

Контрольная №4. Определение положения центра тяжести плоской фигуры

|
Исходные параметры фигуры | |||||
|
|
(cм)
|
(cм)
|
(cм)
|
(cм)
|
(cм)
|
|
0 |
8 |
5 |
4 |
5 |
4 |
|
1 |
10 |
6 |
5 |
6 |
4 |
|
2 |
12 |
7 |
6 |
7 |
5 |
|
3 |
14 |
8 |
7 |
8 |
5 |
|
4 |
16 |
9 |
8 |
|
5 |
|
5 |
9 |
|
5 |
|
4 |
|
6 |
10 |
|
6 |
|
4 |
|
7 |
11 |
|
6 |
|
4 |
|
8 |
12 |
|
6 |
|
4 |
|
9 |
13 |
|
7 |
|
5 |
|
|
|
|
|
|
|
|
Исходные данные и геометрические характеристики фигуры | |||||||||||
|
№ гр. |
шифр |
(cм)
|
(cм)
|
(cм)
|
(cм)
|
(cм)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. Общие положения основ теории статики
6.1. Связи и их реакции, нагрузки
Свободаматериальной точки, твердого тела или системы тел – это их возможность перемещаться в пространстве.Степенью свободы (координатами) какой-либо материальной точки, твердого тела или системы тел называют количество независимых геометрических параметров, однозначно определяющих положение этих объектов в рассматриваемом пространстве.
Свобода тела может быть ограничена каким-либо препятствием в виде других тел (связей). Степень свободы тела при этом уменьшается. Всякое препятствие (устройство), устраняющее одну степень свободы, рассматривают как одну кинематическую связь. Твердое тело, движение которого не ограничено связями, называют свободным.
Образование механических систем из совокупности тел осуществляется с помощью связей. Силы, с которыми связи действуют на соединяемые ими тела, называют реакциями связей. Связи, препятствующие перемещению тела относительно земли, называютопорными,как и соответствующие им реакции. Направлена реакция опоры в сторону, противоположную той, куда она не дает перемещаться телу. Прочие внешние по отношению к механической системе силы, не являющиеся реакциями связей, называютактивными.
Каждая связь имеет как кинематическую, так и статическую (силовую) характеристику. Кинематическая характеристика определяет, каким движениям одного тела относительно другого препятствует соединяющая их связь и сколько степеней свободы совокупности этих тел она уничтожает, астатическая характеристикасвязи – какие реакции в ней могут возникнуть.
Чтобы сообщить телу виртуальное
перемещение, не нужно ни дополнительных
сил, ни времени, так как виртуальные
перемещения являются воображаемыми.![]()
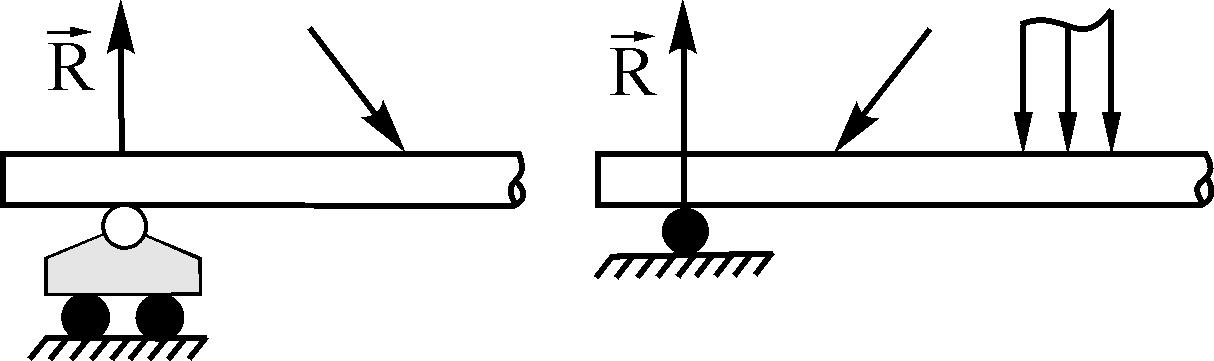
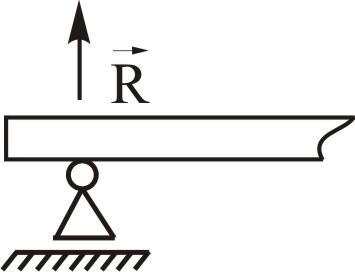
Рассмотрим кратко основные виды идеальных, наиболее часто встречающихся в практике, связей.
