

Цель работы: Освоить метод идентификации объекта по его частотным характеристикам.
Получение модели по частотным характеристикам
Моделирование с помощью активного эксперимента выполняется обычно вне контура регулирования. Наиболее распространены активные воздействия в виде синусоидальных сигналов, а также в виде ступенчатых и импульсных воздействий.
Пусть на частотах i, i=1..N выполняется снятие частотных характеристик.
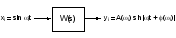
Рис. 1. Схема снятия частотных характеристик
По 2N результатам эксперимента
A(i) = Ai; (i) = i
вычислим значения вещественной и мнимой частотных характеристик
Ri =Ai cos i; Ii = Ai sin i.
Будем искать передаточную функцию в виде
Соответствующее
описание системы в виде дифференциального
уравнения:

Пусть для краткости положим n = 3 и m = 2, тогда для каждого i-го опыта
y = Ai sin(it + i); x = sin it;
dy/dt = i Ai cos(it + i); dx/dt = i cos it;
d2y/dt2 = i2 Ai sin(it + i); d2x/dt2 = i2 sin it;
d3y/dt3 = i3 Ai cos(it + i).
После подстановки этих выражений для установившегося синусоидального режима в дифференциальное уравнение получим тождество, справедливое на данной частоте i для любого момента времени t:
Ai sin(it + i) + B1 i Ai cos(it + i) B2 i2 Ai sin(it + i)
B3 i3 Ai cos(it + i) = A0 sin it + A1 i cos it A2 i2 sin it
Учтем преобразования:
Ai sin(it + i) = Ai (sin it cos i + cos it sin i) = Ri sin it + Ii cos it
Ai cos(it + i) = Ai (cos it cos i sin it sin i) = Ri cos it Ii sin it
Поскольку тождество имеет место для любого момента времени t, то выберем некоторый момент t* из условия:
it* = /4, т.е. t* = /(4i),
тогда sin it* = cos it* и тождество можно записать как
Ri + Ii + B1 i (Ri Ii) B2 i2 (Ri + Ii) B3 i3 (Ri Ii) = A0 + A1 i A2,
или, собирая неизвестные в левой части:
A0 + A1 i A2 B1 i (Ri Ii) + B2 i2 (Ri + Ii) + B3 i3 (Ri Ii) = Ri + Ii.
Если в полученную систему уравнений подставить экспериментальные значения Ri и Ii, то равенство для каждого i будет приближенным. Тогда систему уравнений можно решать МНК, введя невязку как разность между левой и правой частями. Введенная таким образом невязка будет линейна относительно искомых коэффициентов и вычисление их МНК даст несмещенные оценки.
Точность вполне удовлетворительная (различие в коэффициентах обусловлено лишь погрешностями округления).
Метод наименьших квадратов в многомерном случае
Будем рассматривать здесь многомерную модель как модель со многими входами и одним выходом:

Рис. 2. Многомерная система
Сигналы на входах и выходах считаем центрированными, т.е.
M[xj(t)] = 0, j = 1, 2, ..., k; M[y(t)] = 0.
Модель ищем в виде линейной комбинации входных сигналов

Помеху считаем аддитивной

Выбираем N >> k моментов времени ti, i = 1, 2, ..., N и в каждый из этих моментов наблюдаем все входы и выход.
Интервал между ti не играет роли. Важно только, что в момент взятия отсчетов система должна быть в установившемся состоянии, т.е. интервал должен быть достаточным для практического окончания переходных процессов при изменении очередного состояния системы.
Введем обозначения:
xj(ti) = xij; y(ti) = yi; (ti) = i.
тогда

В матричной форме
Y = XB + E,
где
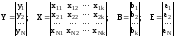
Откуда получаем т.н. нормальные уравнения МНК:
XTXB = XTY.
Решение нормальных уравнений
B = (XTX)-1 XTY
Порядок выполнения лабораторной работы.
-
С помощью метода частотных характеристик определить параметры модели вида
 ,
,
-
Проверить работу метода в тех случаях, когда порядок модели больше/меньше порядка объекта.
-
Сделать выводы.
Содержание отчета.
-
Цель работы.
-
Передаточная функция объекта.
-
Переходные и частотные характеристики объекта.
-
Основные расчетные соотношения.
-
Найденная модель.
-
Модели для случаев, когда порядок модели больше/меньше порядка объекта.
-
Выводы.