

PDF / МСиР ГОГС_Методы создания_Тема 6END
.pdfТема 6. Методы построения прецизионной государственной геодезической сети с использованием глобальных спутниковых навигационных систем: Методика составления проекта спутниковой сети. Выбор аппаратуры, метода наблюдений. Методика наблюдений спутниковой сети. Полевые контроли. Объединение спутниковых и традиционных геодезических сетей. Функциональные и стохастические модели наблюдений. Свободное, минимально ограниченное и ограниченное уравнивание. Тестирование результатов уравнивания
6.1. Структура сигналов ГНСС
Псевдошумовые сигналы. Чтобы нести информацию, такую как дальномерные коды и цифровая информация, простая синусоидальная волна должна модулироваться. В случае ГНСС модуляция делает возможным измерение расстояний посредством измерения времени прохождения модуляции, то есть дальномерных кодов.
Дальномерные коды состоят из бинарных цифр 0 и 1. Эти бинарные цифры называются также чипами, битами или импульсами. Последовательность бинарных цифр в потоке передаваемых данных обычно является псевдослучайной последовательностью (ПСП), которая может выглядеть как случайный сигнал, но которая в действительности следует некоторой математической формуле и может многократно воспроизводиться средствами электроники. Такие сигналы называют псевдослучайными кодами (Pseudo Random Code). Они воспринимаются как случайный шум (вспомните «снег» на экране телевизора или шум в приемнике, когда нет передачи). Эфир пронизан такими шумами естественного или искусственного происхождения. Однако благодаря строгой закономерности образования ПСП, их удается выделить из общего шума, даже при их малой мощности (как разговор под гул самолета). Важным показателем ПСП является отношение сигнал/шум SNR. Приемник будет работать лучше при большем SNR. Псевдошумовые последовательности создаются с помощью сдвиговых регистров (СР) с обратной связью [Серапинас 2002; Конин 2006, Leick 1996].
Распространенный в ГНСС метод состоит в объединении двух бинарных потоков данных в один посредством сложения по модулю 2 и умножения по модулю 2. Сложение
происходит по правилу: |
|
1 1 = 0, |
0 1 = 1, 1 0 = 1, 0 0 = 0. |
Правило умножения: |
|
0 0 = 1, 1 0 = 0, 0 0 = 0, 1 1 = 1.
На рис. 3 показаны два потока произвольных цифровых данных, (a) и (b), объединяемых в один поток (a+b) сложением по модулю 2. Предположим, что последовательность (а) представляет C/A или P(Y) дальномерный код с тактовой частотой соответственно 1.023 или 10.23 МГц, а поток (б) представляет навигационные данные с тактовой частотой 50 бит в секунду. Заметим, что поток навигационных данных и кодовый потоки имеют существенно различающиеся тактовые частоты, и что моменты передачи бита перехода согласованы. Тактовая частота в 50 бит в секунду подразумевает 50 возможностей в секунду для того, чтобы цифровой поток изменялся с 1 на 0 и наоборот. В течение одного чипа навигационного сообщения происходит 31508400 циклов несущей, 20460 чипов C/A кода заполняют один чип телеметрии, и необходимо 204600 чипов P кода, чтобы сделать то же самое. Таким образом, как только в 50-битовом потоке данных навигационного сообщения встречается бинарная 1, сложение по модулю 2 превращает 20460 смежных цифр C/A кода в обратный код, когда бинарная 1 становится 0 и наоборот. Бинарный 0 навигационного сообщения оставляет следующие 20460 C/A кодов неизмененными.

Рис. 3. Сложение по модулю 2 двух псевдослучайных последовательностей.
Нетрудно видеть, что в новом псевдослучайном коде отдельные части исходного кода остались неизменными, в других частях код сменился на обратный. Кроме того, если код (a+b) сложить по модулю 2 с кодом (a), то получим исходный код (b).
Чтобы передавать информацию, на спутнике производится модуляция несущей кодовой последовательностью методом манипуляции фазовым сдвигом (умножением по модулю 2). В результате получается фазоманипулированная несущая, то есть та же несущая, но с резкими изменениями фазы (рис. 4). Предположим, что приемник принял несущую, промодулированную навигационным сообщением. Но ГНСС приемники могут создавать синусоидальный сигнал, в том числе и с частотой несущих колебаний. В результате перемножения этих двух сигналов в приемнике будет получено исходное навигационное сообщение.
