

3.5. Спутниковый компас.
Общие сведения о средне орбитальных спутниковых навигационных системах. Рассматривая источники информации, необходимой при оперативном управлении движением морских судов по заданному маршруту, следует отметить, что основными из них стали средне орбитальные спутниковые навигационные системы: GPS и ГЛОНАСС. Традиционная бортовая аппаратура этих систем предоставляет данные о системном времени, координатах места, путевом угле и путевой скорости судна.
Таблица 3.2. Основные характеристики средне орбитальных СНС.
Характеристика |
|
GPS |
ГЛОНАСС |
||
Количество навигационных спутников |
24+3 (резервных) |
24+3 (резервных) |
|||
Количество плоскостей орбит |
|
|
6 |
3 |
|
Угол между |
плоскостями |
|
соседних |
60 |
120 |
орбит, град. |
|
|
|
|
|
Наклон плоскости орбит к экватору, град. |
55 |
64,8 |
|||
Радиус орбит, км. |
|
|
20145 |
19100 |
|
Период обращения спутников |
|
|
12 час |
11 час 15 мин |
|
Технологии разделения каналов |
|
Кодовая |
Частотная |
||
Несущие частоты, МГц. |
|
|
|
|
|
F1 |
|
|
|
1575,42 |
1602,56…1615,50 |
F2 |
|
|
|
1227,60 |
1246,44…1256,50 |
Навигационные сигналы: |
|
|
|
|
|
стандартной точности |
|
|
C/A-код |
C/A-код |
|
высокой точности |
|
|
P-код |
P-код |
|
Частота последовательности импульсов в |
|
|
|||
навигационных сигналах, МГц: |
|
1,023 |
0,511 |
||
С/А-код |
|
|
|
||
Р-код |
|
|
|
10,23 |
5,11 |
Режимы обслуживания |
|
|
SPS, PPS |
Единый |
|
Системное время |
|
|
UTC (USNO) |
UTC (SU) |
|
Опорная координатная система |
|
WGS84 |
SGS90 |
||
Метод определения положения объекта |
Квази дальномерный |
Квази дальномерный |
|||
Метод определения скорости объекта |
Квази радиально- |
Квази радиально- |
|||
|
|
|
|
скоростной |
скоростной |
Погрешности |
(95%) |
аппаратуры |
|
|
|
гражданских |
потребителей |
при |
|
|
|
определении: |
|
|
|
36 |
28 |
плановых координат, м. |
|
|
|||
высоты, м |
|
|
|
68 |
40 |
скорости, м/с |
|
|
0,4 |
0,3 |
|
времени, мкс |
|
|
0,68 |
1,4 |
|
59
Основные характеристики названных спутниковых систем содержатся в табл. 3.2.
Сокращения, приведенные в этой таблице, обозначают:
SPS, PPS - два уровня обслуживания потребителей в GPS: стандартные определения (SPS – Standard Positioning Service), точные определения (PPS – Precise Positioning Service). PPS основывается на точном Р-коде, а SPS – на общедоступном С/А-коде. Уровень обслуживания РPS предоставляется военным и федеральным службам США, а SPS – массовому гражданскому потребителю. В ГЛОНАСС режим обслуживания специальных служб и массовых потребителей единый, за счет этого предоставляемая гражданским потребителям точность определений выше, чем у GPS.
UTC (USNO), UTC (SU) – универсальное координированное время военноморской обсерватории США и Российской Федерации (UTC – Coordinated Universal Time, USNO – US Naval Observatory, SU – Soviet Union или RF – Russian Federation).
WGS84, SGS90 (ПЗ-90) – всемирные горизонтальные геодезические датумы
(WGS84 - Word Geodetic System of 1984; SGS90 – Soviet Geocentric Coordinate System of 1990).
СНС «ГЛОНАСС» пока работает с неполным составом спутников. Несмотря на это, приемники СНС, способные использовать навигационные сигналы обеих систем GPS и ГЛОНАСС, позволяют получить точность определений места ±15÷20 м.
