

Структура систем ЦОС. Структура систем сбора данных
Структура
цифровых информационно-управляющих
систем (ИУС) для общего случая представлена
на блок-схеме Типовая
цифровая ИУС состоит из четырёх
составляющих систем: 1)
ОУ – объекта управления; 2)
ССД – системы сбора данных; 3)
СОИ – системы обработки информации; 4)
СВУ – системы выработки управления.
системы ОУ,
ССД, СОИ и СВУ-прямоугольники;
стрелки-направления движения входной
и выходной информации. 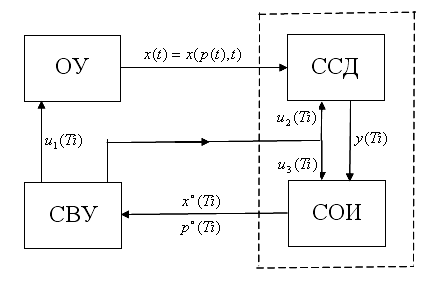
Система ЦОС, являющаяся частью ИУС, состоит из ССД и СОИ и помещена в пунктирный прямоугольник
ОУ
– объект управления
– характеризуется векторами входных
управляющих переменных

 и векторами
выходных переменных, которые в ряде
случаев определяются как векторы фазовых
координат
и векторами
выходных переменных, которые в ряде
случаев определяются как векторы фазовых
координат
 – векторные
параметрические функции.
– векторные
параметрические функции.
. В простейшем случае для статических ОУ связь между входными и выходными переменными определяется модельными нелинейными функциями от нескольких переменных, которые можно представить в скалярном или векторном виде:

 (1.1.1)
(1.1.1)

 . (1.1.2)
. (1.1.2)
Связь между векторами управляющих переменных и векторами фазовых координат для динамических ОУ определяется системами модельных дифференциальных уравнений. Для динамических ОУ с сосредоточенными параметрами модельные дифференциальные уравнения в векторном виде представляются следующим образом:
 .
.
.
{Необходимо
отметить отличия параметрических
функций
 и управляющих
переменных
и управляющих
переменных . Управления
. Управления являются
полностью известными; параметрические
функции
являются
полностью известными; параметрические
функции – некоторые
неизвестные функции, относительно
которых могут быть сведения только об
их самых общих характеристиках.}
– некоторые
неизвестные функции, относительно
которых могут быть сведения только об
их самых общих характеристиках.}
ССД
– система
сбора данных – обеспечивает
промежуточное накопление и предварительную
цифровую обработку многоканальной
информации об объекте управления. На
вход системы ССД поступает вектор
фазовых координат
 и вектор
управления
и вектор
управления , реализующий
настройку ССД. Выходом ССД являются
векторы наблюдений
, реализующий
настройку ССД. Выходом ССД являются
векторы наблюдений фазовых
координат, связанные с фазовыми
координатами
фазовых
координат, связанные с фазовыми
координатами и помеховыми
возмущениями
и помеховыми
возмущениями , которые
обусловливают погрешности в наблюдениях.
Наблюдения описываются следующей
модельной зависимостью:
, которые
обусловливают погрешности в наблюдениях.
Наблюдения описываются следующей
модельной зависимостью: , (1.1.3)
, (1.1.3)
где
вид модельной функции наблюдения
 определяется
конструкцией ССД.
определяется
конструкцией ССД.
СОИ
– система
обработки информации – обеспечивает
по входной информации-наблюдениям от
ССД
 и вектору
управления
и вектору
управления который
предназначен для настройки алгоритмов
СОИ, решение задачи вычисления
оценок фазовых координат
который
предназначен для настройки алгоритмов
СОИ, решение задачи вычисления
оценок фазовых координат и оценок
параметрических функции
и оценок
параметрических функции , которая,
по-существу, является центральной для
ЦОС.
, которая,
по-существу, является центральной для
ЦОС.
СВУ
– система
выработки управлений – осуществляет
формирование необходимых управляющих
воздействий
 для ОУ,
для ОУ, для ССД и
для ССД и для СОИ по
информации от СОИ. В общем виде можно
записать:
для СОИ по
информации от СОИ. В общем виде можно
записать:







 .
.
Структура
ССД существенным образом определяет
возможности проведения ЦОС. ССД состоит
из системы
датчиков, усилителей, противомаскировочных
фильтров, электронных коммутаторов,
аналого-цифровых преобразователей и
устройств буферной памяти.
упрощённой конструкции ССД, цифрами
отмечены основные элементы
системы. 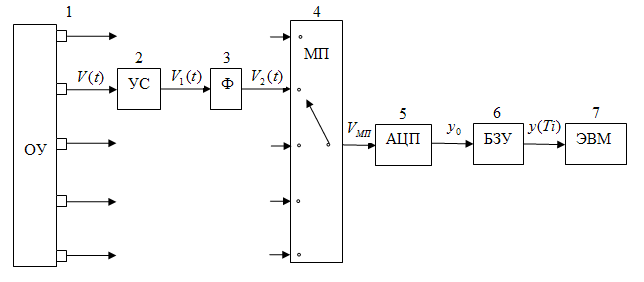
ССД состоит из системы датчиков, усилителей, противомаскировочных фильтров, электронных коммутаторов, аналого-цифровых преобразователей и устройств буферной памяти.
Датчики
назначение
которых состоит в преобразовании
фазовых координат объекта
 в систему
электрических сигналов – выходные
напряжения
в систему
электрических сигналов – выходные
напряжения ,
в которых содержится информация о
параметрах объекта. Каждому датчику
ставится в соответствие функция
преобразования, которая связывает
значение величины
,
в которых содержится информация о
параметрах объекта. Каждому датчику
ставится в соответствие функция
преобразования, которая связывает
значение величины
 со значением
напряжения
со значением
напряжения
Усилители
назначение
данных усилителей cостоит в обеспечении
усиления входных сигналов до
стандартного значения:
 ,
, , чаще всего
, чаще всего Частотные
характеристики передаточной функции
для УС должны быть подобраны таким
образом, чтобы для входного сигнала
Частотные
характеристики передаточной функции
для УС должны быть подобраны таким
образом, чтобы для входного сигнала
 в заданном
частотном диапазоне амплитудные
и фазовые искажения были незначительными.
в заданном
частотном диапазоне амплитудные
и фазовые искажения были незначительными.
Противомаскировочные
фильтры На
вход аналогового противомаскировочного
фильтра подаётся сигнал
 выходной
сигнал фильтра обозначается в виде
выходной
сигнал фильтра обозначается в виде Низкочастотные
аналоговые фильтры (непропускающие
высокие частоты) с передаточными
функциями
Низкочастотные
аналоговые фильтры (непропускающие
высокие частоты) с передаточными
функциями
 обеспечивают
устранение высокочастотных составляющих
в выходном сигнале
обеспечивают
устранение высокочастотных составляющих
в выходном сигнале Как правило,
для противомаскировочных фильтров их
АЧХ в точке среза
Как правило,
для противомаскировочных фильтров их
АЧХ в точке среза
 должны иметь
большую крутизну. Вследствие чего в
рабочей полосе частот
должны иметь
большую крутизну. Вследствие чего в
рабочей полосе частот коэффициент
усиления фильтра должен быть примерно
равен 1, в высокочастотной области
коэффициент
усиления фильтра должен быть примерно
равен 1, в высокочастотной области коэффициент
усиления фильтра должен быть близок к
нулю:
коэффициент
усиления фильтра должен быть близок к
нулю:
 ,
,
 ;
; ,
, .Частота среза
.Частота среза аналогового
фильтра обычно регулируется в
зависимости от полосы исходного сигнала
(его частотных свойств) и заданной
частоты дискретизации.
аналогового
фильтра обычно регулируется в
зависимости от полосы исходного сигнала
(его частотных свойств) и заданной
частоты дискретизации.
Электронные
коммутаторы
Электронный
коммутатор (мультиплексор) реализует
переключение измерительных каналов с
частотой дискретизации
 T
– интервал временной дискретизации
Следует отметить, что использование в
ССД электронного коммутатора не является
обязательным; его применение диктуется
в ряде случаев требованием уменьшения
аппаратурных затрат для снижения числа
микросхем АЦП для трёх информационных
входных каналов, на которые подаются
напряжения
T
– интервал временной дискретизации
Следует отметить, что использование в
ССД электронного коммутатора не является
обязательным; его применение диктуется
в ряде случаев требованием уменьшения
аппаратурных затрат для снижения числа
микросхем АЦП для трёх информационных
входных каналов, на которые подаются
напряжения
 , приведён на
рис. 1.3.7.
, приведён на
рис. 1.3.7.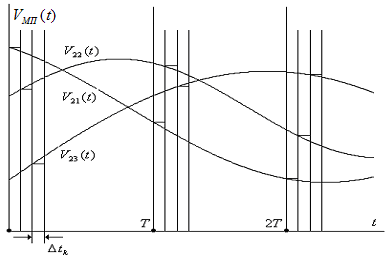
С
временным шагом дискретизации T
происходит запоминание на время
 (время
коммутации) соответствующего
кусочно-постоянного напряжения, которое
предназначено для подачи в устройство
дискретизации. Для работы электронного
коммутатора должно выполняться
соотношение
(время
коммутации) соответствующего
кусочно-постоянного напряжения, которое
предназначено для подачи в устройство
дискретизации. Для работы электронного
коммутатора должно выполняться
соотношение
АЦП
Аналого-цифровые
преобразователи (АЦП) осуществляют
преобразование последовательности
кусочно-постоянных напряжений от
мультиплексора

