

10. Преобразователи частоты
Преобразователи частоты — это устройства, преобразующие переменный ток одной частоты в переменный ток другой частоты.
Различают два класса преобразователей частоты: с непосредственной связью; с промежуточным звеном постоянного тока.
Последние подразделяются на:
а) со звеном постоянного тока;
б) со звеном постоянного напряжения;
в) резонансные.
По количеству фаз выпускают:
а) однофазные;
б) трёхфазные.
По способу управления ключами схем применяют:
а) векторное;
б) скалярное;
в) с модуляцией по частоте;
г) с модуляцией по фазе или периоду.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
По величине питающего напряжения выпускают низковольтные и высоковольтные преобразователи [11].
В высоковольтных используются следующие схемные решения:
1) двухтрансформаторная схема преобразователя частоты;
2) схема преобразователя с последовательным включением ключей;
3) схема преобразователя с многообмоточным трансформатором.
10.1. Преобразователь с непосредственной связью
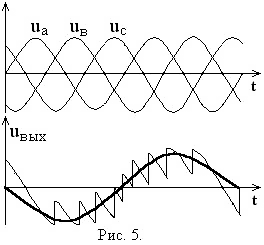
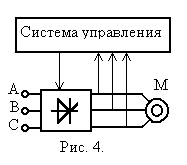
Исторически первый преобразователь - это преобразователь с непосредственной связью (рис.10.1). . В настоящее время преобразователи с непосредственной связью практически не находят применения из-за узкого диапазона вторичных частот. Преобразователь представляет управляемый выпрямитель на тиристорах, в котором в силовой части система управления поочерёдно подключает статорные обмотки к питающей сети.
Таким
образом, выходное напряжение преобразователя
формируется из «вырезанных» участков
синусоид входного напряжения.
На рис.10.1,б.
показан пример формирования выходного
напряжения для одной из фаз нагрузки.
На входе преобразователя действует
трехфазное синусоидальное напряжение
uа,
uв,
uс.
Выходное напряжение uвых
имеет несинусоидальную «пилообразную»
форму, которую условно можно аппроксимировать
синусоидой.
а б
Рис.10.1. Схема преобразователя с непосредственной связью
Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие - малый диапазон управления частоты вращения двигателя (не более 1: 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
10.2. Преобразователи с промежуточным звеном
Такие преобразователи подразделяются на преобразователи частоты с непосредственной связью и естественной коммутацией тока тиристоров и с непосредственной связью с искусственной коммутацией тока тиристоров. Преобразователи с промежуточным звеном постоянного тока позволяют регулировать выходную частоту при помощи системы управления инвертора СУИ в широком диапазоне как вверх, так и вниз от частоты питающей сети. Данный тип преобразователей частоты имеет простую схему силовой части, а следовательно, и системы управления.
В
синхронном электрическом двигателе
частота вращения ротора
![]() в
установившемся режиме равна частоте
вращения магнитного поля статора
в
установившемся режиме равна частоте
вращения магнитного поля статора
![]() . В
асинхронном электрическом двигателе
частота вращения ротора
. В
асинхронном электрическом двигателе
частота вращения ротора
![]() отличается от частоты вращения
отличается от частоты вращения
![]() на
величину скольжения
на
величину скольжения
![]() .
.
Частота
вращения магнитного поля
![]() зависит от частоты напряжения питания.
При питании обмотки статора электрического
двигателя трехфазным напряжением с
частотой
зависит от частоты напряжения питания.
При питании обмотки статора электрического
двигателя трехфазным напряжением с
частотой
![]() создается
вращающееся магнитное поле. Скорость
вращения этого поля определяется по
известной
формуле
ω1 =
создается
вращающееся магнитное поле. Скорость
вращения этого поля определяется по
известной
формуле
ω1 =
![]() ,
(10.1)
,
(10.1)
где р – число пар полюсов статора.
Переход
от скорости вращения поля ω1
,
измеряемой в радианах, к частоте вращения
![]() ,
выраженной в оборотах в минуту,
осуществляется по следующей формуле:
,
выраженной в оборотах в минуту,
осуществляется по следующей формуле:
![]() =
60ω1/
2π, (10.2)
=
60ω1/
2π, (10.2)
где 60 – коэффициент пересчета размерности.
Подставив
в это уравнение скорость вращения поля
ω1,
получим,
что
![]() =
=
![]() .
(10.3)
.
(10.3)
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питающей сети.
На этой зависимости и основан метод частотного регулирования.
Изменяя
с помощью преобразователя частоту
![]() на входе двигателя, мы регулируем частоту
вращения ротора.
на входе двигателя, мы регулируем частоту
вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя КПД, коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживаются постоянным отношением максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя. Максимальный момент, развиваемый двигателем, определяется следующей зависимостью между напряжением и частотой:
М
мах
=
![]() ,
(10.4)
,
(10.4)
где
![]() - постоянный коэффициент.
- постоянный коэффициент.
При постоянстве перегрузочной способности номинальные коэффициент мощности и КПД двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Но на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей. Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды ещё и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление». Для управления вектором тока, а следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты. Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна. Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
Структурная схема преобразователи частоты с промежуточным звеном постоянного тока показана на рис. 10.2. Напряжение сети выпрямляется управляемым выпрямителем 1, имеющим систему управления СУВ, фильтруется LC-фильтром 2 и подается на автономный инвертор АИ-3. Функции регулирования частоты выходного напряжения осуществляет инвертор, а напряжения – выпрямитель. Иногда обе функции совмещает инвертор, а выпрямитель выполняют неуправляемым. Основным недостатком преобразователя частоты с промежуточным звеном постоянного тока является двойное преобразование энергии – выпрямление и инвертирование, что приводит к снижению КПД и ухудшению массогабаритных показателей. В преобразователях частоты с промежуточным звеном постоянного тока можно осуществить свободный обмен электрической энергией между потребителем и питающей сетью в обоих направлениях. Для такого обмена требуются полностью управляемые вентили с двухсторонней проводимостью.
Промышленность выпускает IGBT транзисторы и силовые полевые транзисторы на токи до 60 А и напряжение до 1200 В. Они имеют более высокий КПД (до 98 %) по отношению к преобразователям на IGBT транзисторах.
Преобразователи частоты с промежуточным звеном постоянного тока применяют для питания электрических двигателей, частоту вращения ротора которых необходимо варьировать в широких пределах при пуске, торможении и регулировании скорости.
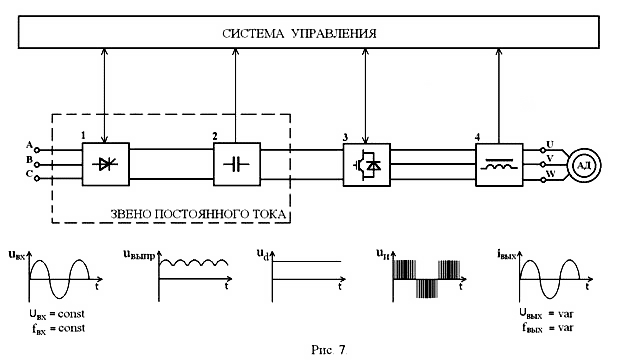
Рис. 10.2. Преобразователь частоты с промежуточным звеном постоянного тока
В соответствии с современным направлением развития науки и техники преобразователи частоты строят на регулируемых выпрямителях и инверторах управляемых однокристальной микро ЭВМ (рис.10.3).
Для силовой части преобразователя используют тиристоры и мощные полевые и IGBT-транзисторы. Инвертор преобразователя частоты на тиристорах имеет большую стоимость, вес, габариты, более сложный монтаж, конструкцию и меньшую надежность. Транзисторный преобразователь частоты основан на широтно-импульсной модуляции. Для управления преобразователем, питающем трехфазный двигатель, используется контроллер, имеющий 6 выходов ШИМ: по два на каждую фазу – один для верхней полуволны, другой для нижней. Также микроконтроллер должен обеспечивать возможность введения обратных связей, а значит, иметь АЦП, цифровые вводы–выводы для создания программных клавиш, возможность программирования и перепрограммирования с персональной ЭВМ. В схеме встроены цепи защиты, которые предохраняют силовые устройства от повреждений в случае системного сбоя или перенапряжения. Эти цепи обнаруживают неисправность и производят отключение схемы. Защита предусмотрена в следующем объеме: защита от тока короткого замыкания; минимальная защита по управляющему напряжению; температурная защита.
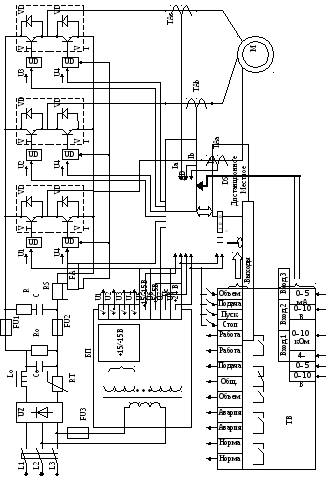
Рис. 10.3. Схема транзисторного преобразователя частоты с цифровым управлением
Также у силового драйвера предусмотрен выходной сигнал ошибки
FAULT, чтобы предупреждать контроллер о срабатывании какой-либо защиты. В случае срабатывания цепи защиты на выходе драйвера формируется сигнал FAULT и контроллер прекращает ШИМ модуляцию. Для согласования уровней напряжения на выходах контроллера и входах силовых транзисторов предусмотрена гальваническая развязка на диодно-транзисторных оптронах АОТ.
Три АОТ, управляющие нижними транзисторами JGBT, питаются от общего выпрямителя + 15 В, а три верхних АОТ, управляющие верхними тремя IGBT c плавающим потенциалом управления, питаются от трех изолированных выпрямителей + 15 В. Для исключения этих выпрямителей используются бустреповые емкости С1 С2, заряжаемые через диодно-резисторные цепочки от выпрямителя + 15 В питающего. Для согласования уровней напряжений на выходе МЭВМ и входах силовых транзисторов предусмотрена гальваническая развязка на диодно-транзисторных оптронах АОТ. Три АОТ, управляющие нижними IGBT,нижние АОТ. Величина резистора датчика тока, включенного в цепь N-N1, выбирается в зависимости от мощности электродвигателя М, а интегрирующее звено R1-C5 исключает ложные срабатывания защиты в моменты коммутации ключей. Если сигнал с шунта превысит 0,6 В, то все ключи закрываются и выдается сигнал ошибки FAULT на ОЭВМ. На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных преобразователей, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных единичных модулей с меньшим рабочим напряжением. Количество модулей определяется величиной рабочего напрясжения и током нагрузки. 10.3. Высоковольтные преобразователи частоты
В последние годы большое внимание, которое диктуется потребностями рынка, уделяют разработке и созданию высоковольтных частотных преобразователей. Требуемая величина выходного напряжения преобразователя частоты для высоковольтного электропривода достигает 10 кВ и выше при мощности до нескольких десятков мегаватт. Вентильные высоковольтные преобразователи частоты предназначены для частотного пуска и регулирования скорости вращения высоковольтных электродвигателей, мощностью 250-5000 кВт. Они преобразуют электрическую энергию трехфазной сети переменного тока промышленной частоты напряжением 3, 6 или 10 кВ в трехфазное напряжение с параметрами частоты и напряжения, изменяемыми по закону частотного регулирования. Существует четыре основные схемы построения вентильных преобразователя со звеном постоянного тока:
-- прямого преобразования ПЧСВ;
-- с низковольтным звеном ПЧСН;
-- многоуровневые;
-- каскадные.
Электропривод прямого преобразования ПЧСВ находит применение, если напряжение питающей сети и номинальное напряжение двигателя соответствуют напряжению преобразователя частоты. Функциональная схема такого электропривода показана на рис.10.4.