Рис. 4. Модуляция несущей псевдослучайным кодом.
К методу сложения по модулю 2 должен быть добавлен еще один дополнительный шаг, поскольку несущая L1 модулируется тремя потоками данных: навигационными данными и кодами C/A и P(Y). В этом случае возникает проблема наложения (суперпозиции) дальномерных кодов на поток навигационных данных. Две последовательных суперпозиции не являются единственными, потому что C/A код и P(Y) код имеют идентичные биты эпох перехода (хотя их длины различные). Решением является манипуляция с квадратурным фазовым сдвигом. Несущая делится на два компонента, один из компонент опережает другой на 90. Один компонент модулируется суммой по модулю 2 навигационного сообщения и C/A кода, другой – суммой навигационного сообщения и P(Y) кода. Перед трансляцией оба потока объединяются в сумматоре (рис. 5).
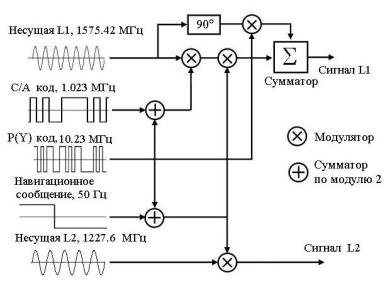
Рис. 5. Формирование радионавигационных сигналов L1 и L2 в системе GPS.
Система GPS. Спутники GPS передают свои навигационные сигналы на двух несущих частотах L-диапазона. На этих частотах сигналы являются высоко направленными и, следовательно, они легко блокируются непрозрачными предметами, а также отражаются твердыми телами и водной поверхностью. Частота L1=1575.42 МГц (длина волны =19 см), получается путем умножения частоты задающего генератора на 154 и модулируется C/A и P-кодами. Частота L2=1227.60 МГц (длина волны =24 см) получается умножением частоты задающего генератора на 120 и модулируется P-кодом. Третий гражданский сигнал, обозначаемой как L5, начал передаваться спутниками Блока IIF на частоте 1176.45 МГц (длина волны около 25.5 см). Коды C/A и P являются дальномерными кодами, они используются для измерения времени прохождения сигналаи последующего получения дальности = c . Передачи на двух (или трех) частотах позволяют уверенно определить ионосферную поправку и повысить точность измерений.
Коды C/A (Clear Aquisition – полностью доступный) и P (Precise – точный) представляют собой бинарные коды, то есть последовательность из единиц и нулей. Они имеют характеристики случайного естественного шума, но в отличие от последнего легко воспроизводятся средствами электроники. Благодаря этому их удается выделить из общего шумового фона, а сами коды называют псевдо-случайными кодами (Pseudo Random Code). Каждому спутнику GPS соответствует своя последовательность кодов, по которой спутник отождествляется приемником. При этом необходимо, чтобы уровень сигнала превышал уровень шума в несколько раз (Signal to Noise Ratio, SNR).
Оба кода формируются от генератора 10.23 Мгц, C/A-код – с делением частоты на 10, P-код - без изменения частоты. Поэтому один элемент P-кодовой последовательности имеет продолжительность около 100 нс, что соответствует 30 м, а у C/A-кода - соответственно 1 мкс и 300 м. За счет интерполяции разрешающая способность может быть доведена по P-коду до 1 м, а по C/A-коду - до 10 м. P-код не повторяет сам себя в течение 267 суток, это дает каждому спутнику использовать свою уникальную недельную последовательность PRN. C/A-код повторяется каждую миллисекунду, поэтому в измерениях расстояния возникает неоднозначность, кратная 300 км.
Система ГЛОНАСС. Каждый КА системы ГЛОНАСС передает сигналы на собственных частотах в двух частотных поддиапазонах L1 и L2. На поддиапазоне L1 передаются сигналы стандартной и высокой точности. Сигнал стандартной точности с тактовой частотой 0.511 Мгц предназначен для всеобщего использования. Сигнал высокой точности на L1 модулирован специальным кодом и не рекомендуется к использованию без разрешения Министерства обороны РФ. На поддиапазоне L2
передаются сигналы, модулированные специальными кодами, и они не рекомендуются к несанкционированному использованию.