1
Рис.1.8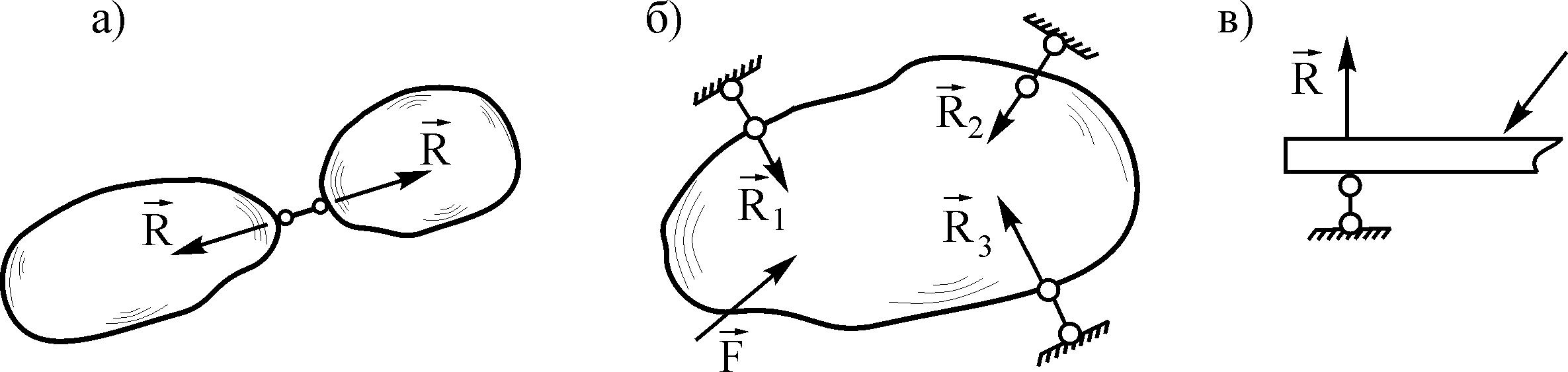

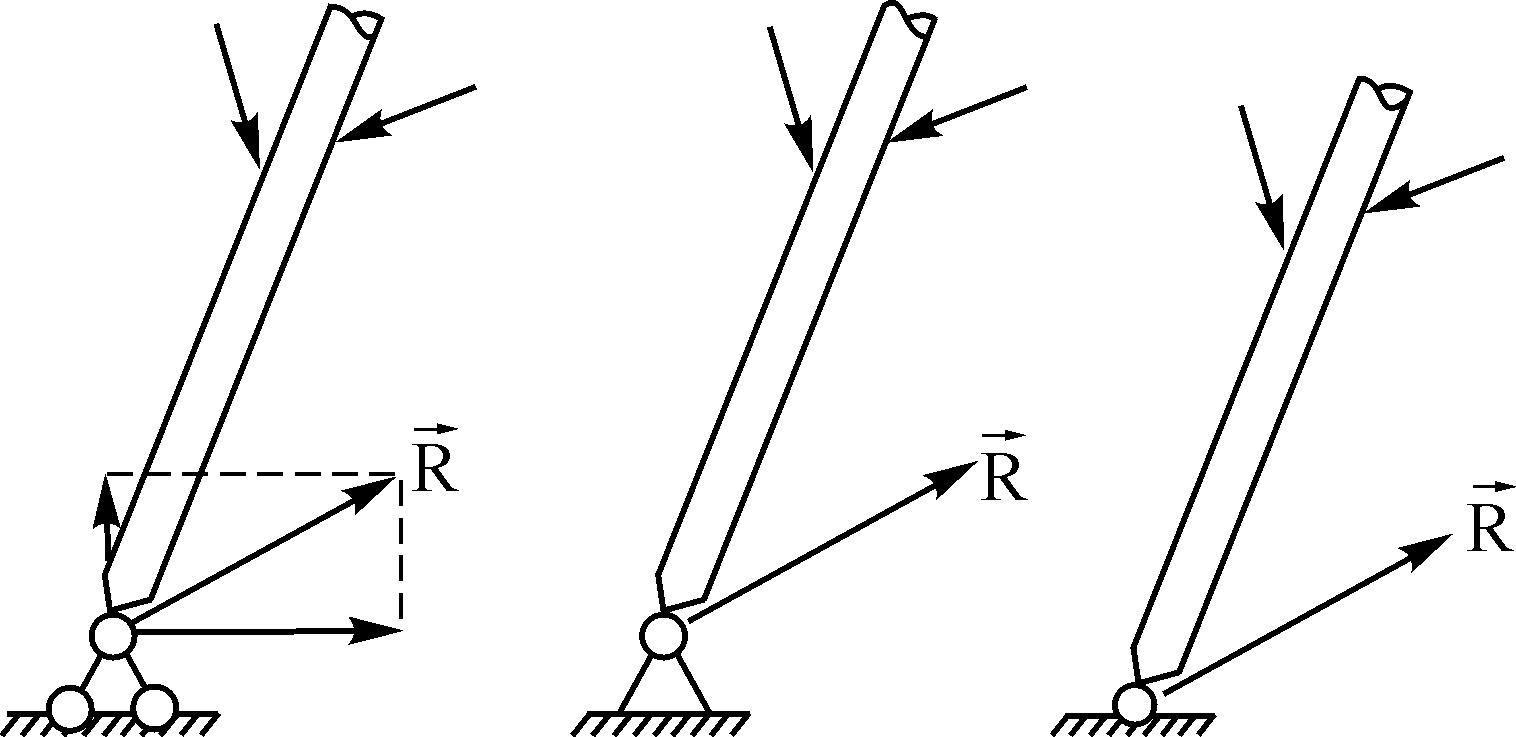
![]() – произвольно направленный вектор,
который эквивалентен двум независимым
(непараллельным силам) (
– произвольно направленный вектор,
который эквивалентен двум независимым
(непараллельным силам) (![]() ).