Развитию спутниковых навигационных систем уделяется первостепенное внимание. Это объясняется, прежде всего, их универсальностью. СНС дают возможность получить информацию практически о всех кинематических параметрах движения судна: о положении, путевом угле и путевой скорости, о курсе судна, о параметрах килевой и бортовой качки. Кроме обеспечения чисто навигационных задач по управлению отдельными объектами, они позволяют решать задачи радиосвязи и управления потоками судов, осуществлять привязку систем единого времени, использоваться для синхронизации работы различных систем.
Дифференциальный режим работы СНС в районе контрольной станции обеспечивает точность определения положения ±1÷5 м. Использование в специальных дифференциальных подсистемах для геодезических целей фазовых измерений несущей частоты дает возможность при относительном нахождении места получить точность порядка нескольких сантиметров.
Ближайшая (2003÷2005 гг.) перспектива развития средне орбитальных СНС связана с их интеграцией. Под интеграцией спутниковых навигационных систем понимается использование их общего радионавигационного поля при независимом управлении этими СНС. По этому направлению создается глобальная навигационная спутниковая система ГНСС (GNSS). Она строится
60
путем интеграции систем GPS, ГЛОНАСС с дополнением их подсистемами стационарных спутников:
EGNOS (the European Geostationary Navigation Overlay Service) в
европейском регионе;
WAAS (the American Wide Area Augmentation System) в американском регионе;
MSAS (the Japanese Multi-functional Satellite Augmentation System) в
Японии.
EGNOS, WAAS, MSAS представляют собой широко зонные дифференциальные подсистемы, в которых передача поправок производится через стационарные спутники Инмарсат-3. В регионах, обслуживаемых этими подсистемами, точность определения положения будет находиться в пределах ±10 м.
Принцип определения курса в спутниковом компасе. С
помощью средне орбитальных навигационных спутниковых систем можно получать информацию не только о координатах и составляющих путевой скорости судна, но также и о его курсе. С этой целью используются двух или трех антенные системы. В принципе для получения курса необходимо только две антенны. Третья антенна позволяет вместе с курсом судна определить углы килевой, бортовой качки и улучшить точность измерения курса, уменьшив негативное влияние на нее качки и рыскания.
Вид трех антенной системы представлен на рис. 3.5. Диаметр окружности, проходящей через антенны А1, А2, А3, приблизительно равен одному метру.
А1
А2 А3
Рис. 3.5. Трех антенная система спутникового компаса.
Допустим, две антенны А1 , А2 спутниковой системы GPS расположены в диаметральной плоскости судна (рис.3.6). Расстояние между антеннами b составляет порядка 85 см.
Передача сигналов навигационными искусственными спутниками Земли (НИСЗ) в системе GPS производится на двух частотах:
61

F1=1575,42 и F2=1227,60 MГц. Режим излучения - непрерывный с псевдошумовой модуляцией. Навигационные сигналы представляют собой защищенный Р–код (precision code), которым модулируются частоты F1, F2, и общедоступный С/А–код (coarse and acquisition code),
которым модулируется только частота F1.
В бортовой аппаратуре GPS для судов коммерческого флота используется только общедоступный С/А–код на частоте F1. Длина волны этой несущей частоты составляет приблизительно 19 см.
При определениях положения, по координатам места судна и по эфемеридам спутников всегда могут быть рассчитаны горизонтные координаты НИСЗ: высота hS и азимут AS . На рис. 3.6 эти координаты показаны для одного из спутников.
Направление на спутник
|
hS |
hS |
|
N |
|
С |
|
|
|
AS |
|
|
|
qS |
D F |
|
K |
qS |
b |
A1 |
ДП |
|
|
A2 |
|
Плоскость |
|
|
горизонта |
Рис. 3.6. К характеристике принципа работы спутникового компаса.