Навигационный сигнал на частоте L1 является многокомпонентным фазомодулированным сигналом. Манипуляции осуществляются на 180 . Несущая частота модулируется двоичной последовательностью, образованной суммированием по модулю два псевдослучайного дальномерного кода, цифровой информации навигационного сообщения и вспомогательного меандрового колебания. Основой для формирования компонентов сигнала является бортовой стандарт частоты 5 Мгц.
Псевдослучайный дальномерный код представляет последовательность максимальной длины регистра сдвига (М-последовательность) с периодом 1 мс и скоростью передачи символов 511 Кбит/с. Псевдослучайный дальномерный код снимается с 7 разряда 9-разрядного регистра сдвига. Код начального состояния сдвига соответствует наличию «1» во всех разрядах регистра. Начальным символом в периоде псевдослучайного дальномерного кода является первый символ в группе 111111100, повторяющийся через 1 мс.
Сигналы спутников ГЛОНАСС, как и у спутников GPS, имеют правостороннюю круговую поляризацию [Глобальная … 2002; Болдин и др. 1999].
6.2. Приемники сигналов ГНСС, их классификация, характеристики
6.2.1. Типы приемников по методу действия
Кодовые приемники. Эти приемники определяют положение, обрабатывая информацию, содержащуюся в коде, который передается спутниками. Преимущество этого метода в его низкой стоимости. Недостатком является сравнительно низкая точность
– порядка 5 м или хуже.
Фазовые приемники. Эти приемники определяют положение путем обработки измерений фазы несущей волны, наблюдаемой в течение некоторого времени. У них не нужно декодировать переданную информацию, за исключением данных о положениях спутников. Некоторые такие приемники не имеют возможности принимать коды вообще, в этом случае приемник должен предварительно загружаться данными из другого источника. Преимущество этого метода – его высокая точность. Такие приемники могут обеспечивать сантиметровый уровень точности даже в реальном времени, когда используются дифференциальные поправки. Недостаток – их высокая стоимость.
6.2.2.Типы приемников по их применению
Ручные приемники общего назначения. Навигационные приемники наиболее простые и дешевые. Они обеспечивают определение координат в абсолютном режиме, в реальном времени. Они могут быть одно- и многоканальными, одно- и двухчастотными, работающими по GPS или ГЛОНАСС'у, или по обеим системам. Они обеспечивают данными невысокой точности, порядка 10-15 м в лучшем случае. Эти приемники характеризуются малыми размерами и портативностью, питаются от батарей и имеют встроенный дисплей. Дисплей обычно на жидких кристаллах, имеет низкое потребление питания и может быть либо буквенно-цифровым, либо графическим. Некоторые из этих приемников могут иметь возможность выводить на дисплей авиационные или морские карты с карт данных. Антенна может быть внешней для установки вне средства передвижения.
Приемники для определения ориентировки. Эти приемники используются для определения трехмерного положения объекта относительно Земли. Такие приемники используют несколько антенн, относительное расположение которых должно быть известно.
Авиационные приемники. Эти приемники оптимизированы для применения в авиационной навигации и могут выводить на дисплей навигационные карты. Эти приемники обычно работают совместно с другой аппаратурой воздушного судна (авионикой). Их точность изменяется в зависимости от класса воздушных судов, на которых прибор планируется использовать.
Приемники для навигации автомобилей, информационных систем дорожных средств и управления парками дорожных средств.
Эти приемники устанавливаются на автомашинах, грузовиках, на поездах. Назначение приемников может изменяться в зависимости от применения, но характеристики будут подобными. Приемники, используемые на автомашинах, служат для навигации шофером или для отсылки сообщения в службу спасения (при несчастном случае). GPS приемники, используемые в автобусах, грузовиках и на поездах, предназначаются, главным образом, для отслеживания диспетчерскими службами.
Морские приемники. Эти приемники предназначены для навигации на море, у них есть возможность выводить на экран морские карты и соединяться с другим навигационным оборудованием.
OEM (Original Equipment Manufacturer – Оригинальное оборудование изготовителя).
Такие приемники предназначены для установки на другом оборудовании. Они поступают от изготовителя как стойка с клавиатурой или модуль, без дисплея.
