

Лабораторные работы ПАУТКИНА / Лабораторная работа 62 ПАУТКИНА
.docxФедеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Московский государственный университет путей сообщения» (МИИТ)
Кафедра «Физика»
|
Группа: УЗС-111 |
К работе допущен |
|
|
|
|
Студент: Крюков Н.С., Подуфалов М.М. |
Работа выполнена |
|
|
|
|
Преподаватель: Пауткина А.В.
|
Отчёт принят |
|
|
|
ОТЧЁТ ПО ЛАБОРАТОРНОЙ РАБОТЕ № 62
ПРОВЕРКА ТЕОРЕМЫ ГЮЙГЕНСА-ШТЕЙНЕРА МЕТОДОМ ВРАЩАТЕЛЬНЫХ КОЛЕБАНИЙ
1.Цель работы: Определение моментов инерции твердых тел относительно оси, не совпадающей с центром масс; проверка теоремы Гюйгенса Штейнера.
 2.
Принципиальная схема установки (или её
главных узлов) или фотография:
2.
Принципиальная схема установки (или её
главных узлов) или фотография:
Рис. 4 Лабораторная
установка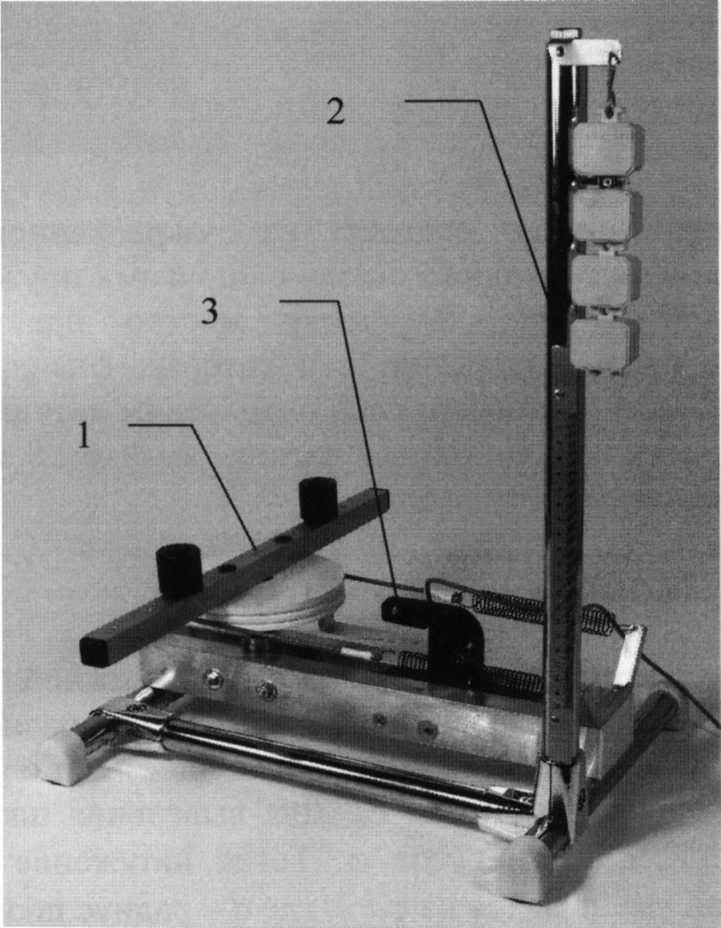
В работе определяется момент инерции колебательной системы, геометрические параметры которой можно менять.
Внешний вид лабораторной установки представлен на рис. 4. Основными элементами установки являются колебательная система 1, оптический датчик 2 и стойка для измерения жёсткости пружин 3. Датчик подключён к компьютеру; результаты выполняемых измере ний выводятся на экран его монитора (на рисунке не изображён).
Колебательная система (рис. 5) в свою очередь состоит из закрепленного на вертикальной оси диска (шкива) 1, ремень 2 которого связан с упругими одинаковыми пружинами 3, зацепленными за штыри стойки. К шкиву жестко прикреплена металлическая планка 4 с рядом отверстий 5, в которых фиксируются съёмные грузы 6. Система приводится во вращательно-колебательное движение; колебания регистрируются оптическим датчиком 7 в форме импульсов, которые возникают при перекрытии оптической оси датчика непрозрачной пластиной 8, жестко скрепленной
со шкивом колебательной системы.
3. Основные теоретические положения к данной работе (основополагающие утверждения: формулы, схематические рисунки):
4. Таблицы и графики.
Коэффициент жесткости пружины Таблица 1
|
mГР кг |
||||||
|
l1, м |
l2, м |
l3, м |
k1, Н/м |
k2, Н/м |
k3, Н/м |
k, Н/м |
|
|
|
|
|
|
|
|
Масса съёмного груза, радиусы шкива и расстояние от оси шкива до фиксирующих отверстий Таблица 2
|
m*, кг |
R, м |
d1, м |
d2, м |
d3, м |
|
|
|
|
|
|
Периоды колебаний маятника Таблица 3
|
T0, с |
T1, с |
T2, с |
T3, с |
|
|
|
|
|
Значение момента инерции Таблица 4
|
I0, кгм2 |
I1, кгм2 |
I2, кгм2 |
I3, кгм2 |
|
|
|
|
|
Масса и расходимость съемных грузов Таблица 5
|
m*, кг |
m, кг |
m, % |
|
|
|
|
5. Расчёт погрешностей измерений
6. Окончательные результаты:
Подписи студентов:
Крюков Н.С.___________
Подуфалов М.М. ___________