 в последовательность цифровых кодов
в последовательность цифровых кодов
 .
Следует отметить существенные параметры
АЦП для формирования систем ЦОС: 1)
.
Следует отметить существенные параметры
АЦП для формирования систем ЦОС: 1)
 – время
преобразования АЦП аналогового
напряжения
– время
преобразования АЦП аналогового
напряжения в цифровой
код; очевидно, должно выполняться
неравенство
в цифровой
код; очевидно, должно выполняться
неравенство 2)
2) – число
разрядов цифрового кода с выхода АЦП
(не считая знака); 3)
– число
разрядов цифрового кода с выхода АЦП
(не считая знака); 3) –
рабочий диапазон АЦП по входному
напряжению; этот параметр устанавливается
стандартным рядом значений – чаще всего
–
рабочий диапазон АЦП по входному
напряжению; этот параметр устанавливается
стандартным рядом значений – чаще всего 1 и 5 В.
Последовательность
1 и 5 В.
Последовательность с выхода АЦП
является дискретизованной по времени
и по уровню.
с выхода АЦП
является дискретизованной по времени
и по уровню.
Ус-во
буферной памяти
На вход буферного запоминающего
устройства (БЗУ) поступают данные от
АЦП. БЗУ
обеспечивает промежуточное хранение
массивов дискретизованных данных.
Для БЗУ следует отметить параметры,
существенные при реализации сбора
данных: 1)
 – время ввода
одного кода от АЦП в БЗУ;
– время ввода
одного кода от АЦП в БЗУ; 2) объем памяти
БЗУ –
2) объем памяти
БЗУ – в Кб (Мб), где
б – байт. При формировании конкретной
системы сбора данных необходим учёт
типа памяти БЗУ.
в Кб (Мб), где
б – байт. При формировании конкретной
системы сбора данных необходим учёт
типа памяти БЗУ.
Аппроксимация наблюдений для линейных моделей, действительный и комплексный случай.
наблюдаемый
сигнал
 связан с
исходным сигналом
связан с
исходным сигналом и случайным
помеховым возмущением
и случайным
помеховым возмущением черезмодельную
функцию наблюдения
черезмодельную
функцию наблюдения
 известного
вида
известного
вида


Действительный
случай: есть наблюдения на конечном
временном интервале для
на конечном
временном интервале для Представим
линейную по параметрам модельную
функцию:
Представим
линейную по параметрам модельную
функцию:

 зависящая от
вектора параметров
зависящая от
вектора параметров ,
, в скалярном виде:
в скалярном виде:
функционал
 мера близости
модели и наблюдений, определяется
разностями
мера близости
модели и наблюдений, определяется
разностями
 =
=

 (из-за
линейности S
имеет квадратич. Форму)
(из-за
линейности S
имеет квадратич. Форму)
векторно-матричные переменные:
 ,
,
 ,
, ,
,
где
Y– вектор наблюдений
размерности c– вектор параметров модели размерности
c– вектор параметров модели размерности X– матрица плана сигнала размерности
X– матрица плана сигнала размерности Нетрудно
видеть, что разность для наблюдений и
модели может быть сформирована в
векторном виде
Нетрудно
видеть, что разность для наблюдений и
модели может быть сформирована в
векторном виде
 .
(2.4.5)
.
(2.4.5)
На
основе введённых векторов и матриц
функционал
 записывается
как скалярное произведение и представляет
собой квадратичную форму
записывается
как скалярное произведение и представляет
собой квадратичную форму
 (2.4.6)
(2.4.6)
С
учётом того, что имеет место равенство
 можно записать
можно записать


 =0
;
=0
;

 ;
;
минимальное значение этой квадратичной формы достигается при

 (2.4.7)
(2.4.7)
Представим в виде системы линейных уравнений (в лекциях D=A,d=a)