Космические приемники. Эти приемники используются на спутниках, как для навигации, так и для определения ориентировки. Они могут быть защищенными от излучений и иметь специальные программы, позволяющие им работать на высоких скоростях, вызванных орбитальным движением космического аппарата.
Топографические приемники служат для составления карт и сбор данных о местности. Навигационно-топографические приемники обычно имеют точность на уровне от 10 м до 1 дм при расстояниях до 50 - 500 км, что достигается дифференциальным режимом работы. Они могут быть кодовыми и кодо-фазовыми. Последние имеют более высокую точность, но ограничены по дальности. Такие приемники оптимальны для сбора данных и пересылки их во внешнюю базу данных. Они часто объединяют умеренную точность автономных определений с возможностью ее повышения дифференциальным методом до 1 м. Их можно использовать вместе с компьютером для сбора и обработки данных. В такие компьютеры можно заранее загружать библиотеку с описанием особенностей объектов съемки, тогда оператору остается выбирать из библиотеки подходящий тип объекта, положение которого определяется. Такие приемники можно нести в руках, у них малые батареи, а антенна крепится к рюкзаку за спиной.
Геодезические приемники. Такие приемники предназначены для высокоточных измерений. Такие приемники должны иметь антенны для установки на штативе и иметь возможность переключать питание в процессе работы.
Постоянно повышающаяся точность аппаратуры стирает грань между навигационнотопографической аппаратурой и чисто геодезической. Фазовые приемники отличаются по числу каналов, они могут быть одно- и двухчастотными, а также работающими по одной или двум СНС. Двухчастотные фазовые приемники наиболее полно обеспечивают все разнообразие возможностей спутниковой аппаратуры и дают наиболее точные результаты на расстояниях до нескольких тысяч километров. Наличие двух частот обеспечивает точный учет влияния ионосферы. Одночастотные фазовые приемники более простые и менее точные, их область применения - построение опорных сетей и землеустройство.
Приемники для определения и хранения времени. Эти приемники позволяют определять время с точностью до наносекунды за счет сравнения собственной шкалы времени, основанной на работе сравнительно дешевых кварцевых или рубидиевых генераторов, со шкалой времени спутников, определяя временную задержку по своему точному положению и орбите спутника.

6.2.3. Устройство приемников и принципиальные схемы обработки информации на станции
Общее устройство приемника. Спутниковые приемники являются очень сложными электронными приборами, не случайно их часто называют «системами». В России к приемникам отечественного производства часто применяется термин «приемоиндикатор». Автор ставит целью не описание электроники приемника устройства, а объяснение принципов получения результатов измерений, необходимых для решения задач геодезии или навигации.
Любой ГНСС приемник должен собирать и затем преобразовывать сигналы от спутников в измерения. Вращающийся вокруг Земли спутник передает этот слабый сигнал в конусе с раскрытием примерно 30. Со спутника, имеющего высоту около 20000 км, конус охватывает всю планету. Спутник распространяет сигнал низкой мощности на большой площади. Сигнал мог бы полностью затенен множеством электромагнитных шумов, которые окружают нас, если бы он не был кодированным сигналом с широким спектром. Передаваемые спутниками сигналы намеренно занимают широкую полосу частот. Эти характеристики используются для предотвращения подавления сигналов, уменьшения многопутности и позволяют вести слежение за спутником.
Прежде всего, приемник должен выделить сигнал нужного спутника среди сигналов других спутников, сделать его захват и отслеживать на протяжении нужного времени. Затем ему нужно выполнить операции, обратные тем, которые выполнялись на спутнике в процессе закладки информации, то есть произвести демодуляцию и декодирование принятых сигналов, расшифровать переданное со спутника навигационное сообщение, произвести измерения необходимых величин и обработать их. При этом приемник может столкнуться с такими проблемами как защита от помех высокой мощности (например, от ионосферных возмущений), выделение секретного кода, ключа к которому у него может не быть, разрешение многозначности в измерениях и др. Приемник должен управлять всем процессом измерений, следить за состоянием других устройств, например, источников питания и памяти, состоянием созвездия спутников и обо всем информировать оператора.
На рис. 6 показаны основные компоненты, общие для всех ГНСС приемников.
