

1. Системы отсчёта и координат. Осн. Хар-ки мех. Движения. Прямол-е и кривол-е дв-е. V b w.
Положение движущегося тела в пространстве можно определить лишь относительно некоторого определенного другого тела, наз. телом отсчета, которое условно считается неподвижным. Определить положение точки или тела «по отношению к пустому пространству» невозможно и физически бессмысленно. Связывая с телом отсчета произвольную систему координат, мы получим систему отсчета положений материальной точки. Система отсчета должна быть хронометрирована, т.е. снабжена «часами», с помощью которых однозначно определяются моменты времени.
Простейшей системой отсчета явл. прямоугольная система координат OXYZ (декартова), рис. 1. Положение точки М в этой системе координат характеризуется тремя координатами: X,Y,Z
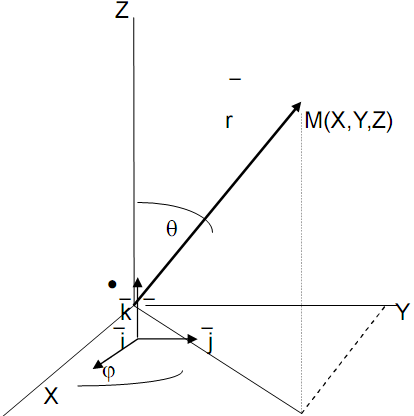 Рис.1.
Прямоугольная система координат.
Рис.1.
Прямоугольная система координат.
Сферическая система коордтнат: М(r,,).
Другие системы координат: цилиндрическая, полярная.
Во
всех случаях при различном выборе
системы отсчета радиус вектор r
(векторный метод описания) и положение
точки в пространстве (координатный
метод) характеризуются количественно
тремя числами, которые могут изменяться
независимо друг от друга. Это
является математическим отражением
того факта, чтопространство
трехмерно.
Если тело не испытывает воздействия со стороны других тел, то оно называется свободно движущимся телом.
Если в качестве системы отсчета выбрать систему, связанную с каким–либо свободно движущимся телом, то в такой системе свободное движение других тел происходит прямолинейно и равномерно (с постоянной по величине и направлению скоростью). Это утверждение составляет содержание закона инерции, впервые открытого Галилеем. Система отсчета, связанная со свободно движущимся телом, наз. инерциальной системой отсчета. Закон инерции наз. также первым законом Ньютона.
Если некоторая система движется по отношению к инерциальной системе с постоянной (по величине и направлению) скоростью, то она также будет инерциальной.
Все физические явления протекают одинаково в различных инерциальных системах отсчета, которые являются, таким образом, физически неотличимыми друг от друга или эквивалентными. Поэтому все физические явления изучаются в инерциальных системах отсчета. Этот закон называется принципом относительности.
Поскольку три величины, характеризующие положение точки в пространстве, взаимно независимы, говорят, что мат. точка обладает тремя степенями свободы
Если материальная точка движется, то ее координаты с течением времени изменяются, т.е. величины X,Y,Z и радиус вектор r являются функциями времени:
r=r(t)
X =X(t) (1)
Y=Y(t)
Z=Z(t)
Функции времени, определяющие координаты движущейся точки в любой заданный момент времени, называются кинематическим
законом движения.
Совокупность последовательных положений, занимаемых точкой М в процессе ее движения, образует в пространстве линию, называемую траекторией движущейся точки.
Кинематический закон движения определяет и траекторию движущейся точки.
Если из первого уравнения системы (1) выразить t =f1(x) и подставить в остальные два уравнения, то получим:
Y = f2f1(x) = F(x);
Z = f3f1(x) =Ф(х) (2)
Траектория движущейся материальной точки аналитически задается уравнениями вида (2).
Если траектория является прямой линией, то движение называется прямолинейным. Движение, характеризующееся криволинейной траекторией, называется криволинейным. Расстояние, отсчитанное вдоль траетории движущегося тела, которое проходится им за некоторый отрезок времени, называется длиной пути (или путем). Движение, при котором тело за произвольные равные промежутки времени проходит равные пути, называется равномерным. Если же за какие-либо два равных отрезка времени телом проходятся различные пути, движение будет неравномерным.
Совершая движение, различные тела за одинаковые отрезки времени проходят неодинаковые пути. Чем больше путь, проходимый телом за некоторый определенный промежуток времени, тем быстрее это тело движется. Для количественной оценки быстроты механического движения вводится понятие скорости. Чем быстрее тело движется, тем больше его скорость.
В случае равномерного прямолинейного движения скорость равна отношению проходимого телом пути к отрезку времени, за который он проходится, т. е. равна пути, проходимому телом за единицу времени.
Если t1 S1, t2 S2, то за t = t2 – t1 тело проходит путь S=S2-S1
Следовательно, скорость
V = (S2 – S1)/ (t2 – t1) = S/ t, т.е. S t, a V = const. (по величине!).
В случае неравномерного движения с изменением t отношение r/t будет изменяться, т.е. r/t = f(t). Это значит, что средняя скорость окажется неодинаковой при различной величине отрезков t, примыкающих к интересующему нас моменту времени t, поэтому с ее помощью невозможно характеризовать движение в данный момент времени однозначно.
Переходя к пределу для бесконечно малого промежутка времени (t0), мы получим вектор истинной, или мгновенной скорости в точке М1.
V = limV = lim r/t = dr/dt.
t t
При прямолинейном движении быстрота изменения величины скорости V характеризуется ускорением W, т.е. изменением величины скорости за единицу времени.
В общем случае произвольного криволинейного движения вектор скорости V может изменяться и по величине и по направлению. Быстрота изменения вектора скорости тогда будет характеризоваться некоторым вектором ускорения W.
Равномерное прямолинейное движение – единственный вид движения без ускорения!!
Если W const и W || V, то в таком случае скорость за любые равные отрезки времени будет изменяться на одинаковую величину и такое движение называется равномерно ускоренным прямолинейным.
S = S0 + V0t + Wt2/2; V = V0 + Wt.
Даже если величина скорости все время остается неизменной по величине, но движение криволинейно, т.е. скорость изменяет свое направление, то ускорение W 0, т.к. V оказывается отличным от нуля при любом конечном значении t.