Введём
обозначения

 МатрицаDимеет размерность
МатрицаDимеет размерность элементы этой
матрицы симметричны относительно
главной диагонали и определяются как
скалярные произведения базисных функций
элементы этой
матрицы симметричны относительно
главной диагонали и определяются как
скалярные произведения базисных функций


Элементы
вектора
 размерности
размерности – коэффициенты
Фурье, вычисляются как взвешенные суммы
наблюдений
– коэффициенты
Фурье, вычисляются как взвешенные суммы
наблюдений
 ,
,

Нахождение
оптимального вектора параметров
 сводится к
решению линейной системы уравнений
сводится к
решению линейной системы уравнений

Комплексный
случай: Рассмотрим
решение задачи оценивания параметров
линейных моделей для комплексных
сигналов. Введём комплексные наблюдения и комплексную
модель сигнала
и комплексную
модель сигнала определяемую
комплексным вектором параметров
определяемую
комплексным вектором параметров и комплексной
базисной функцией
и комплексной
базисной функцией



 Функционал с
использованием суммы произведений
сопряженных комплексных множителей
Функционал с
использованием суммы произведений
сопряженных комплексных множителей
 (2.4.8)
(2.4.8)
комплексную
разность функции наблюдения и модели
 Воспользовавшись
введёнными векторно-матричными
переменными, но в комплексной форме,
представим функционал
Воспользовавшись
введёнными векторно-матричными
переменными, но в комплексной форме,
представим функционал (2.4.8)
(2.4.8)

С
учётом равенства
 запишем
запишем
 (2.4.9)
(2.4.9)
 =0
=0
Минимальное значение этой квадратичной формы (2.4.9) достигается при
 (2.4.10)
(2.4.10)
Оценка
 из (2.4.10) может
быть найдена с помощью решения системы
линейных уравнений (в лекцияхA=D)
из (2.4.10) может
быть найдена с помощью решения системы
линейных уравнений (в лекцияхA=D)


 (2.4.11)
(2.4.11)
Коэффициенты
матрицы Dвычисляются
в виде скалярных произведений векторов


 ,
, (2.4.12)
(2.4.12)
Коэффициенты
вектора b(коэффициенты
Фурье) вычисляются в виде скалярных
произведений векторов


 ,
, (2.4.13)
(2.4.13)
Если базисные функции ортогональны, то нахождение параметров модели упрощается. Матрица Dбудет диагональной с элементами





Оптимальные параметры модели выразятся через коэффициенты Фурье


 (2.4.14)
(2.4.14)
Модели сигналов на основе действительного и комплексного ряда Фурье.
Действительный случай. Рассмотрим построение моделей сигналов на основе действительного ряда Фурье.
Пусть
наблюдения cигнала заданы
в виде действительной функции на конечном
интервале времени
на конечном
интервале времени {Будем полагать,
что для рассматриваемого сигнала
{Будем полагать,
что для рассматриваемого сигнала выполнены
сформулированные условия сходимости.
}
выполнены
сформулированные условия сходимости.
}
Выбирается модель для указанного сигнала в форме действительного ряда Фурье следующего вида

 (2.5.1)
(2.5.1)
модельные
частоты


 и определяются
длиной интервала наблюдения, модельные
синусоиды располагаются с шагом по
частоте
и определяются
длиной интервала наблюдения, модельные
синусоиды располагаются с шагом по
частоте который зависит
от
который зависит
от Вектор
параметров модели имеет бесконечную
размерность,
Вектор
параметров модели имеет бесконечную
размерность,
 {Благодаря
выбору частотного параметра
{Благодаря
выбору частотного параметра оказывается,
что на интервале времени
оказывается,
что на интервале времени укладывает
целое число периодов базисных функций
укладывает
целое число периодов базисных функций и
и Вследствие
этого, указанные} базисные функции
являются ортогональными.
Вследствие
этого, указанные} базисные функции
являются ортогональными.
Функционал
для решения задачи аппроксимации функции
наблюдений
 на основе
сформированной модели имеет вид
на основе
сформированной модели имеет вид


Нахождение вектора параметров модели сводится к минимизации указанного функционала, который, очевидно, является квадратичным по с:
 ,
,

Устремим
число базисных функций в бесконечность,
 Естественно,
можно сразу записать, опустив знак
Естественно,
можно сразу записать, опустив знак формулы для
оптимальных параметров модели, которые
являются известными коэффициентами
разложения Фурье:
формулы для
оптимальных параметров модели, которые
являются известными коэффициентами
разложения Фурье:


 .
.
В
силу ортогональности базисных функций
модели ряда Фурье мощность Pсигнала, сформированного на основе ряда
Фурье, слагается из мощностей составляющих
синусоид мощность дляl‑й синусоиды
определяется амплитудами
мощность дляl‑й синусоиды
определяется амплитудами



 .
.
{Благодаря
ортогональности данного базиса для
рассматриваемой модели возможно
представление дискретного спектра
мощности в виде бесконечной
последовательности равноотстоящих на
 по оси частот
значений
по оси частот
значений }
}
Комплексный
случай.Пусть произведено наблюдение
комплексной функции =y1(t)+jy2(t)
на интервале
=y1(t)+jy2(t)
на интервале модель сигнала
представится комплексным рядом Фурье
модель сигнала
представится комплексным рядом Фурье



 (2.5.5)
(2.5.5)
Комплексный
вектор параметров модели имеет бесконечную
размерность

 Функционал остаточной суммы примет вид
Функционал остаточной суммы примет вид

 (2.5.6)
(2.5.6)
Так
же как и для разд. 2.5.1, ограничимся
конечным числом комплексных модельных
синусоид, которые составляют модель;
пусть число модельных синусоид равняется
L. В этом случае вектор
базисных функций для модели (2.5.5) имеет
размерность и выглядит
следующим образом
и выглядит
следующим образом

на
интервале времени
 составляющие
базис функции ортогональны.
составляющие
базис функции ортогональны.
Оптимальные
параметры модели
 обеспечивающие
минимум функционала (2.5.6) {после того
как сделаны необходимые выкладки и
предельный переход
обеспечивающие
минимум функционала (2.5.6) {после того
как сделаны необходимые выкладки и
предельный переход определяются
следующими интегралами (опущен знак
определяются
следующими интегралами (опущен знак )}:
)}:

 (2.5.7)
(2.5.7)
{Пусть
для рассматриваемой функции сигнала
 выполняются
сформулированные в разд. 2.5.1 условия
сходимости с учётом комплексности.
Тогда на оптимальных
выполняются
сформулированные в разд. 2.5.1 условия
сходимости с учётом комплексности.
Тогда на оптимальных из (2.5.7),
очевидно, должно выполняться равенство
}
из (2.5.7),
очевидно, должно выполняться равенство
}
 (2.5.8)
(2.5.8)
Мощность
l-й комплексной
модельной синусоидальной функции
вычисляется интегрированием на интервале




Благодаря ортогональности используемого комплексного базиса общая мощность сигнала представляется в виде суммы мощностей составляющих как для положительных, так и отрицательных частот.
4.Интеграл Фурье. Свойства интеграла Фурье. (пф-преоб-е Фурье, фс-физический смысл)
Интеграл Фурье реализуется на основе рассмотрения комплексного ряда Фурье для бесконечного временного интервала; Симметричен относительно нуля,меняются только фазовые соотношения
временной
интервал симметричным
 пусть этот
интервал расширяется
пусть этот
интервал расширяется



Запишем
коэффициенты разложения комплексного
ряда Фурье для расширяющегося временного
интервала



Подставим
выражение
 в
в :
:
 .
.
Устремим
 обозначим
обозначим
 получим в
пределе
получим в
пределе
Сформируем
интегралы


Функцию
 называютинтегралом Фурье, илипреобразованиемФурьедля
называютинтегралом Фурье, илипреобразованиемФурьедля прямое и
обратное преоб-е Фурье. Сигнал
представляется как во временной области
при традиционном анализе, так и в
частотной области в виде непрерывных
коэффициентов разложений Фурье
прямое и
обратное преоб-е Фурье. Сигнал
представляется как во временной области
при традиционном анализе, так и в
частотной области в виде непрерывных
коэффициентов разложений Фурье

ФC :Преоб-е
Фурье
:Преоб-е
Фурье -предельная
функция коэффициентов комплексного
ряда Фурье.
-предельная
функция коэффициентов комплексного
ряда Фурье.
Функция
 в общем случае
является комплексной функцией частоты
и допускает следующие представления:
в общем случае
является комплексной функцией частоты
и допускает следующие представления:





где
 и
и – действительные
и мнимые части;
– действительные
и мнимые части;
 – модуль и
фаза преобразования Фурье.
– модуль и
фаза преобразования Фурье.
Св-ва:
1. Линейность.Пусть функция представляет
собой взвешенную сумму функций
представляет
собой взвешенную сумму функций для которых
заданы их преобразования Фурье
для которых
заданы их преобразования Фурье

 преоб-е Фурье
преоб-е Фурье для
для вычисляется
как взвешенная сумма преобразований
Фурье
вычисляется
как взвешенная сумма преобразований
Фурье :
:

2.
СдвигПусть– масштабирующий множитель, преобразующий
функцию в
в
 и
и
 -?
-?