Рис. Блок-схема общего устройства геодезического приемника.
Антенна и предусилитель. Антенна принимает радиоволны с правосторонней круговой поляризацией от спутников, находящихся над горизонтом. Ее главной функцией является преобразование электромагнитных волн в электрические токи, содержащие информацию о кодах и модуляциях потока данных. Очень важны размер и форма
антенны, так как эти характеристики управляют, в частности, способностью антенны принимать радиоволны в нужном диапазоне частот и передавать в приѐмник очень слабые сигналы спутников ГНСС. Многие приемники имеют встроенные антенны, другие имеют внешние антенны, которые могут устанавливаться на штативе или монтироваться на транспортном средстве. Антенны, используемые для ГНСС приемников, имеют характеристики всенаправленных антенн, их не нужно наводить на источник сигнала. В случае геодезических измерений действительным определяемым положением является фазовый центр антенны, который должен быть корректно связан с координируемой наземной маркой.
Внешние антенны соединяются с приемником коаксиальными соединительными кабелями, имеющими стандартную длину от 1,5 до 60 м. Обычно они поставляются изготовителем приемников. По этому же кабелю подается напряжение для электроники антенны. Одно из требований к кабелю – его морозоустойчивость. К сожалению, некоторые антенные кабели, как и кабели для питания, могут ломаться на морозе. Во многих современных приемниках вместо кабелей используют радиосвязь Bluetooth или
WiFi(рис. 7).
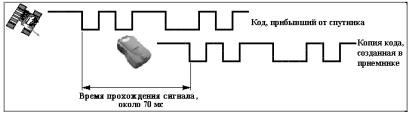
Измерение псевдодальности и фазы несущей. В большинстве приемников первой процедурой обработки входящего сигнала спутника является синхронизация C/A кода, принятого от спутника на L1, с копией C/A кода, созданной самим приемником. Этот процесс известен как измерение фазы кода. Когда нет начального совпадения между кодом спутника и копией от приемника, то время приемника сдвигается и находится код, который он создает до тех пор, пока не наступает оптимум корреляции, то есть совпадения двух сигналов (рис.10). Затем петля слежения за кодом удерживает их совмещенными. Временной сдвиг , обнаруженный в этом процессе, является мерой времени прохождения сигнала от спутника до фазового центра антенны. Умножение этой временной задержки на скорость света c дает псевдорасстояние:
P c . |
(2) |
Рис. Измерение временной задержки по корреляции двух ПСП.
Полученное псевдорасстояние (или псевдодальность) отличается от действительного расстояния тем, что часы в приемнике и на спутнике в общем случае не синхронизированы и идут с несколько разным ходом. Кроме того, скорость света в атмосфере отличается от его скорости в вакууме, поэтому измерения дальностей содержат систематические ошибки, которые необходимо исправлять. Поскольку чипы в последовательности кодов спутника генерируются в точно известные моменты времени, совмещение последовательностей кодов спутника и приемника также дает отсчет по часам спутника в момент генерации сигнала.
Подобным образом измеряется P-кодовая псевдодальность, но из-за того, что последовательность Р-кода слишком длинная, цепи отслеживания Р-кода необходима помощь в установке ее генератора кодов близко к правильному месту для получения быстрого захвата сигнала спутника. Она получает эту помощь по Z отсчету, содержащемуся в слове HOW навигационного сообщения.
Многозначность C/A кодовой псевдодальности. В C/A кодовой псевдодальности содержится многозначность. В отличие от целой многозначности, связанной с измерением

расстояния по фазе несущей, эта многозначность просто разрешается приемником в радиочастотном блоке. Во всяком случае, напомним, что весь C/A код от любого спутника повторяется каждую миллисекунду. Время прохождения сигнала от приемника до спутника занимает от 66 до 87 миллисекунд. Поэтому здесь должно быть от 66 до 87 полных периодов C/A кода в переходе между спутником и приемником в любой заданный момент (рис. 11).
Рис. Период C/A кода укладывается в расстоянии до спутника от 66 до 87 раз.
Иными словами, тактовая частота C/A кода, то есть темп, с которым каждый чип модулируется на несущую, равна 1.023 Мб/с. Это значит, что при скорости света длина одного чипа примерно 300 м. Но весь период C/A кода равен 1023 чипам, или 1 мс, то есть примерно 300 км.
