

2.7. Оценка навигационной безопасности
Обеспечение навигационной безопасности - необходимое условие эффективной работы флота, охраны человеческой жизни на море и защиты окружающей среды от загрязнения.
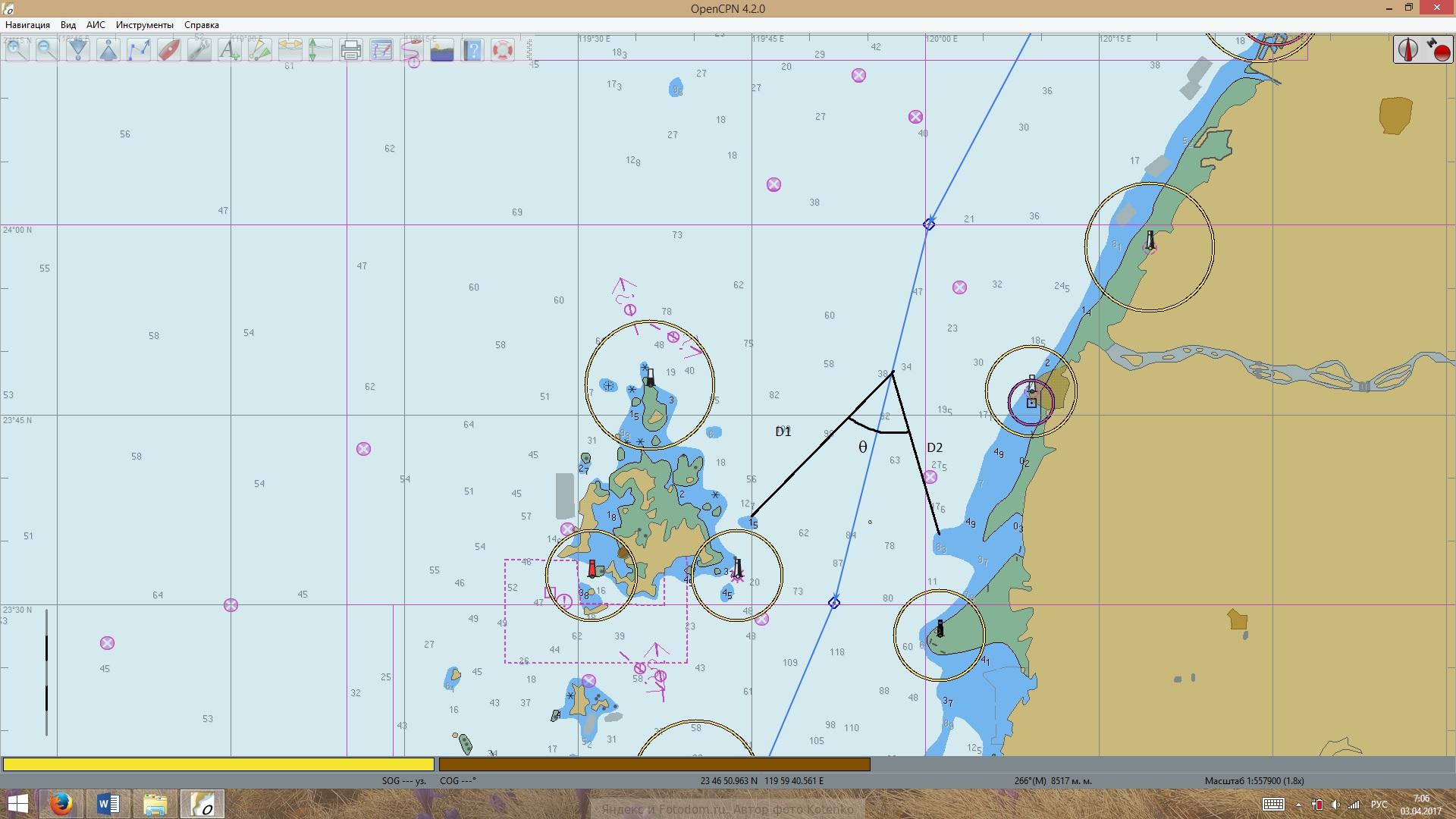
Навигационная безопасность оценивается вероятностью Р отсутствия навигационных аварий в течение определенного времени. К навигационным авариям относятся все случаи касания судном грунта, вследствие ошибок выбора пути и проводки по нему судна. Вероятность P такого события зависит от расстояния до опасности D и среднеквадратической погрешности mD, с которой известно это расстояние. При расчетах расстояния до опасности следует считать расстояние до изобаты, определенной судоводителем как предельно безопасной. Пересечение судном этой изобаты угрожает столкновением судна с подводным препятствием.