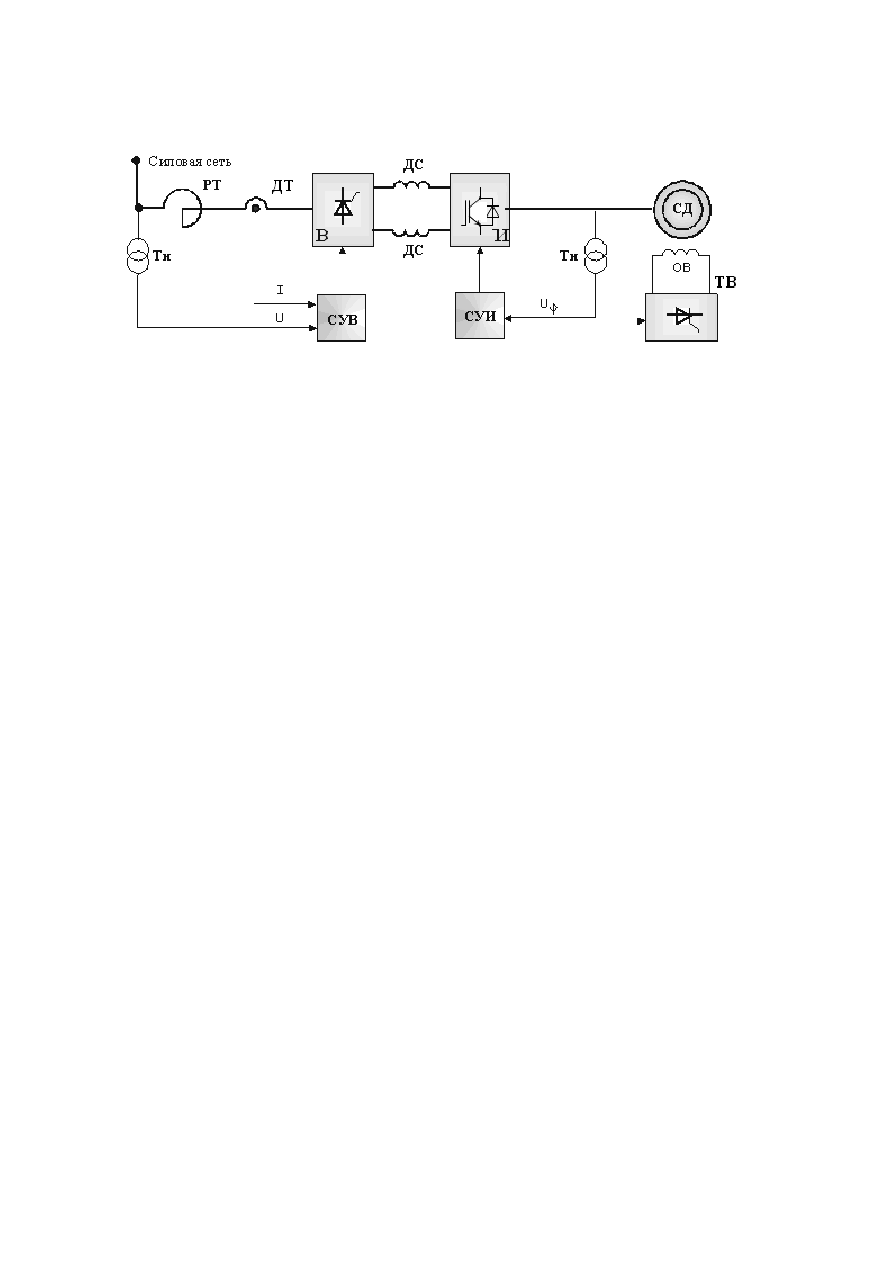
Рис. 10.4. Электропривод прямого преобразования ПЧСВ: В - управляемый выпрямитель; РТ - входной реактор; ДТ - датчик тока: ДС - сглаживающие дроссели; И - инвертор; СУВ - система управления выпрямителем; СУИ - система управления инвертором; Тн - измерительные трансформаторы напряжения; ТВ - тиристорный возбудитель; ОВ - обмотка возбуждения синхронного двигателя
ПЧСВ включает в себя высоковольтный выпрямитель, инвертор и сглаживающий дроссель в цепи постоянного тока. Нагрузкой инвертора является приводной двигатель. Для симметрирования силовой схемы преобразователя сглаживающие дроссели выполняются с расщепленной обмоткой (с двумя полуобмотками). Обмотки дросселя включаются последовательно в оба полюса звена постоянного тока. Возможно применение двух независимых дросселей. Такое построение позволяет снизить воздействие на изоляцию двигателя по отношению к земле. Входной реактор (РТ) предназначен для ограничения аварийных токов короткого замыкания на безопасном для силовых приборов уровне.
Силовые схемы управляемого выпрямителя и инвертора построены на базе трехфазных мостов. Каждое из шести вентильных плеч выпрямителя (инвертора) составлено из n последовательно включенных вентилей (тиристоров и IGBT-транзисторов). Число вентилей зависит от класса питающего напряжения. Силовые вентили, характеризующиеся разбросом заряда восстановления, шунтируются цепями динамического распределения напряжения по последовательно включенным вентилям при коммутации. Параметры цепей распределения выбраны с учетом максимальной величины разброса заряда восстановления при максимальной нагрузке, а также с учетом параметров нелинейного токоограничивающего дросселя, включенного в каждую вентильную цепь. Для повышения надежности и исключения развития аварии осуществляется контроль целостности индивидуально каждого силового вентиля.