi (кроме Pкр ) на направление |
этих |
сил; d j |
- возможные |
угловые |
|||||||||||
перемещения активных моментов M j |
|
(кроме Mшрп ). Приняв, что в проводке |
|||||||||||||
управления |
нет |
механизмов |
|
и |
устройств, через |
которые на |
систему |
||||||||

Размещено на http://www.allbest.ru/
передаются дополнительные, помимо Pкр и Mшрп , активные силы и моменты, а
трением в подвижных звеньях управления можно пренебречь, тогда:
Pкр dX кр Mшрп d рп 0,
Откуда
Pкр d рп Mшрп
dXкр
Применив правило знаков и разделив обе части выражения на M шрп ,
получим:
Pкр |
|
d рп |
Kс |
|
Mшрп |
dXкр |
|||
|
|
где Kс - коэффициент кинематической передачи.
Необходимо обеспечить такое передаточное отношение, при котором
будет обеспечиваться заданное отклонение рулевой поверхности, при рекомендуемых перемещениях ручки управления.
В таблице 4.10 приведены |
ориентировочные значения Kс согласно |
|||||
статистических данных. |
|
|
|
|
|
|
Таблица 4.10 – Значения Kс |
и эксплуатационного усилия на штурвал |
|||||
|
|
|
|
|
|
|
|
Величина |
kc градусы милиметры |
0.1-0.15 |
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
kc радианы метры |
1.75 –2.6 |
|
||
|
ил и |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эксплуатационное усилие [17] H |
1335 |
|
|||
|
|
|
||||

Размещено на http://www.allbest.ru/
Руль высоты отклоняется на следующие углы: вверх на 30о; вниз на 15о.
Согласно Авиационных правил (АП) рекомендуемое перемещение ручки командного рычага в направлении "на себя" (при этом рулевая поверхность отклоняется вверх) dX кр =250мм, следовательно, передаточное отношение системы:
Kс |
d рп |
|
30 |
|
2,1 |
-1 |
||
|
|
|
|
м |
||||
dXкр |
180 |
0,25 |
||||||
|
|
|
|
|||||
Полученное передаточное отношение соответствует рекомендациям,
приведенным в пособии.
Передаточное отношение системы зависит от передаточного отношения всех звеньев системы:
К с К кр К1 К 2 ... К i |
1 |
,(4.12) |
|
||
|
rрп |
|
Применив равноплечие качалки, можно упростить выражение (4.14):
К с К кр |
|
1 |
, К кр |
rккр |
|
|
rрп |
rкр |
|||||
|
|
|
||||
где: Ккр |
|
– передаточное отношение командного рычага; rкр = 720мм – |
||||
длина штурвальной колонки; rккр = 240мм – длина кронштейна штурвальной колонки.
К кр 720240 0,333

Размещено на http://www.allbest.ru/
Таким образом, потребное плечо рулевой поверхности rрп ;
rрп Ккр 0,333 / 2,1 0,16 м
К
с
Длина плеч качалок не влияет на кинематический расчет. Плечи выбираются из условия обеспечения минимальных люфтов системы. По статистическим данным выбраны плечи 150мм. Расчетное усилие примем:
Pкр Pр Pэ f 1335 1,5 2002,5 Н
где f - коэффициент безопасности f 1,5 .
4.2.4 Обоснование выбора конструкционных материалов и проектировочные расчеты тяги и качалки управления. Разработка конструкции характерных сечений и узлов крепления
Проектирование тяги системы управления Будем считать, что тяга из сплава алюминия Д16Т основные
характеристики которого приведены в таблице 4.12, а также она имеет в сечении кольце образный вид.
Таблица 4.11 – Характеристики сплава Д16Т
Марка |
в |
, МПа |
0.2 , МПа |
E 10 |
4 |
, МПа |
, г / см |
3 |
|
|
|
||||||
Д16Т |
435 |
280 |
7.2 |
|
|
2.85 |
|
|
|
|
|
|
|
|
|
|
|
Рассмотрим тягу номер пять, для нее максимальное сжимающее усилие
3503 Н. Задача выбора размеров сжатого трубчатого элемента может быть описана тремя следующими уравнениями: