

4.4. Микропроцессорные системы управления
Общие сведения о микропроцессорах и микропроцессорных устройствах
Появление в 70-х годах прошлого столетия первого микропроцессора положило начало разработке нового поколения систем управления. Микропроцессор это устройство, осуществляющее обработку цифровой информации, управляющее этим процессом и выполненное в виде одной или нескольких интегральных схем. Наряду с традиционными вычислительными системами они применяются в различных схемах управления. Процессор состоит из арифметическо - логического устройства (АЛУ) и устройства управления (УУ) действиями над числами, которое реализует АЛУ[9]. В современных микропроцессорах, реализованных на интегральных микросхемах (ИМС), используется двоичная арифметика, в которой число представляется как сумма степеней числа 2, умноженных на соответствующее число.
Упрощенная структурная схема микропроцессорного устройства (МПУ) приведена на рис. 4.8. Оно содержит микропроцессор, запоминающее устройство (ЗУ), или память, и устройство ввода-вывода (УВВ).
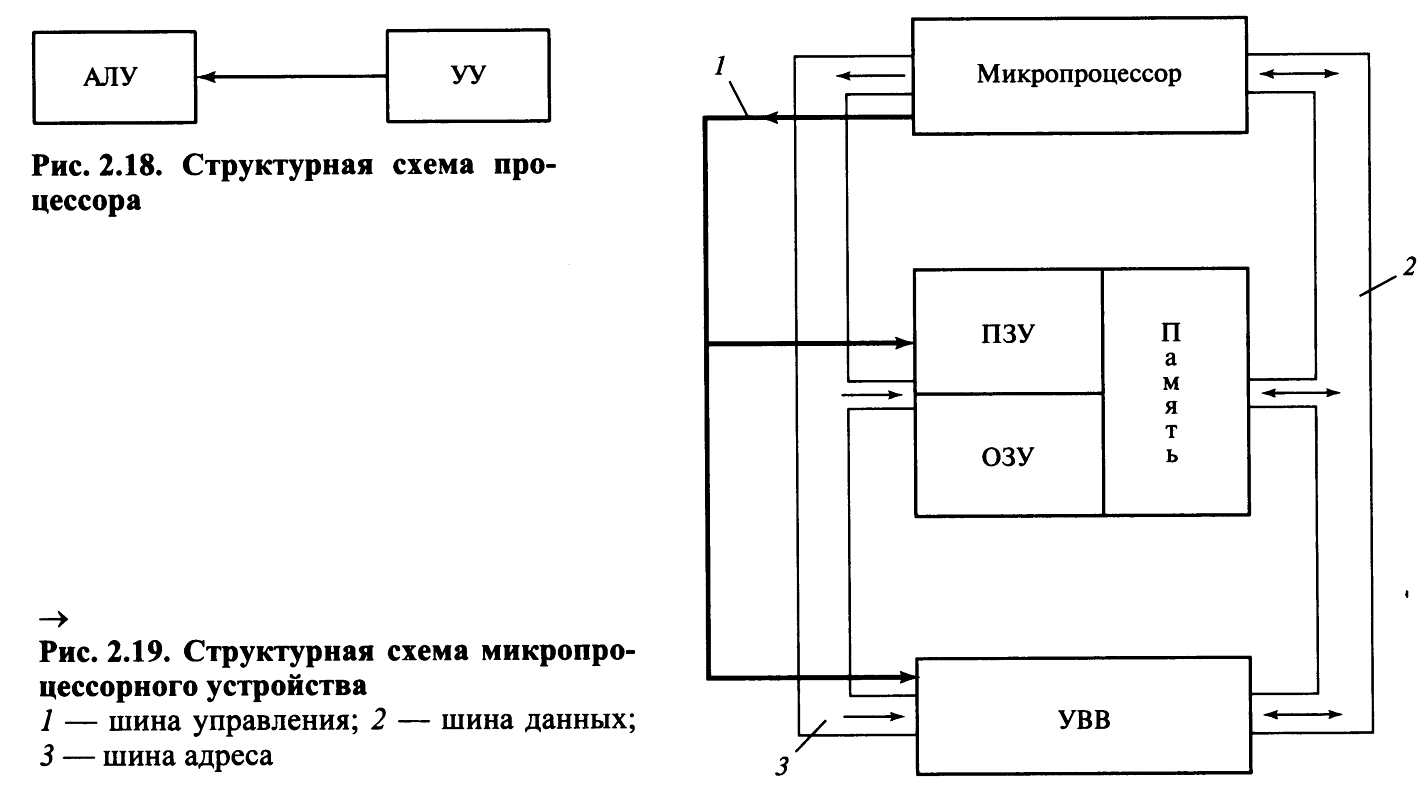
Рис. 4.8. Структурная схема микропроцессорного устройства
Процессор выполняет все действия в соответствии с алгоритмом работы. В ЗУ хранятся команды программы функционирования процессора.
Основные характеристики МПУ. Важной характеристикой МПУ является его разрядность, т. е. максимальная длина двоичною кода, который может передаваться и обрабатываться целиком. Разрядность устройства определяется разрядностью его микропроцессора. Операции, выполняемые МПУ, синхронизируются с импульсами прямоугольной формы синхроимпульсами, вырабатываемыми внешним тактовым генератором. Это позволяет обеспечить согласование скоростей работы различных узлов. При этом любая операция не может быть выполнена быстрее, чем за один период синхроимпульсов. Тактовая частота синхроимпульсов генератора определяет максимальное время выполнения переключения элементов в МПУ. Быстродействие процессора характеризуется количеством миллионов выполненных команд в секунду — МIРS (million instructions per second). Количество тактов внешнего генератора, приходящихся на время выполнения команды, для разнотипных процессоров различно. Вследствие этого число исполненных команд за единицу времени, а значит, и значение МIРS для процессоров в некоторых случаях невозможно определить точно. Поэтому эта величина чаще всего используется при сравнении процессоров одного семейства. Одной из основных характеристик МПУ являются тип ЗУ и объем имеющейся памяти. Оперативные запоминающие устройства подразделяются по способу хранения информации на статические и динамические. В статических ОЗУ хранение памяти обычно осуществляют бистабильные устройства — триггеры, способные при наличии источника питания сохранять неизменное состояние, а следовательно, и записанную информацию неограниченное время. В динамических ОЗУ функцию элементов памяти выполняют электрические конденсаторы, которые для сохранения записанной информации нуждаются в периодической перезаписи (регенерации). Оба типа ОЗУ являются энергозависимыми, и при выключении источника питания записанная в них информация исчезает.
Постоянные запоминающие устройства сохраняют информацию при отключении питания. Они подразделяются на программируемые при изготовлении (масочные) ПЗУ, программируемые пользователем (ПИЗУ) и перепрограммируемые (репрограммируемые) (РПП ЗУ). РППЗУ позволяют многократно переписать записанную информацию.
Микропроцессорные контроллеры. Широкое использование микропроцессорной техники в системах управления привело к появлению специализированных МПУ — микроконтроллеров (МК). Микропроцессорный контроллер — это вычислительно-управляющее устройство, предназначенное для выполнения функций контроля и управления различными техническими объектами и сочетающее в себе микропроцессорное ядро и набор встроенных устройств ввода-вывода.
В зависимости от условий применения микроконтроллеры могут иметь различное конструктивное исполнение и быть размещены на одной или нескольких платах. Наиболее универсальными являются многоплатные микроконтроллеры. В своем составе они имеют платы с микропроцессором и памятью, а также отдельные платы вспомогательных узлов со слаботочными элементами.
С развитием микросхемотехники многие микросхемы стали представлять собой законченные функциональные блоки [цифроаналоговые преобразователи (ЦАП), аналого-цифровые преобразователи (АЦП), счетчики и т.п.]. Оказалось возможным разместить на одной плате микропроцессор, память, необходимые преобразователи и их интерфейсы и получить одноплатный микроконтроллер. Одноплатный микроконтроллер по сравнению с многоплатным, с тем же набором функций, обладает рядом преимуществ: меньше по размерам, проще в изготовлении, надежнее и дешевле [9]. Разные микросхемы имеют различные размеры, расположение и назначение выводов. Поэтому на печатную плату микроконтроллера можно установить только ту микросхему, под которую она выполнена. В настоящее время разрабатывают платы, обеспечивающие управление всеми типичными для данной области техники объектами (рис. 4.9).
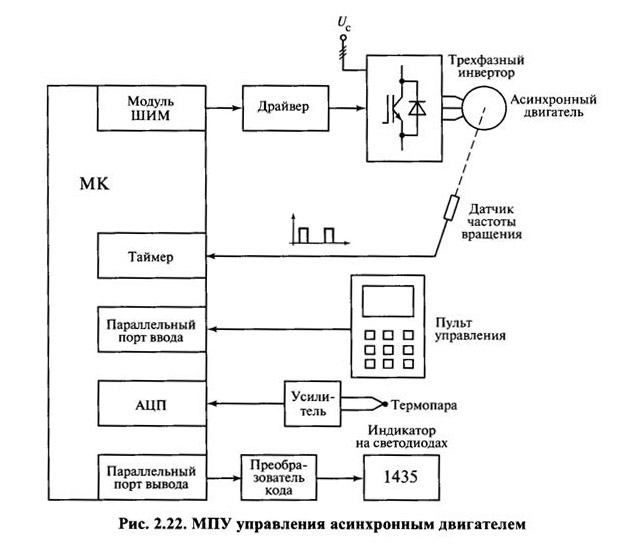
Рис. 4.9. МПУ управления асинхронным двигателем
Большое значение для функциональных возможностей микроконтроллеров имеет УВВ, осуществляющее обмен информацией между микроконтроллером и управляемыми элементами силового электронного устройства. Устройства ввода- вывода обеспечивают также преобразование информации, например преобразование аналоговых сигналов в цифровые и т. п. Для реализации этих функций УВВ включают в себя генераторы и счетчики импульсов, модули широтно-импульсной модуляции (ШИМ), аналого-цифровых преобразователей и другие устройства преобразования и обработки сигналов, несущих различную информацию, как о результатах работы микропроцессора, так и о параметрах силовой части управляемого устройства и её составных частей. Для решения частных задач с большим объемом вычислений созданы специализированные микроконтроллеры, адаптированные к решению задач цифрового управления в реальном времени. Таким образом, в современной силовой электронике микроконтроллеры используются в первую очередь для управления полупроводниковыми устройствами за счет встроенных специализированных устройств. Кроме того, они выполняют функции цифрового регулятора, системы защиты и диагностики, а также системы связи с технологической сетью высшего уровня. Регулирование частоты вращения двигателя осуществляется путем изменения напряжения и частоты трехфазного инвертора. Сигналы управления ключами инвертора формируются модулем ШИМ микроконтроллера и поступают на драйвер силовых транзисторов инвертора. Обратная связь по частоте вращения двигателя осуществляется с помощью датчика частоты вращения, дающего на своем выходе последовательность импульсов, частота которых пропорциональна скорости вращения вала двигателя. Таймер осуществляет счет этих импульсов, что позволяет рассчитывать период вращения двигателя. Внешнее управление осуществляется с помощью пульта. Для контроля теплового режима работы двигатель снабжен термопарой, сигнал с которой, поступает на АЦП микроконтроллера. Для индикации режимов работы обычно применяется цифровой светодиодный индикатор.
Вопросы для самоконтроля
1. Какие основные блоки содержит микропроцессорное устройство?
2. Чем различаются архитектуры микропроцессоров?
3. Какие характеристики определяют быстродействие МПУ?
4. Чем МПУ отличается от микропроцессорных контроллеров?
5. Дайте краткую сравнительную характеристику принципов регулирования по отклонению и по возмущению.
6. В синхронной системе с вертикально-фазовым управлением (см. рис. 4.6) угол управления равен α/6. Как изменится величина этого угла, если амплитуда напряжения Uт2 увеличится в 1,2 раза при неизменной частоте генератора?
7. Начертите структурную схему одноканальной системы управления тиристорами.
8. Какие преимущества имеют СУ импульсных преобразователей с управлением по току?
.