

1.КИНЕМАТИКА
1.1ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Кинематикой называют раздел механики, изучающий способы (не причины!) описания движений и связь между величинами, характеризующими эти движения.
МОДЕЛИ МЕХАНИЧЕСКИХ СИСТЕМ:
Материальная точка (МТ) – любой объект, формой и размерами которого в данной задаче (в данных условиях) можно пренебречь;
Набор конечного числа материальных точек – достаточно общая модель произвольной механической системы.
Абсолютно твёрдое тело (АТТ) – тело, форма и размеры которого при наличии тех воздействий, что описаны в условиях задачи, могут считаться неизменными. АТТ можно рассматривать как набор материальных точек с неизменными расстояниями между ними.
Система отсчета - тело отсчёта, жёстко связанная с ним система координат и часы
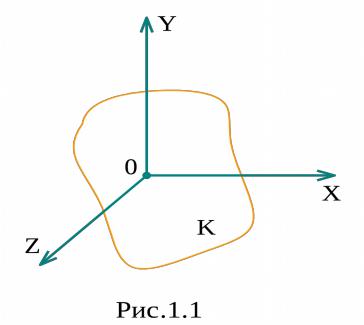
О – начало координат (начало отсчёта); K – название системы отсчёта
Положение МТ в пространстве в определённый момент времени задаётся
тремя её координатами (например, декартовыми) или радиус-вектором : |
||
rx x , ry y , r |
z . |
(1.1) |
z |
|
|
При движении МТ её координаты становятся функциями времени: |
|
|
x x(t) , y y(t), |
z z(t) . |
(1.2 а, б, в) |
Аналогично, |
|
|
r r (t) . |
|
(1.3) |
Закон движения МТ – правило, по которому можно определить её положение в любой момент времени.
P.S. Закон движения (1.2 а, б, в) можно рассматривать как уравнения траектории, заданной в параметрическом виде (в роли параметра t).
ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m)
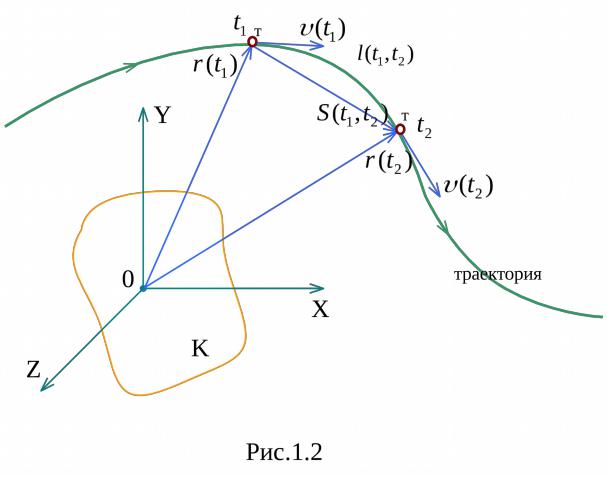
– радиус-вектор в момент , |
– в момент , |
|
|
– |
|||||
r |
(t1 ) |
|
|
перемещение за промежуток времени |
|
, |
|
||
|
|
|
1 |
2 |
|
|
2 |
||
r |
|
|
– путь за |
|
|
||||
|
|
r |
|
(длинаtотрезкаr (t ) траектории), t |
|
||||
|
|
,t–)мгновенная скорость в момент времени |
, (t1,t2 ) |
||||||
|
|
s(t |
|||||||
|
|
1 |
|
2 |
|
|
|
|
|
|
l(t1,t2 ) |
– мгновенная скорость в момент t |
. |
|
|
||||
|
(t1,t2 ) |
|
2 |
|
|
|
|||
|
(t1 ) |
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
1 |
|
(t2 )

PS. Векторы скорости |
|
(t |
и) |
(t–)касательные к траектории. |
|||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Очевидно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При малых t t |
|
|
s(t1 ,t2 ) r (t2 ) r (t1 ) r |
|
|
||||||||||||||||||||
|
tочевидно, что |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(t ,t |
) |
|
l(t |
.,t |
) |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Средняя скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
s(t ,t |
2 |
) |
|
|
r |
|
|
|
|||
|
|
|
|
|
υ |
(t ,t |
2 |
) |
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
ср 1 |
|
|
|
|
|
t2 |
t1 |
|
|
Δt |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Мгновенная скорость |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|||||
|
|
|
|
(t) lim ср (t, t t) lim |
t |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
t 0 |
|
|
|
|
|
|
|
|
|
|
t 0 |
|
|||||
PS. Другой вид математической записи («точка» обозначает производную по времени)
|
|
|
.dr |
|
|
|
|
|
|
|
|
|
|||
|
|
(t) dt |
|
|
|
|
|
Средняя путевая скорость |
|
r |
|
|
|||
|
|
|
|
|
|
|
|
ср( ) l( t1 |
,t2 |
) l |
|
||||
|
|
||||||
|
|
|
t2 t1 |
|
t |
|
|
– путь, пройденный за |
. |
|
При |
получаем: |
|||
l l(t2 ,t1) |
t t2 t1 |
t 0 |
Мгновенная путевая скорость (при |
t 0): |
|
|
( ) lim |
|
l |
|
|
|
|
( ) dl |
|||||||||||||
|
|
|
|
|
t 0 |
t |
|
|
|
|
|
|
dt |
|||||||||||
|
|
|
|
|
|
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Среднее ускорение за промежуток времени (t1, t2): |
|
|
|
|
|
|
|
|
υ(t |
|
)-υ(t ) |
|
|
|||||||||||
|
|
aср (t1,t2 ) |
|
2 |
1 |
t |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 -t1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Мгновенное ускорение (в момент t): |
|
a(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
d 2r |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Очевидно: |
|
a |
r |
|
dt |
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PS.1. Если закон движения задан, например, известна зависимость r (t) , то мы имеем о движении полную информацию, и все величины, определённые равенствами (1.6) – (1.14) легко вычисляются, точно так же, как и их проекции на декартовы оси.
PS.2 Переход r (t) (t) и (t) a(t) выполняется с помощью дифференцирования.

Обратно: (t) r (t) , a(t) (t) |
выполняется с помощью интегрирования. |
|||||||
Чтобы найти r (t) по заданной (t) , необходимо знать начальное значение |
r0 r (0) |
|||||||
|
|
|
t |
|
|
|
t |
|
|
r (t) r (0) |
|
0 |
|
|
|
||
|
|
(t')dt' r |
(t')dt' |
|
||||
|
|
|
0 |
|
|
|
0 |
|
|
|
|
t |
|
|
|
t |
|
Аналогично: |
(t) (0) a(t')dt' 0 |
a(t')dt' |
|
|||||
|
|
|
0 |
|
|
|
0 |
|
Пример 1. |
a const . Тогда можно найти |
0 at |
|
|||||
Пусть МТ движется с |
|
|||||||
2
at
Интегрируя ещё раз, получаем закон движения: r (t) r0 0t 2
Это равенства, связывающие кинематические величины в общем случае, т.е. при произвольном движении МТ.
Пример 2. (из школьной жизни!). Прямолинейное равноускоренное движение.
2as 2 0 |
2 ; |
|
|
|
|
s 0t at |
2 |
2; |
|
|
|
|
Очевидно, что |
s (t); |
|
||
0 at; |
|
|
|||
|
|
a (t) |
s (t). |
||
a const.
Векторные равенства можно записать в проекциях на оси координат:
( x )ср x , |
x dx , |
|||||
|
t |
|
|
dt |
|
|
( ax )ср |
x |
, |
ax |
d x |
, |
|
t |
dt |
|||||
|
|
|||||
0 |
t |
( t )dt , |
x |
||
x( t ) x |
|
|
|
0 |
|
t
x ( t ) 0 x ax ( t )dt
0
и т.д.
(1.20а,б)
(1.21а,б)
(1.22)
(1.23)

1.2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ.
УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ.
|
d |
|
a(t) dt |
|
|
|
||
Очевидно, при криволинейном движении ускорение материальной точки отлично от нуля, |
||||||
т.к. вектор скорости изменяется по |
величине |
и по направлению. |
||||
Представим вектор скорости МТ в виде |
|
где |
|
|
|
1 |
|
|
|||||
т.е. – единичный вектор, направленный по скорости |
|
|||||
Продифференцируем уравнение
Обозначим:
: |
|
d |
d |
d |
a |
dt |
dt |
dt |
d a dt
|
d |
an |
dt |
|

a a an
Первое слагаемое a – касательное или тангенциальное ускорение:
a |
|
|
при d dt 0 |
||
a |
|
|
d |
dt |
0 |
|
|
при |
|
|
|
Второе слагаемое - an называется нормальной составляющей
она нормальна, т.е. перпендикулярна, к вектору скорости (см. ниже!).
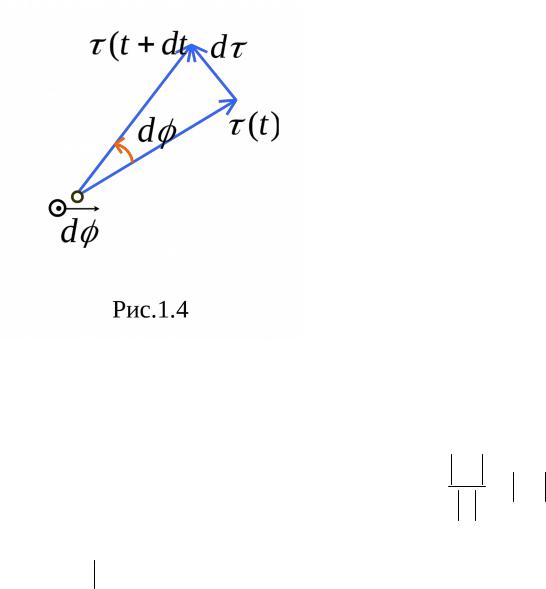
Можно считать: d (t)
d
Рассматривая этот треугольник как бесконечно малый сектор, имеем d
Но |
|
|
|
1 . |
Отсюда |
|
d |
|
|
|
d |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|