Пусть:

 сделаем
подстановку в
сделаем
подстановку в и выразим
и выразим через
через :
:



3. СдвигПусть задано преобразование
Фурье для функции
 Введём
запаздывание(сдвиг
по времени) для функции
Введём
запаздывание(сдвиг
по времени) для функции сформируем
сформируем






преобразование
Фурье для функции
 умноженной
на
умноженной
на сдвигается
по частоте
сдвигается
по частоте



4. Прео-е
Фурье от комплексной синусоиды
 требует
предварительного определения-функции.
требует
предварительного определения-функции.
{ Импульсной-функциейназывается такая функция, которая удовлетворяет следующим двум условиям:
1)  для
для и
и для
для
2)  для любого
для любого
Импульсная
-функция может
рассматриваться как предел обычной
функции при
при Например,
Например,
 для
для
 и
и для
для
Для -функции устанавливается важное равенство:


если
 непрерывна в
точке
непрерывна в
точке и
и }
}
С
учётом сделанного определения можно
записать преобразование Фурье для




ФС:
если синусоида определена на
 интервале, ее энергия бесконечна.
След-во в ПФ везде нули.
интервале, ее энергия бесконечна.
След-во в ПФ везде нули.
6. ПФ для симметричного единичного импульса:

 ,
,







Едичный
импульс симметричен
 преобразование Фурье
преобразование Фурье является
действительной функцией.
является
действительной функцией.
7.
ПФ для произведения функций
 – ПФ
– ПФ


Изменив порядок интегрирования, с учётом выражения интеграла Фурье для комплексной синусоиды получим
Cy(w)=

 Преобразование Фурье от произведения
функций равняется свёртке преобразований
Фурье сомножителей.
Преобразование Фурье от произведения
функций равняется свёртке преобразований
Фурье сомножителей.
5.Дискретизация непрерывных сигналов. Теорема Котельникова. Кажущиеся частоты и протимаскировочная фильтрация.
Положим,
что задан исходный непрерывный сигнал
 который
является в общем случае комплексным
и определённым в бесконечных временных
пределах. Для данного сигнала производится
дискретизация во времени, гдеT– интервал дискретизации;
который
является в общем случае комплексным
и определённым в бесконечных временных
пределах. Для данного сигнала производится
дискретизация во времени, гдеT– интервал дискретизации; – дискретные
значения непрерывного сигнала;
– дискретные
значения непрерывного сигнала; – частота
дискретизации, Гц;
– частота
дискретизации, Гц; – круговая
частота дискретизации. При фиксированном
временном интервалеT,
дискретизация осуществляется равномерно
для моментов времени
– круговая
частота дискретизации. При фиксированном
временном интервалеT,
дискретизация осуществляется равномерно
для моментов времени {Дискретизация
может производиться неравномерно для
произвольных моментов времени
{Дискретизация
может производиться неравномерно для
произвольных моментов времени и её результатом
служит соответствующая последовательность
дискретных значений непрерывного
сигнала
и её результатом
служит соответствующая последовательность
дискретных значений непрерывного
сигнала Здесь} будем
рассматривать только равномерную
дискретизацию во времени; пренебрежём
погрешностями, возникающими из-за
дискретизации по уровню.
Здесь} будем
рассматривать только равномерную
дискретизацию во времени; пренебрежём
погрешностями, возникающими из-за
дискретизации по уровню.
Задача
восстановления непрерывного сигнала
 по его дискретным
значениям
по его дискретным
значениям задача
интерполяции. Восстановление сигнала
здесь состоит в том, что по бесконечной
последовательности дискретных значений
сигнала
задача
интерполяции. Восстановление сигнала
здесь состоит в том, что по бесконечной
последовательности дискретных значений
сигнала
 необходимо
найти значения непрерывного сигнала
для промежуточных моментов времени
необходимо
найти значения непрерывного сигнала
для промежуточных моментов времени
Исходный
сигнал
 принадлежит
к некоторому заданному классу функций;
допустим, что можно подобрать, у базисные
функции
принадлежит
к некоторому заданному классу функций;
допустим, что можно подобрать, у базисные
функции

 В качестве
восстановленного сигнала
В качестве
восстановленного сигнала для
для примем предел
примем предел




Задача восстановления может считаться успешно решённой, если будет выполнено равенство