Погрешность mD зависит от погрешности места судна dмс и погрешности положения опасности dпо:
 (2.4)
(2.4)
Значение dмс равно проекции эллипса погрешностей места судна, в момент кратчайшего сближения с опасностью, на нормаль к линии пути судна. Такую проекцию называют радиус-вектором подеры эллипса погрешностей вдоль названной нормали. Радиус-вектор подеры эллипса может будет рассчитан следующим путем используя формулу:
![]()
где a и b – большая и малая полуоси эллипса погрешностей; ψ - угол между полуосью и линией пути судна.
Значения a, b и ψ определяют, используя Приложение 5 в МТ – 75:
mлп1 = 0,0134; mлп2= 0,011, λ = 1,218.
Из приложения 5 МТ-75 мы видим, что для угла пересечения изолиний в 062 градуса и из отношения среднеквадратических ошибок линий положений:
A = 1,38; B = 0,92; Ψ = 22;
Из этого следует, что dмc равняется 1,198 кбт
Значение dпо характеризует погрешность, с которой известно положение опасности (опасной изобаты). Погрешность положения опасной изобаты обусловлена погрешностью планового положения изобат (глубин) по нормали к линии пути судна. Эта погрешность отражает точность гидрографических и картографических работ, а также деформацию морских карт под влиянием температуры и влажности, и оценивается для тиражного оттиска карт среднеквадратической величиной 1 мм в масштабе карты. Следовательно
![]()
где С – знаменатель масштаба навигационной карты.
dпо = 554000/(1000*185,2)=0,2991 кбт (при масштабе карты 1:554000)
Далее находят нормированное (по величине mD) расстояние до опасности по нормали к линии пути и находят их соотношение
![]()
Как уже описывалось выше: ‘’погрешность mD зависит от погрешности места судна dмс и погрешности положения опасности dпо’’, и из этого следует:
mD2 = 1,1982 + 0,2992 = 1,5246
Благодаря уже найденной величине mD кратчайшему расстоянию до опасности можно найти нормированное расстояние до опасности.
В расчетах рекомендуется использовать функцию распределения по Лапласу, которая представлена в форме таблицы 11.
Таблица 11 – Распределение вероятностей по Лапласу.
|
y |
0,56 |
0,69 |
0,76 |
0,89 |
0,96 |
|
Ф(y) |
0,2089 |
0,2518 |
0,2735 |
0,3107 |
0,329 |
По полученному значению и выборки из таблицы 11 получим искомую вероятность Р = Ф(у), характеризующую надежность навигации.
Заключение
В данном переходе из порта Тяньцзинь (Китай) в порт Карачи (Пакистан) плавание происходило по локсодромии, поскольку разница между ортодромией и локсодромией несущественна ею можно пренебречь. Выбор пути был произведен на основании рекомендаций пособий «Океанские пути мира» с учетом сведений лоций.
Основной системой определения места судна в течение рейса является спутниковая система GPS; резервными выбраны ОМС по береговым ориентирам и астрономические методы обсервации. В работе произведено гидрометеорологическое описание перехода с представлением основных характеристик в табличном виде. Сделан расчет естественной освещенности на протяжении перехода. Построены графики приливов рядом с портами отхода и прихода на даты начала и окончания рейса. Длительность перехода составила 20 дней 4 часа 34 мин с началом 1 Августа и окончанием 20 Августа 2016 года. Переход является безопасным и экономным.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Рекомендации по организации штурманской службы на морских судах Украины (РШСУ-98). – Одесса: ЮжНИИМФ, 1998. – 111 с.
2. NP 131. Catalogue of Admiralty Charts and Publications.-The United Kingdom Hydrographic Office, 2011.-180р.
3. NP 283(2). Admiralty List of Radio Signals Vol. 3. Part 2, Maritime Safety Information Services: The Americas, Far East and Oceania.- The United Kingdom Hydrographic Office, 2010.
4. NP 285. Admiralty List of Radio Signals Volume 5. Global Maritime Distress and Safety System (GMDSS). - The United Kingdom Hydrographic Office, 2007.
5. Sailing Directions: NP69A, NP5, NP7A.
6. NP286. Admiralty List of Radio Signals (Parts 5, 7).
7. NP82, NP80 - Admiralty List of Lights and Fog Signals.
8. Guide to Port Entry. - Reigate: Shipping Guides Ltd., 2011.
9. Международные правила предупреждения столкновений судов в море, 1972 (МППСС-72).
10. Баранов Ю.К., Гаврюк М.И., Логиновский В.А., Пес¬ков Ю.А. Навигация. - 3-е изд., перераб. и доп. - СПб.: Лань, 1997. - 512 с.
11. Кондрашихин В.Т. Определение места судна. — 2-е изд., пере¬раб. и доп. - М.: Транспорт, 1989. - 230 с.
12. Кондрашихин В. Т., Бердинских Б. В., Мальцев А. С., Ко¬зырь Л. А. Справочник судоводителя по навигационной безопасности морепла¬вания. - Одесса: Маяк, 1990.- 168 с.
13. Мореходные таблицы – МТ-75.