

АТ / Новая папка / АТ / 13
.pdf126
Лекция 13
АНАЛИЗ ИМПУЛЬСНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
План
1.Введение
2.Непрерывные модели импульсных преобразователей
3.Уравнения состояния электрических цепей
4.Метод усредненного пространства состояний
5.Выводы
1. Введение
Импульсные преобразователи, которые мы рассматривали в течение трех предыдущих лекций, имеют значительные преимущества перед традиционными непрерывными источниками вторичного электропитания. Эти преимущества заключаются в более высоком КПД, меньших габаритах и массе.
Однако анализ и проектирование импульсных источников являются весьма трудоемкими. Причина в том, что в импульсных источниках происходят периодические коммутации. Традиционные методы анализа непрерывных цепей для таких систем неприменимы (точнее, их применение сопряжено с серьезными трудностями). Для расчета таких схем требуются специализированные методы.
2. Непрерывные модели импульсных преобразователей
Для получения непрерывной модели преобразователя используют
средние значения переменных за период: |
|
||||||||
|
|
x(t) = |
1 |
t òtTx(τ )dτ . |
(13.1) |
||||
T |
|||||||||
|
|
|
|
|
|
|
− |
|
|
Выражение (13.1) называют оператором усреднения. |
|
||||||||
Рассмотрим основные свойства этого оператора. |
|
||||||||
1. Линейность: ax (t ) +by (t ) = ax(t ) +by(t) . |
|
||||||||
Здесь a и b – постоянные, не зависящие от времени. |
|
||||||||
2. Дифференцируемость |
|
|
|
= |
dx(t ) |
. |
|
||
dx(t ) |
|
||||||||
|
dt |
|
|
|
|||||
|
|
|
|
|
dt |
|
|||
3. Инвариантность к сдвигу
127
x(t −τ ) = x(t −τ ) .
Перечисленные свойства могут быть легко доказаны с помощью формулы (13.1).
В общем случае среднее значение произведения двух функций времени не равно произведению их средних значений:
x(t ) y(t) ¹ x(t ) y(t ) .
Однако если x(t ) и y(t ) имеют малый уровень пульсаций и изменяются относительно медленно, то можно пользоваться приближенным равенством:
|
» x(t ) y(t) |
(13.2) |
x(t ) y(t ) |
Поскольку средние значения токов и напряжений удовлетворяют условиям линейности и инвариантности во времени, для них справедливы законы Кирхгофа:
åik = 0;
k
åuk = 0 .
k
Компонентные уравнения линейных элементов для средних значений аналогичны уравнениям для мгновенных значений.
Для резистора u (t ) = Ri (t ) .
Для индуктивного элемента u (t) = L didt(t) .
Компонентное уравнение емкостного элемента i (t ) =C dudt(t) .
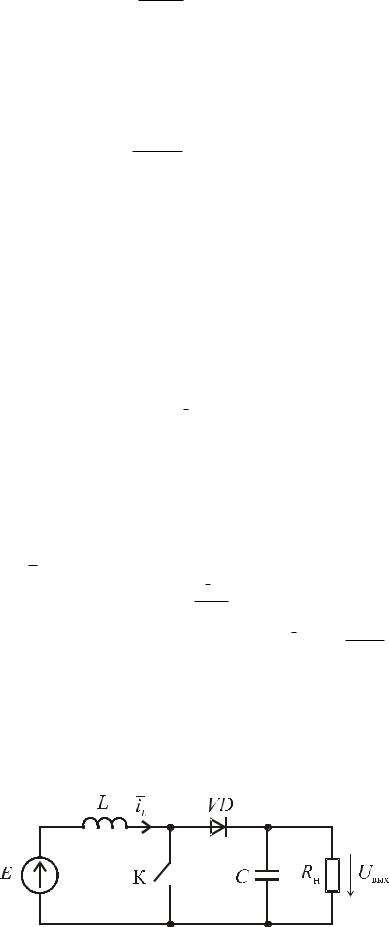
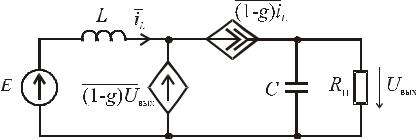
Нелинейным элементам, а также элементам, изменяющимся во времени соответствуют схемы замещения на основе управляемых источников. В качестве иллюстрации на рис. 13.1 показан повышающий импульсный регулятор, а на рис. 13.2 – схема замещения для средних значений.
128 Рис. 13.1
Рис. 13.2
В схеме на рис. 13.2 g(t ) – функция переключения.