Эти повторяющиеся периоды C/A кода можно считать «линейками», простирающимися от спутника к приемнику. Каждая линейка имеет длину около 300 км с делениями в 300 м. Поэтому должно быть от 66 до 87 таких линеек между спутником и приемником. Таким образом, сырое наблюдение должно еще корректироваться путем добавления соответствующей величины, кратной 300 км, чтобы получить действительную псевдодальность. Это и есть целая многозначность C/A кода.
Как только приемник использовал навигационное сообщение и измерил псевдодальность по C/A коду, он также может выделить навигационное сообщение, прочитать эфемериды и информацию из альманаха, использовать время GPS, и для тех приемников, которые могут использовать P код, применяя слово передачи HOW на каждом подкадре как указатель для отслеживания точного кода. Но пока лишь несколько изготовителей нашли способы находить псевдодальности по P(Y) кодовым наблюдениям, поскольку зашифрованный Y код доступен только авторизованным пользователям. К сожалению, ни C\A кодовые, ни P кодовые псевдодальности удовлетворяют точности для большинства геодезических применений. Поэтому следующий шаг в обработке сигнала для геодезических приемников состоит в наблюдении фазы несущей.
Как утверждалось ранее, как только они производят копию входящего кода, большинство приемников также производят копию входящей несущей волны. И основа измерений фазы несущей является комбинация этих двух частот. Напомним, входящий сигнал от спутника подвержен изменяющемуся доплеровскому сдвигу, в то время как копия в приемнике номинально постоянная.
Процесс начинается после того, как псевдадальность по C/A коду измерена, и петля слежения кода закрыта. Путем смешения сигнала спутника с копией несущей исключаются все фазовые модуляции, и создаются две промежуточных частоты или частоты биений. Как упоминалось ранее, одна из них является суммой комбинируемых частот, а другая - разностью частот. С помощью низкочастотного фильтра выбирается последняя из них, разностная. Затем сигнал посылается в петлю слежения за фазой, где местный генератор непрерывно корректируется таким образом, чтобы точно следовать за изменениями в фазе несущей, когда изменяется расстояние между приемником и спутником. Получается наблюдение накопленной фазы биений несущей путем простого подсчета всех прошедших циклов (посредством подсчета «переходов через ноль» волны биений) и измерения дробной фазы захваченного сигнала местного генератора.
Описанный здесь метод использует корреляцию по кодам, он обеспечивает все компоненты сигнала спутника: отсчет по часам спутника, навигационное сообщение и немодулированную несущую. Недостаток этого метода состоит в том, что необходимо
знать псевдослучайные коды. Однако в случае шифрования P кода (режим Anti-Spoofing) эта возможность отсутствует. Тогда используются бескодовые или полубескодовые методы.
Метод, в котором не используются коды, принесенные сигналом спутника, называется бескодовым слежением или квадратированием сигнала. Он не использует измерение псевдодальностей и полагается исключительно на наблюдения фазы несущей. Как и другие методы, он также зависит от создания промежуточной частоты (частоты биений). При квадратировании сигнала частота биений создается посредством умножения входящего сигнала на самого себя. В результате получается удвоенная частота, то есть длина волны уменьшается вдвое по сравнению с исходной. Другими недостатками этого метода является то, что в процессе квадратирования несущей с нее удаляются все коды, в том числе и навигационное сообщение, а также ухудшается отношения сигнал-шум, потому что при квадратировании несущей шум фона также квадратируется. Поэтому этот метод должен получать информацию, такую как альманах и поправки часов из других источников.
Но квадратирование сигналов имеет также и положительные качества. Оно уменьшает влияние многопутности. Оно не зависит от PRN кодов и ему не мешает шифрование P кода. Этот метод работает и на L2, и на L1, и эта облегчает двухчастотную ионосферную коррекцию. Поэтому квадратирование сигналов может обеспечивать высокую точность даже на длинных базовых линиях.
