

2.ДИНАМИКА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ.
2.1. ЗАКОНЫ НЬЮТОНА. ОСНОВНАЯ ЗАДАЧА ДИНАМИКИ. ЦЕНТР МАСС. УРАВНЕНИЕ ДВИЖЕНИЯ ЦЕНТРА МАСС.
ПОСТУЛАТЫ КЛАССИЧЕСКОЙ МЕХАНИКИ (законы Ньютона)
Первый закон Ньютона (закон инерции) постулирует и содержит определение инерциальной системы отсчета (ИСО)
существуют такие системы отсчета, называемые инерциальными, относительно которых тело (МТ) движется прямолинейно и равномерно либо покоится, если отсутствуют какие бы то ни было воздействия на нее со стороны других материальных точек или тел.
Таким образом, т.н. свободная МТ либо покоится относительно ИСО, либо движется по инерции, и это движение
в ИСО – равномерное и прямолинейное.
Из определения ИСО следует, что любая СО, движущаяся
относительно некоторой ИСО поступательно, равномерно и прямолинейно, также является инерциальной системой отсчета.
При наличии воздействия на МТ скорость ее изменяется, она приобретает ускорение, которое зависит от инертности МТ, а также от направления и интенсивности воздействия.
Мерой инертности материальной точки (тела) является ее масса ( m). Воздействие на МТ со стороны другой механической системы (материальной точки, тела и т.д. ) определяется векторной величиной – силой .
Второй закон Ньютона гласит:
ускорение, приобретаемое материальной точкой массы под действием силы , сонаправлено с силой, а величина его прямо пропорциональна величине силы и обратно пропорциональна массе материальной точки:
|
F |
|
|
a b |
|
(2.1 а) |
|
m |
|||
|
|
где b=const – положительная постоянная, зависящая от выбора системы единиц.
В системе СИ b=1 и второй закон можно записать в форме
уравнения движения для МТ:
|
(2.1 б) |
ma F |
Если на материальную точку действуют не одна сила, а несколько
сил, то |
|
n |
|
|
ma Fk |
(2.1 в) |
|
k 1
Третий закон Ньютона описывает взаимодействие двух тел (МТ).
При взаимодействии двух тел (МТ) силы, которыми они действуют друг на друга, равны по величине и противоположны по направлению:
F1,2 F2,1 |
(2.2) |
где – F1,2 сила, действующая на тело 1 со стороны тела 2, а F2,1 – сила, действующая на тело 2 со стороны тела 1.

Основная задача динамики механической системы в простейшей
|
постановке формулируется так. |
|
Известны все силы Fi |
, действующие на все материальные точки |
|
|
системы, известны начальные положения и начальные скорости |
|
|
|
ri 0 |
|
всех материальных точек системы. Найти закон движения системы, |
|
|
i0 |
для каждой материальной точки, входящей в |
|
т.е. закон движения |
|
|
состав системы. |
ri ( t ) |
|
|
|
Пример. Пусть система состоит из одной материальной точки |
|||
массы |
. Известна |
|
m |
– сумма сил, действующих на нее. |
|||
|
F( t ) |
|
|
Заданы начальные значения радиуса-вектора и скорости |
|||
м.т. и |
|
r |
0 |
. Найдем закон движения материальной точки. |
|||
|
|
0 |
|
Ускорение определяем с помощью уравнения движения (второго закона Ньютона)
|
F( t ) |
(2.3) |
|
a( t ) |
|
||
m |
|||
|
|
а дальше пользуемся соотношениями кинематики (см. Лекцию №1, равенства (1.12), (1.11)), интегрируем (2.3) два раза по времени:
|
|
t |
|
|
|
|
|
|
F( t' ' ) |
|
|
||||
( t ) 0 |
|
m |
dt'' |
(2.4) |
|||
|
|
|
|
||||
0 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
t |
t' |
|
|
|
|
|
F( t'' ) |
||||||||||
r( t ) r |
|
( t' )dt' r |
t |
|
|
|
|
|
dt'' dt' (2.5) |
||
|
|
|
|
||||||||
|
0 |
|
|
0 |
0 |
|
m |
|
|||
|
|
|
0 |
|
|
0 |
|
|
|||
|
|
|
|
|
0 |
|
|
|
|
||
2.2.. СИЛЫ В МЕХАНИКЕ. УПРУГАЯ И КВАЗИУПРУГАЯ СИЛЫ. СУХОЕ И ВЯЗКОЕ ТРЕНИЕ.
СИЛА УПРУГОСТИ
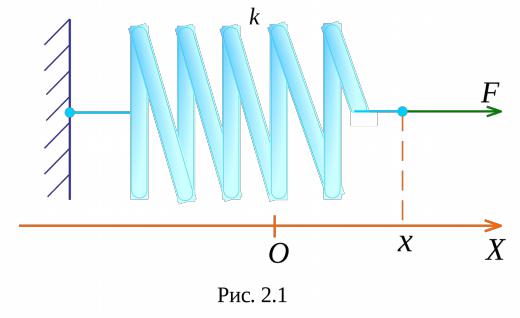
Рассмотрим легкую (невесомую) пружинку под действием силы F (рис. 2.1).
Ось OX направлена от закрепленного конца к свободному концу пружинки вдоль нее; начало О выбрано в точке, где находится свободный конец недеформированной пружинки.