ì |
1 |
0 < t < tи |
g(t) = í |
|
tи < t < T |
î0 |
||
Рассмотренный метод, заключающийся в замене каждого элемента моделью для средних значений, называют методом прямого усреднения (in-place averaging).
Достоинство метода заключается в том, что непрерывную модель можно анализировать с помощью программ схемотехнического моделирования, таких как Pspice или Multisim.
3. Уравнения состояния электрических цепей
В последние годы для расчета систем с периодической коммутацией предложено несколько методов. Одним из них является метод усредненных переменных состояния. Он широко используется для исследования характеристик импульсных преобразователей.
Рассмотрим сначала основные положения метода переменных состояния применительно к цепям с непрерывными токами и напряжениями.
Поведение электрической цепи описывается в общем случае системой дифференциальных уравнений. С помощью подстановок и замены переменных эту систему уравнений можно преобразовать к одному дифференциальному уравнению n-го порядка. Как правило, порядок уравнения равен суммарному числу индуктивных и емкостных элементов: n= nL + nC . Однако более рационально записывать систему дифференциальных уравнений в нормальной форме (форме Коши).
Уравнения в форме Коши состоят из уравнений первого порядка, разрешенных относительно первой производной одной из переменных. В левой части каждого уравнения записывают производную, а в правой –

129
функции переменных цепи и напряжений и токов независимых источников.
В матричной форме уравнения состояния имеют вид:
[X(t)] =[A][X(t)] + [B][U (t)] .
Здесь |
[X ] – вектор переменных состояния, |
[X ] |
– вектор производных, |
|
|
|
|
[U (t )] |
– вектор входных воздействий. |
|
|
Квадратную матрицу [A] называют матрицей параметров схемы, а
[B]– матрицей параметров входного воздействия.
Вкачестве примера запишем уравнения состояния последовательной RLC-цепи (рис. 13.3):
didtL = − RL iL (t) − L1uC (t) + L1e(t), dudtC = C1 iL (t) .
Рис. 13.3
Матрица параметров схемы
|
|
[ A] = êé− R/ L −1/ Lúù . |
|
||||
|
|
|
ë |
1/C |
0 |
û |
|
Матрица параметров входного воздействия |
|
||||||
|
|
|
|
é1/ Lù |
|
|
|
|
|
|
[B] = ê |
ú . |
|
|
|
|
|
|
|
ë |
0 û |
|
|
Зная |
состояние |
цепи [X (t )] |
и |
вектор входных |
воздействий [U (t )] , |
||
реакцию |
цепи [Y (t)] |
(токи и |
напряжения |
ветвей) |
можно найти как |
||
линейную комбинацию вектора переменных состояния и вектора входных воздействий:
[Y (t)] = [C][ X (t)] + [D][U (t )].
130
Матрицы [C] и [D] зависят от конфигурации и параметров цепи. Например, если компонентами вектора [Y (t )] являются напряжения uL и uR, они находятся с помощью уравнений
uL (t) = −RiL (t) − uC (t) + e(t) ;
uR (t ) = RiL (t) .
В матричной форме
éuL |
(t)ù |
é- R - 1ùé iL |
(t) ù |
é1ù |
||
êu |
(t)ú |
= ê |
R 0 |
úêu |
(t)ú |
+ ê0úe(t) . |
ë R |
û |
ë |
|
ûë C |
û |
ë û |
Существует несколько причин, по которым дифференциальные уравнения электрической цепи целесообразно представлять в форме уравнений состояния. Во-первых, уравнения состояния можно записать как для линейных, так и для нелинейных цепей. Во-вторых, не всегда можно получить аналитическое решение нелинейного дифференциального уравнения, а численные методы решения ориентированы на уравнения, записанные в нормальной форме. Наконец, в-третьих, матричная форма уравнений состояния не зависит от порядка цепи.
4. Метод усредненного пространства состояний
Метод усредненного пространства состояний основан на том факте, что любой широтно-импульсный преобразователь представляет систему с двумя или более состояниями. В каждом из двух положений ключа система линейна, и уравнения состояния могут быть записаны обычным путем. Переменными состояния являются токи индуктивных и напряжения емкостных элементов. В матричной форме записи уравнения состояния импульсной системы имеют вид
[X ] =[A]1 [X ] + [B]1 [U ]
[X ] =[A]2 [X ] + [B]2 [U ]
Здесь [A]1 , [A]2 , [B]1 , [B]2 – системные матрицы для каждого из двух состояний ключей.
