

Министерство образования и науки Украины
ОДЕССКАЯ НАЦИОНАЛЬНАЯ МОРСКАЯ АКАДЕМИЯ
Конспект лекций
УПРАВЛЕНИЕ СУДНОМ
Одесса – 2007
СОДЕРЖАНИЕ |
|
ВВЕДЕНИЕ ........................................................................................................................................ |
4 |
РАЗДЕЛ 1. ПОЛЮС ПОВОРОТА И ЕГО УЧЕТ ПРИ МАНЕВРИРОВАНИИ ......................... |
5 |
1.1. Полюс поворота ...................................................................................................................... |
5 |
1.2. Воздействие течения на маневренные характеристики судна .......................................... |
8 |
РАЗДЕЛ 2. ШВАРТОВНЫЕ ОПЕРАЦИИ ................................................................................... |
22 |
2.1. Этапы швартовной операции ............................................................................................... |
22 |
2.2. Швартовные операции в порту........................................................................................... |
23 |
2.3. Безопасная стоянка судна на швартовах........................................................................... |
25 |
2.4. Определение силы навала судна на причал при швартовке ............................................. |
26 |
РАЗДЕЛ 3. ТЕХНОЛОГИЯ РАБОТ ПО СНЯТИЮ СУДНА С МЕЛИ .................................... |
32 |
3.1. Действия экипажа ................................................................................................................. |
32 |
3.2. Расчеты по снятию судна с мели ........................................................................................ |
33 |
3.3. Способы снятия судна с мели ............................................................................................. |
38 |
3.4. Самостоятельное снятие судна с мели............................................................................... |
39 |
3.5. Снятие с мели с помощью другого судна........................................................................... |
39 |
3.6. Методика расчета дозированного рывка при снятии судна с мели ................................ |
41 |
РАЗДЕЛ 4. УПРАВЛЕНИЕ СУДНОМ В УЗКОСТИ, НА МЕЛКОВОДЬЕ И В КАНАЛЕ .... |
45 |
4.1. Характеристики узкости, мелководья и канала ................................................................ |
45 |
4.2. Влияние мелководья на скорость и другие маневренные характеристики судна .......... |
45 |
4.3. Расчѐт проседания судна при плавании на мелководье ................................................... |
47 |
РАЗДЕЛ 5. БУКСИРОВОЧНЫЕ ОПЕРАЦИИ ............................................................................ |
50 |
5.1. Основные требования к буксировке................................................................................... |
50 |
5.2. Расчет тягового усилия и скорости буксировки ............................................................... |
51 |
5.3. Буксировка аварийных судов.............................................................................................. |
56 |
РАЗДЕЛ 6. ЯКОРНЫЕ ОПЕРАЦИИ ............................................................................................ |
59 |
6.1. Силы, действующие на судно, стоящее на якоре ............................................................. |
59 |
6.2. Держащая сила якорного устройства.................................................................................. |
60 |
6.3. Обоснование безопасной якорной стоянки ....................................................................... |
61 |
6.4. Выбор места якорной стоянки ............................................................................................ |
63 |
6.5. Способы постановки судна на якоря.................................................................................. |
64 |
6.6. Съемка с якоря ..................................................................................................................... |
65 |
6.7. Стоянка судов на бочках ..................................................................................................... |
66 |
РАЗДЕЛ 7. ПЛАВАНИЕ СУДНА ВО ЛЬДАХ ............................................................................ |
68 |
7.1. Подготовка судна для плавания во льдах .......................................................................... |
68 |
7.2. Плавание и управление судном во льдах. ......................................................................... |
69 |
7.3. Самостоятельное плавание во льдах .................................................................................. |
70 |
7.4. Плавание под проводкой ледоколов ................................................................................... |
70 |
7.5. Выбор параметров движения каравана во льду ................................................................. |
72 |
РАЗДЕЛ 8. ОБЩИЕ СВЕДЕНИЯ ОБ УПРАВЛЕНИИ СУДНОМ............................................. |
74 |
8.1. Судно как объект управления .............................................................................................. |
74 |
8.2. Силы и моменты, действующие на судно .......................................................................... |
75 |
8.3. Система уравнений движения судна в горизонтальной плоскости ................................ |
75 |
8.4. Маневренные характеристики судна .................................................................................. |
77 |