Расстояния, которые проходит сигнал с определенного спутника до антенн А1, А2, отличаются на величину D. Эту разность расстояний можно найти, измерив сдвиг фаз Ф несущего сигнала, принимаемого
антеннами А1, А2:
Ф = ψ + n ,
62
где n – целое число циклов, |
ψ - дробная часть цикла. |
||
Фазовым измерениям |
присуща многозначность, поэтому |
||
измеряется только |
ψ , |
а |
n должно быть определено по |
дополнительным данным.
По значению Ф величина D находится по формуле:
D = λ Ф ,
где λ – длина волны несущего сигнала.
Зная D и высоту hS спутника над истинным горизонтом, можно найти курсовой угол qS спутника и истинный курс судна К:
A F = |
D cos h |
S |
; |
q |
S |
= arccos |
A2 F |
; |
K = A |
− q |
S |
. |
|
||||||||||||
2 |
|
|
|
|
b |
S |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Значение курса определяется по всем спутникам, находящимся над горизонтом, и усредняется.
Для вычисления координат объекта по навигационным сигналам спутников GPS в трехмерном пространстве необходимо измерить дистанции не менее чем до 4–х, а при двухмерной навигации – не менее чем до 3–х спутников. Для получения добавочно к координатам истинного курса объекта, число спутников, до которых измеряются расстояния, должно быть на один больше, так как количество определяемых параметров увеличивается на единицу. Кроме координат и постоянной погрешности расстояния здесь требуется также найти значение целого числа циклов n.
Для случаев, когда сигналы спутников GPS могут быть блокированы высокими зданиями, или мостами, под которыми проходит судно, спутниковый компас снабжается свободным гироскопом. По параметрам углового положения его оси обеспечивается выработка значений курса в те короткие промежутки времени, когда не поступают сигналы от спутников. Кроме того, названный гироскоп применяется для уменьшения влияния качки и рыскания на точность показаний курса.
Состав аппаратуры спутникового компаса и его характеристики. В состав спутникового компаса входит:
•три антенны, помещенные на жесткой с высокой точностью установленной платформе;
•основной модуль;
•устройство управления и отображения.
Восновном модуле располагаются приемник GPS, свободный гироскоп, процессор.
Спутниковый компас предоставляет информацию о координатах судна, курсе, путевом угле, путевой скорости, углах бортовой и килевой качки.
63
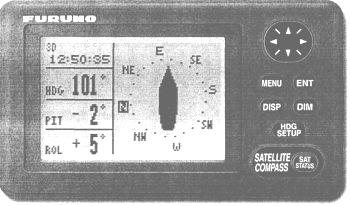
Устройство управления и отображения спутникового компаса фирмы “Furuno” показано на рис. 3.7. Этот спутниковый компас может отображать данные в трех формах, предназначенных для:
–управления судном рулевым (курс, подвижная картушка с неподвижным индексом курса, путевая скорость, путевой угол, углы килевой и бортовой качки),
–навигационных целей (дата, время, координаты места судна, путевая скорость и путевой угол);
–указания направления диаметральной плоскости судна (дата, время, курс, путевая скорость и путевой угол).
Рис. 3.7. Устройство отображения спутникового компаса фирмы
“Furuno ”.
Спутниковый компас может передавать информацию о курсе судна в такие устройства, как РЛС, САРП, авторулевой, транспондер АИС, ECDIS и в другую аппаратуру. Он имеет такие характеристики:
•Средняя квадратическая погрешность (СКП) показаний курса – ±0,50;
•СКП показаний угла бортовой (килевой) качки – ±0,50;
•Точное слежение за курсом при скорости поворота – до 25 0/с;
•Время прихода в готовность после включения – 4 мин;
•95% погрешность определения места судна по GPS – ±10 м;
•95% погрешность определения места судна по DGPS – ±5 м;
•Интерфейс – МЭК 61162.
На работу спутникового компаса не влияют скорость судна, ускорения, изменение широты, геомагнетизм.
Основной его недостаток по сравнению с ГК – неавтономность.
64