Метод кросс корреляции является также бескодовым. Он основан на том, что неизвестный Y-код идентичен на обеих несущих, что дает возможность проводить кросс корреляцию сигналов L1 и L2. Из-за того, что скорость распространения ради волны в атмосфере зависит от частоты, Y-код на L2 идет несколько медленнее, чем на L1. Временная задержка, необходимая для того, чтобы в приемнике сигналы L1 совпали с сигналами L2, равна разности во времени прохождения пути двумя сигналами. Задержка сигнала L2 изменяется и должна соответственно корректироваться, чтобы достигался максимум корреляции между сигналами L1 и L2. Полученные из процесса корреляции наблюдения представляют разности расстояний между двумя сигналами, полученными из временной задержки Y-кода на двух несущих, то есть PL2,Y PL1,Y , а разность фаз
L2 L1 получается по несущей частоты биений.
Выходы кросс корреляции можно использовать для вывода кодовой псевдодальности на L2 и фазы, образуя
PL2 PL1,C / A (PL2,Y PL1,Y ) |
(3) |
и |
|
L2 L1,C / A ( L2 L1 ) , |
(4) |
где нижние индексы в кодовых дальностях PL1,C / A и фазах L1,C / A показывают, что они
получены через измерения С/А-кода сигнала L1.
Корреляция по кодам с методом квадратирования является улучшенным методом квадратирования. Он включает корреляцию принятого Y кода сигнала L2 с локально созданной копией P кода. Эта корреляция возможна потому, что Y код происходит из сложения по модулю два P кода и W кода (кода шифрования). Поскольку тактовая частота W кода почти в 20 раз меньше частоты Y кода, то всегда существуют участки Y кода, которые идентичны соответствующим участкам исходного P кода. Поэтому копия P кода смещается таким образом, чтобы совместить участки Р кода с участками Y кода сигнала от спутника. После корреляции применяется низкочастотный фильтр посредством сужения полосы пропускания, а затем сигнал квадратируется, чтобы избавиться от кода. Этот метод обеспечивает кодовую дальность и фазу на половинной длине волны. Этот метод менее восприимчив к помехам, в нем меньше потери в SNR.
Метод Z-слежения – это улучшенный полубескодовый метод. В этом методе Y код на сигналах L1 и L2 раздельно коррелируется с созданной в приемнике копией P кода.

Поскольку корреляция производится раздельно, то W код получается на каждой частоте и затем удаляется из сигнала. Удаление кода шифрования приводит к таким же сигналам, что и без режима Anti-Spoofing. Таким образом, получаются кодовые дальности и фазы несущей на L1 и L2 с полной длиной волны. Заметим, что Y-кодовые псевдодальности имеют такую же точность, что и Р-кодовые псевдодальности.
Все методs восстановления несущей L2 при наличии режима Anti-Spoofing страдают от последующего ухудшения в отношении сигнал-шум. Без исключения, никакой бескодовый или полубескодовый метод не восстанавливают информацию сигналов GPS, как метод корреляции по кодам. Кроме того, чем слабее сигнал, тем он более чувствителен к ионосферной активности и помехам, которые могут вызывать потерю захвата.
Антенны. В ГНСС аппаратуре применяется несколько конструкций антенн, но сигналы спутников имеют настолько низкую плотность мощности, особенно после прохождения через атмосферу, что эффективность антенны очень важна. Антенны могут быть запроектированы для приема только частоты L1 или обеих частот L1 и L2, для одной системы, скажем GPS, или для нескольких систем. Антенна должна быть чувствительной к сигналам, имеющим правостороннюю круговую поляризацию.
Большинство изготовителей ГНСС приемников используют микрополосковую антенну (рис. 12). Она образована двумя проводниками 1 и 3, разделенными диэлектриком 2. Верхний проводник – излучатель антенны, нижний – заземленная плоскость, 4 - выходная линия передачи. Микрополосковая антенна может принимать в двух диапазонах частот. Такая антенна прочна, компактная, имеет малую массу и размеры, простую конструкцию и низкий профиль.
а б Рис. 12. Схема устройства микрополосковой антенны (а) и ее внешний вид (б).
Полосковый проводник располагается над металлической заземленной плоскостью на месте, соответствующем точке возбуждения круговой поляризации. Размеры излучателя подбираются близкими к половине длины волны. Две металлические пластины, полосковый проводник и заземленная плоскость, образуют резонатор электромагнитных колебаний, которые излучаются в верхнюю полусферу над излучателем.