8.5. Требования к содержанию информации о маневренных характеристиках судна.......... |
77 |
РАЗДЕЛ 9. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА........................... |
81 |
9.1. Общие сведения об инерционно-тормозных свойствах судна ......................................... |
81 |
9.2. Торможение судна ............................................................................................................... |
81 |
2
9.3. Вывод расчетных формул для определения инерционно-тормозных характеристик |
|
судна .............................................................................................................................................. |
83 |
9.4. Определение среднего значения упора гребного винта.................................................... |
87 |
9.5. Определение коэффициента пропорциональности μ ....................................................... |
89 |
9.6. Определение коэффициента присоединенной массы, k.................................................... |
90 |
9.7. Практический расчет пути и времени торможения при реверсе двигателя газовоза |
|
CHACONIA с полного морского хода на полный ход назад (117 – 97 об./мин) ................... |
91 |
РАЗДЕЛ 10. АЛЬТЕРНАТИВНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК |
|
ТОРМОЖЕНИЯ СУДНА ................................................................................................................ |
95 |
10.1. Обоснование математической модели ............................................................................. |
95 |
10.2. Влияния попутного и встречного течения на длину тормозного пути судна ........ |
100 |
10.3. Расчет безопасной скорости и минимально-допустимого расстояния сближения |
|
судов с учетом тормозних характеристик и наличия радиолокационной информации ..... |
103 |
РАЗДЕЛ 11. ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК РАЗГОНА И ПОДТОРМАЖИВАНИЯ |
|
СУДНА............................................................................................................................................ |
106 |
11.1 Обоснование математической модели метода ................................................................ |
106 |
11.2. Определение времени и скорости разгона судна на задний ход ................................. |
111 |
РАЗДЕЛ 12. УПРАВЛЯЕМОСТЬ СУДНА ................................................................................ |
114 |
12.1. Устойчивость на курсе и поворотливость ...................................................................... |
114 |
12.2. Диаграмма управляемости .............................................................................................. |
116 |
12.3. Движение судна под влиянием переложенного руля ................................................... |
118 |
12.4. Влияние параметров корпуса и руля на управляемость судна.................................... |
123 |
12.5. Совместное влияние сил гребного винта и руля при маневрировании ....................... |
124 |
РАЗДЕЛ 13. ВЛИЯНИЕ ВЕТРА И ВОЛНЕНИЯ НА УПРАВЛЯЕМОСТЬ СУДНА ............ |
128 |
13.1. Аэродинамические и гидродинамические силы, действующие на судно ................... |
128 |
13.2. Условие сохранения управляемости при ветре и волнении ........................................ |
131 |
13.3 Аналитический расчет аэродинамической и гидродинамической силы, а также |
|
поперечной силы руля, действующие на судно ...................................................................... |
133 |
РАЗДЕЛ 14. УПРАВЛЕНИЕ СУДНОМ ПРИ ОБГОНЕ И РАСХОЖДЕНИИ НА |
|
МЕЛКОВОДЬЕ И В КАНАЛАХ .................................................................................................. |
136 |
14.1. Гидродинамическое взаимодействие судов ................................................................... |
136 |
14.2. Управление судном в канале .......................................................................................... |
138 |
РАЗДЕЛ 15. МАНЕВРИРОВАНИЕ ПРИ ПАДЕНИИ ЧЕЛОВЕКА ЗА БОРТ. МАНЕВР |
|
«КООРДОНАТ». ЭКСТРЕННОЕ ТОРМОЖЕНИЕ ДЛЯ УКЛОНЕНИЯ ОТ ОПАСНОСТИ140 |
|
15.1. Маневры судна при спасании человека, упавшего за борт.......................................... |
140 |
15.2. Выбор эффективного маневра для уклонения от опасности ........................................ |
142 |
РАЗДЕЛ 16. УПРАВЛЕНИЕ СУДНОМ В ШТОРМ ................................................................ |
146 |
16.1. Подготовка судна к плаванию в штормовую погоду ................................................... |
146 |
16.2. Влияние штормовых условий на мореходные качества судна.................................... |
146 |
16.3. Характеристики волнения ................................................................................................ |
147 |
16.4. Универсальная штормовая диаграмма Ю.В. Ремеза .................................................... |
149 |
16.5. Способы штормования .................................................................................................... |
150 |
ЛИТЕРАТУРА................................................................................................................................ |
152 |
3
ВВЕДЕНИЕ
Дисциплина «Управление судном» является одной из ведущих в подготовке бакалавров судовождения. Ее содержание базируется на теоретических и практических исследованиях в области математики, теоретической механики и специальных дисциплин. В ней сконцентрировано решение задач управления судном в различных условиях плавания и маневрирования.