Основной момент в методе усредненных переменных состояния состоит в замещении двух уравнений состояния одним эквивалентным уравнением
[X ] =[A][X ] +[B][U ],

131
в котором матрицы [A] и [B] получены путем взвешенного усреднения матриц, описывающих импульсную систему с двумя состояниями. При относительной длительности одного из интервалов d система в течение части d периода работы ключа описывается матрицами [A]1 и [B]1 , а в течение остающейся части (1 − d ) – матрицами [A]2 и [B]2 . Эквивалентные матрицы системы определяются как
[ A] ≡ d[ A]1 + (1 − d )[ A]2
[B] ≡ d[B]1 + (1 − d )[B]2 .
Матрицам [A] и [B] соответствует одна эквивалентная цепь, Рассмотрим решение для эквивалентной цепи, описываемой
матрицами [A] и [B] . Для установившегося режима решение получим, положив [X ] =0 :
[ X ] = −[ A]−1 [B][U ] .
Метод усредненных переменных состояния дает решение, обеспечивающее компромисс между точностью и простотой. Метод применяют для анализа преобразователей с ШИМ в тех случаях, когда частота среза сглаживающего фильтра значительно ниже, чем частота коммутации.
Метод усредненных переменных состояния дает достаточно точные результаты, если выполняются следующие условия.
1.Амплитуда пульсаций невелика;
2.Переменные составляющие напряжений и токов изменяются по линейному закону, а их средние значения равны нулю.
В качестве иллюстрации составим уравнения состояния для повышающего импульсного регулятора, рассмотренного ранее (Лекция 10). Для удобства приведем схему регулятора еще раз (рис. 13.4).
Рис. 13.4
Вектор переменных состояния

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
132 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[x] = [iL |
|
uC ]t . |
|
|
|
|
|
|||||||||||||||||||||||||||
Уравнения состояния |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
diL |
= − |
uC |
(1 − g(t)) + E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
dt |
L |
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
duC |
= − |
1 |
uC + |
1 |
iL (1 − g(t)) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
RC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
dt |
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для средних значений переменных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E ≈ |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
diL |
= − |
(1− g(t)) + |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
d |
u |
C |
= − |
|
|
1 |
|
u |
C + |
1 |
|
|
|
|
|
|
|
|
|
. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
iL (1 − g(t)) |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
C |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
éduC ù |
é |
|
|
|
1 |
|
|
|
|
|
|
1 |
ù |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
ê |
dt |
ú |
|
ê- RC C |
ú |
éuC ù |
|
é |
ù |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
+ |
êC |
ú uвх . |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ê |
di |
ú |
= ê |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
ú |
ê |
|
i |
|
|
|
ú |
|||||||||||||||||
|
|
|
|
|
|
|
ê |
L |
ú |
ê |
- |
|
|
|
|
|
|
|
0 |
úë |
|
|
|
|
û |
|
ê |
0 |
ú |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
ë |
û |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
dt |
|
L |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
ë |
û |
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Интервал tи ÷Т : ключ разомкнут, диод открыт. На этом интервале |
|||||||||||||||||||||||||||||||||||||||||||||||||||
уравнения состояния имеют вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
éduC |
ù |
|
|
é |
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
ù |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
dt |
ú |
|
|
ê- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ú |
éuC |
ù |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
C |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
di |
ú |
= ê |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
ú |
ê |
|
ú . |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ê |
|
|
L |
ú |
|
|
ê |
|
- |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
ú |
ë iL |
û |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
dt |
û |
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
||||||||||
Эквивалентные матрицы системы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
é |
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
ù |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ A] = êê- |
|
|
|
|
|
|
|
|
úú ; |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
|
|
|
C |
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
- |
1 |
|
|
|
|
|
|
|
0 |
ú |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
é |
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
ù |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[B] = êê- |
|
|
|
|
|
úú . |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RC |
|
C |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ê |
- |
1 |
|
|
|
|
|
|
|
0 |
ú |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
||||||
133
В настоящее время получил распространение вариант метода, называемый прямым усреднением (direct circuit averaging). Анализируемая цепь представляется схемой замещения, в которой каждый элемент заменен усредненной моделью. Компонентные уравнения индуктивного, емкостного и резистивного элементов выполняются как для мгновенных, так и для средних значений переменных. Поэтому модели этих элементов описываются такими же уравнениями, как и сами элементы.
5.Выводы
1.Анализ и проектирование импульсных источников являются весьма трудоемкими. Причина в том, что традиционные методы анализа непрерывных цепей для таких систем неприменимы.
2.Основными аналитическими методами расчета импульсных преобразователей являются метод усреднения и метод переменных состояния.