 (3.4.1)
(3.4.1)
{Возможность восстановления сигнала по его дискретизованным значениям зависит от частотных свойств сигнала и выбранной частоты дискретизации. Высокая частота дискретизации, очевидно, позволит осуществить восстановление сигнала; для низкой частоты дискретизации восстановление в ряде случаев проблематично. }
Появление
«кажущихся» частот Неправильно
выбранная частота дискретизации, которая
не согласована с частотными свойствами
сигналов, приводит к появлению так
называемых «кажущихся» частотных
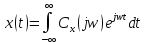
составляющих.Разберём пример, в
котором дискретизации подвергается
непрерывный синусоидальный сигнал вида с периодом
с периодом На рис.
исходный сигнал
На рис.
исходный сигнал изображен
сплошной линией.
Подвергнем исходный непрерывный
сигнал
изображен
сплошной линией.
Подвергнем исходный непрерывный
сигнал дискретизации
с частотой
дискретизации
с частотой – четыре точки
дискретизации на один период
– четыре точки
дискретизации на один период интервал
дискретизации
интервал
дискретизации
 Дискретизованные
значения исходного сигнала отмечены
чёрными жирными точками.Уменьшим частоту
дискретизации, примем её равной
Дискретизованные
значения исходного сигнала отмечены
чёрными жирными точками.Уменьшим частоту
дискретизации, примем её равной период
дискретизации
период
дискретизации эти точки
дискретизации отмечены кругами
на пунктирной линии. В первом случае
частота дискретизации больше двойной
частоты сигнала, дискретизованный
сигнал воспринимается как сигнал с
периодом
эти точки
дискретизации отмечены кругами
на пунктирной линии. В первом случае
частота дискретизации больше двойной
частоты сигнала, дискретизованный
сигнал воспринимается как сигнал с
периодом и его «кажущаяся»
частота совпадает с частотой исходного
сигнала
и его «кажущаяся»
частота совпадает с частотой исходного
сигнала . Во втором
случае частота дискретизации меньше
двойной частоты сигнала, дискретизованный
сигнал воспринимается как сигнал с
периодом
. Во втором
случае частота дискретизации меньше
двойной частоты сигнала, дискретизованный
сигнал воспринимается как сигнал с
периодом и его кажущаяся
частота меньше частоты исходного сигнала
и его кажущаяся
частота меньше частоты исходного сигнала Вследствие
неудачного выбора частоты дискретизации
имеет место очень сильное искажение
информации, «кажущаяся» частота
сигнала меньше частоты исходного
сигнала, что и видно из рис. 3.4.1.
Вследствие
неудачного выбора частоты дискретизации
имеет место очень сильное искажение
информации, «кажущаяся» частота
сигнала меньше частоты исходного
сигнала, что и видно из рис. 3.4.1.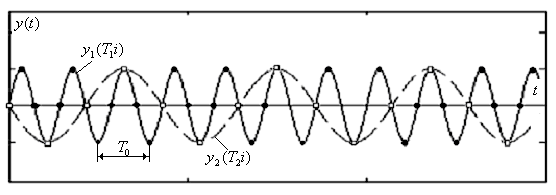
Рассмотрим
более детально существо проблемы
возникновения «кажущихся» частотных
составляющих для дискретной синусоидальной
функции
 Введём частоту
Найквиста, равную половине частоты
дискретизации,
Введём частоту
Найквиста, равную половине частоты
дискретизации, Всегда можно
представить
Всегда можно
представить где
где – целое,
– целое, Учитывая
равенство
Учитывая
равенство запишем:
запишем:

1)
частота Найквиста больше частоты сигнала
–
 тогда
тогда и справедливо:
и справедливо:
 ветствует значению -чай -частота
Следует, что
ветствует значению -чай -частота
Следует, что
 и
и – «кажущаяся»
частота совпадает с частотой исходного
сигнала. 2) частота Найквиста меньше
частоты сигнала – в частном случае
положимpчетным,
– «кажущаяся»
частота совпадает с частотой исходного
сигнала. 2) частота Найквиста меньше
частоты сигнала – в частном случае
положимpчетным, при этом
при этом и
и Оказывается,
что во втором примере «кажущаяся»
частота меньше частоты исходного
сигнала. Данные примеры позволяют
сделать заключение, что для совпадения
частоты сигнала и «кажущейся» частоты,
частота Найквиста должна быть больше
частоты дискретизуемого сигнала.
Оказывается,
что во втором примере «кажущаяся»
частота меньше частоты исходного
сигнала. Данные примеры позволяют
сделать заключение, что для совпадения
частоты сигнала и «кажущейся» частоты,
частота Найквиста должна быть больше
частоты дискретизуемого сигнала.
Теорема Котельникова
Установим
возможность точного восстановления
непрерывных сигналов по их дискретным
значениям. В рамках теоремы Котельникова
рассматриваются сигналы, принадлежащие
к классу сигналов с финитным
преобразованием Фурье. Сигнал имеет финитное
преобразование Фурье, обозначаемое
как
имеет финитное
преобразование Фурье, обозначаемое
как если: 1)
если: 1) для всех частот
для всех частот 2)
2) тождественно не равно нулю для частот
тождественно не равно нулю для частот где
где – верхнее
значение частоты сигнала – полоса
сигнала. Теорема Котельникова утверждает,
что для сигналов с финитным преобразованием
Фурье возможно точное восстановление
сигнала по дискретным наблюдениям,
если круговая частота дискретизации
– верхнее
значение частоты сигнала – полоса
сигнала. Теорема Котельникова утверждает,
что для сигналов с финитным преобразованием
Фурье возможно точное восстановление
сигнала по дискретным наблюдениям,
если круговая частота дискретизации удовлетворяет
строгому неравенству
удовлетворяет
строгому неравенству где
где
 – полоса сигнала, Гц,
– полоса сигнала, Гц,
Представим
исходный сигнал
 на основе
обратного преобразования Фурье,
если
на основе
обратного преобразования Фурье,
если – финитное
преобразование Фурье:
– финитное
преобразование Фурье:

Возьмём
 разложим
функцию
разложим
функцию в комплексный
ряд Фурье на данном интервале
в комплексный
ряд Фурье на данном интервале


 (3.4.2)
(3.4.2)
Учитывая
введённое соотношение между величинами
 и
и запишем
запишем

 (3.4.3)
(3.4.3)
Справедливо равенство, вытекающее из (3.4.2), (3.4.3), связывающее дискретные значения сигнала и коэффициенты фурье-разложения

Подставим
коэффициенты фурье-разложения
 в выражение
для
в выражение
для из (3.4.2):
из (3.4.2):

 (3.4.4)
(3.4.4)
Подставим
выражение (3.4.4) в ( 3.4.3)
Переменим
порядок интегрирования и суммирования

Сделаем
замену
 при этом
частота дискретизации окажется равной
при этом
частота дискретизации окажется равной и переобозначим
индексы суммирования
и переобозначим
индексы суммирования

 Сигнал
Сигнал может быть
представлен в виде разложения по базисным
функциям
может быть
представлен в виде разложения по базисным
функциям с весовыми
коэффициентами
с весовыми
коэффициентами :
:



Таким
образом, в соответствии с теоремой
Котельникова сигнал с финитным
преобразованием Фурье с полосой
 при выборе
частоты дискретизации
при выборе
частоты дискретизации допускает
точное восстановление – выполнение
равенства (3.4.1).
допускает
точное восстановление – выполнение
равенства (3.4.1).
Противомаскировочные фильтры Устранение эффекта маскировки (наложения) может быть реализовано двумя способами.
устранение может быть осуществлено с помощью назначения высокой частоты дискретизации, которую необходимо выбрать таким образом, чтобы её величина была бы более чем в два раза больше, чем значение полосы сигнала.
если по некоторым техническим причинам нельзя назначить высокую частоту дискретизации, то исходный непрерывный сигнал, прежде чем подвергнуть дискретизации, следует пропустить через аналоговый низкочастотный фильтр с частотой среза
 и с АЧХ,
изображенной на рис. 1.3.6. В
отфильтрованном сигнале не должны
содержаться составляющие с
частотой выше, чем указанная частота
среза
и с АЧХ,
изображенной на рис. 1.3.6. В
отфильтрованном сигнале не должны
содержаться составляющие с
частотой выше, чем указанная частота
среза Низкочастотный
фильтр должен отсечь неинформативные
(помеховые) высокочастотные
составляющие сигнала. Для частоты
дискретизации подобным образом
отфильтрованного сигнала необходимо
выполнение неравенства
Низкочастотный
фильтр должен отсечь неинформативные
(помеховые) высокочастотные
составляющие сигнала. Для частоты
дискретизации подобным образом
отфильтрованного сигнала необходимо
выполнение неравенства
Указанная фильтрация называется противомаскировочной, а используемые аналоговые фильтры –противомаскировочными.
Рис. 1.3.6. АЧХ противомаскировочного фильтра