За последние десятилетия значительно возросли водоизмещения судов, мощности их энергетических установок, возросли скорости, появились суда с новыми методами эксплуатации и способами управления. На судах появилась быстродействующая вычислительная техника. Это повлекло за собой необходимость совершенствования теории и практики управления судном.
Изучение приведенных в учебном пособии вопросов даст необходимую теоретическую базу для последующего анализа и накопления опыта управления судном, совершенствования профессионального мастерства судоводителя.
Учебное пособие разработано в соответствии с учебным планом подготовки бакалавров судовождения и программой учебной дисциплины «Управление судном». Оно может быть полезно также специалистам, работающим на судах и в службах мореплавания.
4
РАЗДЕЛ 1.
ПОЛЮС ПОВОРОТА И ЕГО УЧЕТ ПРИ МАНЕВРИРОВАНИИ
1.1. Полюс поворота
Судоводителям хорошо известно, что при движении судна передним ходом полюс (центр) его поворота находится в носовой части там, где угол дрейфа при циркуляции равен нулю. Максимальное значение угла дрейфа будет находиться в кормовой оконечности судна и, следовательно, корма будет разворачиваться с большим диаметром циркуляции. Этот факт следует учитывать при маневрировании в стесненных акваториях и оберегать корму от навала на какие-либо препятствия (например, причал, другое судно и т.п.).
Если заранее не оговорено, то в каждом приведенном ниже примере подразумевается, что судно находится на ровном киле в условиях штилевой погоды и при отсутствии волнения. При таких обстоятельствах отсутствует воздействие внешних сил и полюс поворота совпадает с центром тяжести судна, который приблизительно находится на мидельшпангоуте (см. рис. 1.1,а).
Рассмотрим воздействие на судно двух сил: продольную силу, создающую движение судна на передний ход, и гидродинамическую силу или силу сопротивления движению судна на переднем ходу. Эти две силы должны быть сбалансированы, тогда полюс поворота переместится в носовую часть судна. Приближенно можно считать, что при установившемся движении полюс поворота будет находиться в точке, отстоящей от форштевня на ¼ длины судна
( см. рис. 1.1,б).
Изменим ситуацию на противоположную. Судно движется задним ходом. Сила движения судна задним ходом должна быть сбалансирована силой сопротивления корпуса. Теперь полюс поворота переместится в кормовую часть судна и будет находиться в точке, отстоящей от ахтерштевня приблизительно на ¼ длины судна (см. рис. 1.1, в).
Следует отметить, что на положение полюса поворота могут воздействовать инерционные силы, скорость движения судна, форма корпуса и т.п. Однако, приведенное выше и проиллюстрированное на рисунках вполне адекватно для практических целей.
5
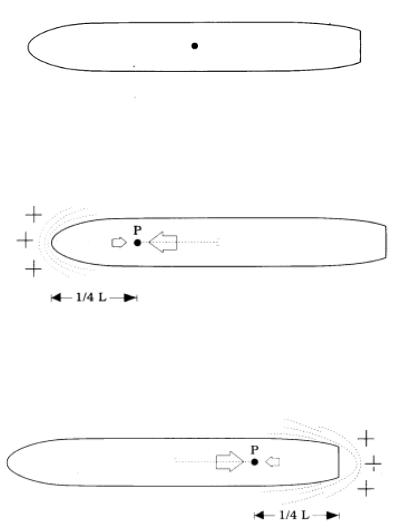
а) Судно остановлено.
G
б) Дан передний ход.
G
в) Дан задний ход.