).
Если одно из соединяемых шарниром тел является землей, то шарнир трактуют как шарнирно-неподвижную опору. В расчетных схемах шарнирно-неподвижную опору изображают различными способами.
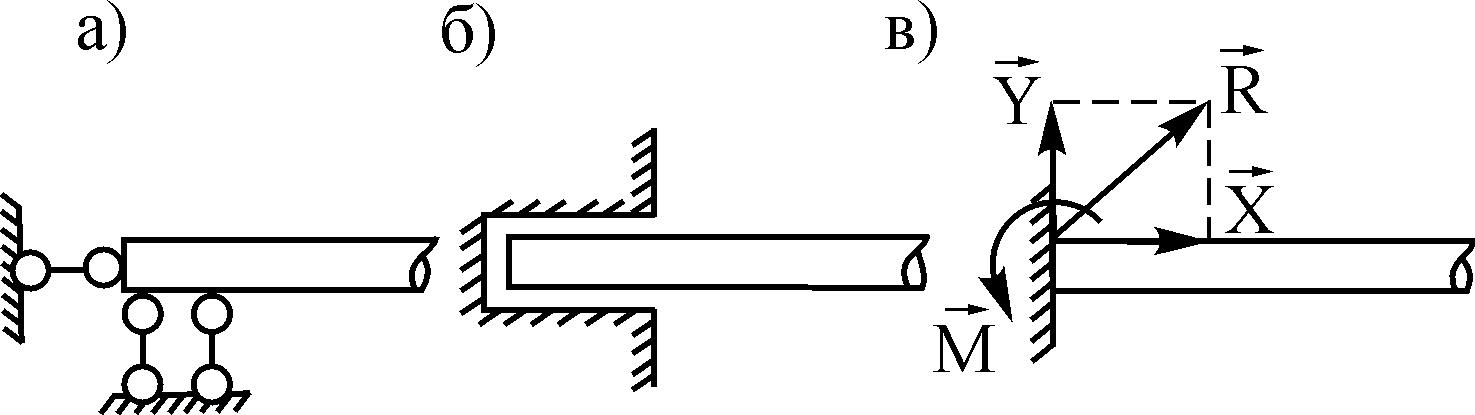
![]()
![]() и опорный момент М.
и опорный момент М.

4. Скользящая заделка:
Одним из основных положений теоретической механики является принцип освобождаемости от связей или аксиома связей:любое тело можно рассматривать как свободное, если заменить действие связей их реакциями.
Схема, на которой твердое тело полностью освобождено от связей, реакции которых вместе с активными силами, действующими на него, представлены векторами, называется силовой схемой тела. Построение силовой схемы – первый шаг в решении любой задачи статики – задачи об условиях равновесия тела или системы тел.
Различают внешние и внутренние силы. Внешние– это силы, действующие на частицы данного тела и являющиеся результатом взаимодействия с другими телами, то есть источник их обусловлен наличием других материальных объектов.Внутренниминазывают силы взаимодействия частиц тела.
По способу приложения внешние силы могут быть распределенными по поверхности тела (размерность Па = Н/м2), по линии контакта двух тел (Н/м).Сосредоточеннойназывают силу(Н),эквивалентную нагрузке, распределенной по малой площади поверхности тела. Объемные– это силы, действующие на каждую из частиц тела или каждый из элементов его объема (Н/м3). К таковым можно отнести, например, силу тяжести и силы инерции.