Удлинение пружинки:
l l l0 |
(2.6) |
l0 – длина недеформированной пружинки.
Очевидно (см. рис. 2.1),
l x
(2.7) x – отклонение свободного конца от положения равновесия.
Если пружинка упругая, то величина ее удлинения прямо
пропорциональна величине деформирующей |
силыF |
: |
||||
|
|
|
|
l |
|
|
|
|
l |
|
1 F |
|
(2.8) |
|
|
|
|
|||
Где k |
|
|
|
k |
|
|
|
|
|
||||
– положительная постоянная, называемая |
|
|||||
коэффициентом упругости или коэффициентом
жесткости пружинки.
Уравнение (2.8) – закон Гука, описывающий упругую деформацию тела. PS. Деформация – это изменение формы и (или) размеров тела. Деформация называется упругой, если деформированное тело после снятия
нагрузки восстанавливает свою форму и размеры. В противном случае деформация называется пластической. Таким образом, упругая – это обратимая деформация, а пластическая – необратимая.
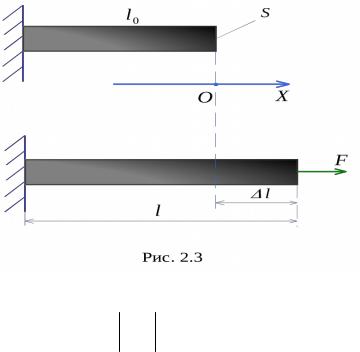
Рассмотрим вместо пружинки однородный стержень длиной l0 и площадью сечения S. На рис. 2.3 вверху показан недеформированный стержень, внизу – удлиненный; сила F , растягивающая стержень, приложена к его свободному торцу.
Если деформация
мала |
l l0 |
(2.9) |
|
то можно считать выполненным закон Гука. Рассмотрим закон в форме
Fx k l |
(2.10) |

Здесь k– коэффициент упругости (жесткости) стержня, зависящий, очевидно, от материала образца, площади сечения S и длины стержня l0 .
Относительная деформация (относительное удлинение):
|
|
l |
|
|
|
|
l |
|
|
|
0 |
Напряжение: |
|
|
Fx |
|
S |
||
Используя (2.8) и (2.11) перепишем (2.12) в виде
kl0
S
Обозначив kl
E S0
(2.11)
(2.12)
(2.13)
(2.13 а)
приводим закон Гука к следующему виду: |
|
E |
(2.14) |
Здесь E – модуль Юнга.
Форма (2.14) записи закона Гука имеет следующие преимущества.
1.Модуль Юнга E определяется только материалом образца и не зависит от его размеров (как коэффициент упругости k );E – табличная величина. Например, для стали E =2,1∙1011 Па; 1Па=1Н/м2.
2.Коэффициент упругости стержня известных сечения S , длины l0 и материала (E), можно вычислить с помощью
формулы (2.13 а):
k |
E S |
(2.15) |
|
l0 |
|||
|
|