G
Рисунок 1.1 – Полюс поворота и его положение на судне
Кроме знания места нахождения полюса поворота, важно знать также характер его перемещения под воздействием сил, разворачивающих судно. Такими силами являются: сила перекладки руля, силы при работе подруливающего устройства и буксиров, интерактивные и инерционные силы, а также силы ветра и течения.
В качестве примера рассмотрим судно длиной 160 метров. Оно остановлено относительно воды, а с носа и кормы поданы через центральные клюзы буксирные тросы достаточной длины (см. рис.1.2,а). Если буксиры будут работать с одинаковым тяговым усилием, равным 150 кН, то при равных плечах и моментах, 80 м х 150 кН = 12000 кН м, они создадут равномерное поперечное движение судна при отсутствии угловой скорости поворота.
6
Если же судно будет двигаться установившимся передним ходом, то полюс поворота переместится в носовую часть на расстояние от форштевня 40 м. Носовой буксир теперь будет работать на очень коротком плече и его момент будет равен: 40м х 150 кН = 6000 кН м. Второй буксир будет работать на большом плече с моментом, равным: 120 м х 150 кН = 18000 кН м, в результате чего корма пойдет влево (см. рисунок 1.2, б).
Эффективность работы буксиров полностью изменится, когда судно будет двигаться задним ходом. В этом случае полюс поворота переместится в корму на расстояние от ахтерштевня 40 м. Носовой буксир будет работать, имея момент разворота 120 м х 150 кН = 18000 кНм, а кормовой буксир будет работать с меньшей эффективностью, имея момент разворота 40 м х 150 кН = 6000 кНм. Теперь нос судна будет разворачиваться влево.
Эту простую методику можно использовать для оценки эффективности перекладки руля, работы гребного винта и подруливающего устройства, а также при размещении буксиров, воздействии ветра и при других обстоятельствах. Например, известен случай, когда судно после ремонта вышло в рейс из порта США в порты Австралии. Находясь в Тихом океане, оно попало в шторм и потеряло перо руля. Капитан судна принял решение следовать по назначению задним ходом, используя для управления судном носовое подруливающее устройство. Поскольку полюс поворота переместился в кормовую часть, а плечо от него до носового подруливающего устройства было достаточно большим, то судно эффективно удерживалось в заданном направлении движения и смогло самостоятельно подойти к побережью Австралии, где ему оказали дальнейшую помощь местные буксиры.
Лоцманы в порту Ильичевск успешно осуществляют подход к причалу судна с носовым подруливающим устройством кормой. Для этого они подводят судно на линию причала, дают задний ход и с помощью подруливающего устройства направляют его кормой к причалу. Затем гасят инерцию и подают кормовой швартов, работают подруливающим устройством и поджимают нос к причалу.
Однако необходимо учитывать, что при движении судна передним ходом, когда полюс поворота находится в носовой части и плечо между ним и подруливающим устройством практически отсутствует, работа подруливающего устройства будет не эффективной. Сила упора подруливающего устройства не будет создавать момента вращения, а струя воды от него будет протекать вдоль борта судна.
7
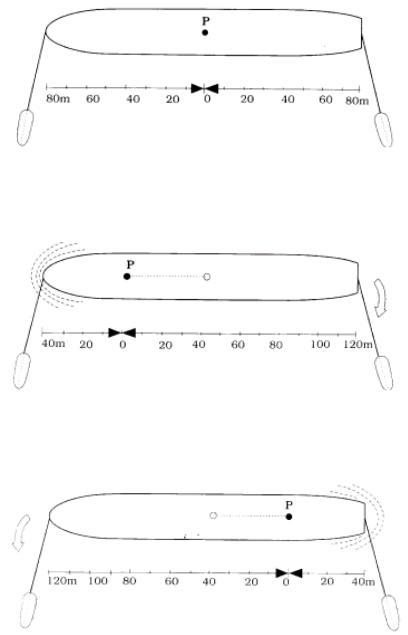
а) Судно остановлено.
б) Движение вперед
в) Движение назад
Рисунок 1.2 – Плечи и моменты разворота в зависимости от направления движения судна
1.2. Воздействие течения на маневренные характеристики судна
Следует помнить о том, что движущаяся масса воды в сотни раз плотнее воздуха и, следовательно, она может генерировать силы огромной величины. Поэтому упрощенный подход для определения этих сил является неразумным и даже опасным. Если судно следует вдали от отмели или искусственного сооружения, препятствующих течению, и не предпринимаются меры для предот-
8
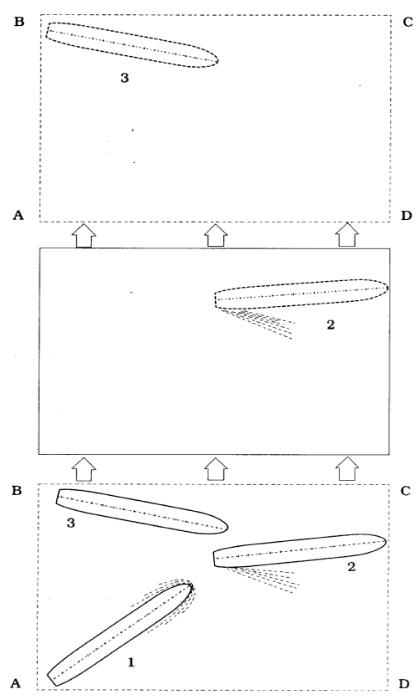
вращения сноса с помощью буксиров, якорей и т.п., то оно может маневрировать точно так же, как при отсутствии течения (см. рис. 1.3).
Рисунок 1.3 – Воздействие течения при маневрировании судна 1) встречное течение; 2) попутное течение; 3) течение отсутствует
Важно отметить тот факт, что акватория ABCD, которая окружает маневрирующее судно в конкретный момент времени, перемещается вместе с ним на протяжении всего маневра. Несмотря на то, что в течение этого периода маневренные характеристики судна не ухудшились, однако оно будет снесено относительно неподвижного объекта от запланированного движения. Этот снос может быть достаточно большим. Например, при скорости попутного течения 2
9
узла судно пройдет за 15 минут расстояние относительно грунта на ½ мили больше.
Поэтому необходимо, чтобы судоводитель заранее оценил скорость и направление течения и учитывал его при маневрировании. Несмотря на сложность плавания и маневрирования при наличии течения, например, в том случае, когда оно направлено поперек причала, его все же можно использовать для улучшения управляемости судна на малом ходу и для придания судну прижимного движения.
При встречном течении. Используя малые обороты гребного винта или продвигаясь вперед толчками, чтобы уменьшить длину тормозного пути относительно воды при встречном течении, можно сбалансировать скорость судна со скоростью встречного течения, удерживая полюс поворота в носовой части, даже при минимальной скорости судна относительно грунта. Этим можно сохранить хорошую управляемость судна.
Продвигаясь на встречном течении, рекомендуется наблюдать на траверзе за перемещением неподвижного предмета, чтобы наилучшим образом сохранять баланс скорости течения и скорости судна. Если судно начнет перемещаться назад по течению, то это может означать, что оно остановилось относительно воды, а полюс поворота переместился на мидель-шпангоут. В этом случае судно перестанет управляться до тех пор, пока не будет движения относительно воды.
При попутном течении. При попутном течении создается наиболее неблагоприятная ситуация, когда очень трудно сохранить управляемость судна на малом ходу. Например, судно перемещается на попутном течении, скорость которого равна 1,5 узла. Для того чтобы удерживать судно на курсе относительно воды, необходимо, чтобы полюс поворота находился в носовой части. В этом случае скорость судна относительно грунта должна быть значительно больше скорости течения. Чтобы уменьшить эту скорость относительно грунта, необходимо дать двигателю задний ход и двигаться против течения. Однако когда судно начнет движение против течения, полюс поворота переместится в его кормовую часть и судно потеряет управляемость.
На попутном течении очень трудно управлять судном. Если это практически возможно, то предпочтительнее следовать против течения.
При диагональном течении. Если удалось сбалансировать скорости судна и течения относительно воды и скорость судна относительно грунта стала минимальной, то тогда можно использовать диагональное течение для создания прижимного движения судна. Часто этого можно достичь, используя только перекладку руля. Однако, если перекладки руля будет недостаточно, то можно использовать кратковременные толчки двигателем, чтобы привести течение на нужную сторону.
Результирующий вектор скоростей течения и движения судна позволит судну приобрести дрейф в нужную сторону. Чтобы остановить или скорректи-
10