

Механика практикум_уч.пособие
.pdf
|
|
|
|
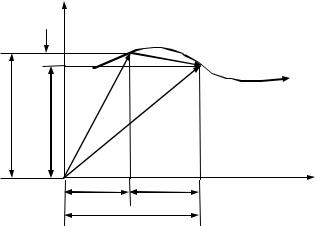
где m - масса шарика, |
|
|
||||
|
|
|
|
|
g - ускорение свободного падения; |
|||||
|
|
|
|
|
D - диаметр колеса; |
|
|
|||
|
|
|
D |
|
d - диаметр шарика; |
|
||||
|
|
|
|
N - число колебаний; |
|
|||||
I |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
t - время N колебаний; |
|
||||
|
|
|
d |
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
Таблица измерений |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
m, |
g, |
D |
Dси |
d |
|
dси |
N |
|
t, |
tси, |
г |
м/с2 |
см |
мм |
мм |
|
мм |
|
|
с |
с |
|
|
|
|
|
|
|
|
|
|
|
80 |
9,81 |
55,0 |
1 |
26,9 |
|
0,1 |
|
|
10,60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,56 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
10,63 |
0,01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,65 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,54 |
|
|
|
|
|
|
|
|
|
|
|
|
10-3м |
|
10-2м |
10-3м |
10-3м |
10-3м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подпись преподавателя |
|||
|
|
Обработка результатов эксперимента |
|
|
||||||
1.Расчет среднего значения t и случайной погрешности времени по методу Стьюдента.
|
ti |
|
|
|
t i |
ti2 |
|
P |
tPN |
tсл |
|
t |
|
||||||||
|
|
|
|
|
|
|
|
|
||
|
10,60 |
10,596 |
0,004 |
0,000016 |
0,02064 |
0,95 |
2,8 |
0,058 |
||
|
|
|
|
|
|
|
|
|
|
|
|
10,56 |
|
|
|
0,036 |
0,001296 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,63 |
|
|
|
0,034 |
0,001156 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,65 |
|
|
|
0,054 |
0,002916 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,54 |
|
|
|
0,056 |
0,003136 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полная погрешность прямых измерений времени
t 
 t сл2 tси2 tсл 0,06 с
t сл2 tси2 tсл 0,06 с
Округлим среднее значение времени до того знака, в котором содержится
31

погрешность t = 10,60 с.
2. Переведем данные в систему СИ:
D = 0,550 м
D = Dси= 0,001 м d = 0,0269 м
d = dñè= 0,0001 м m = 0,08 кг
3. Расчет среднего значения момента инерции по расчетной формуле:
|
|
|
0.08 |
|
9.81 10.60 2 0.55 0.0269 |
|
0.0269 2 |
|
0.55 0.0269 2 |
|
||
J |
|
|
|
|
||||||||
|
|
|
|
|
|
|||||||
2 |
8 2 32 |
5 |
2 |
|||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
=2.9168 10 2 кг м2.
4.Расчет погрешности косвенных измерений момента инерции методом
приращения функции.
Подставим в расчетную формулу t t t = 10,60 + 0,06 = 10,66 с.
J t t = 2.957 10 2 кг м2.
Jt J t t J = 2.957 10 2 - 2.9168 10 2 = 0.041 10 2 кг м2.
Подставим в расчетную формулу D D = 0,551 м.
J D D = 2.92071 10 2 кг м2.
J D J D D J = 2.92071 10 2 - 2.91682 10 2 = 0.004 10 2 кг м2.
Подставим в расчетную формулу d d = 0,0270 м.
J d d = 2.91720 10 2 кг м2.
Jd J d d J = 2.91720 10 2 - 2.91682 10 2 = 0.0004 10 2 кг м2.
Видно, что на величину искомой погрешности сильнее всего влияет неточное измерение времени; влияние диаметра колеса на порядок , а диаметра шарика на два порядка меньше. Поэтому меньшими погрешностями
в выражении J 
 Jt2 JD2 Jd2 можно пренебречь.
Jt2 JD2 Jd2 можно пренебречь.
J Jt = 0,04 102 кг м2.
5. Расчет относительной погрешности J 100% .
J
32

0,042,92 100% = 1,4 %.
Вывод: В процессе эксперимента получено следующее значение момента инерции махового колеса:
J 2,92 0,04 102 кг м2
при доверительной вероятности Р = 0,95, числе измерений N= 5 и относительной погрешности = 1,4 %.
5.Контрольные вопросы
1.Какие измерения называются прямыми, косвенными?
2.Дайте определения систематической и случайной погрешностей.
3.Дайте понятие об абсолютной и относительной погрешностях.
4.Что называют вероятностью случайной величины? Поясните практический смысл вероятности.
5.Какие предположения лежат в основе распределения Гаусса?
6.Поясните смысл функции распределения f a и параметра H . Как от этого параметра зависит форма кривой Гаусса?
7.Что называют доверительной вероятностью и доверительным интервалом? Чему равен доверительный интервал при Р = 0,68; 0,95; 0,997 и большом числе наблюдений?
8.Поясните смысл параметра . Как этот параметр связан с H ?
9.Как рассчитывается случайная погрешность прямых измерений?
10.Как находится систематическая погрешность прямых измерений?
11.Что такое класс точности измерительного прибора?
12.Чему равна полная погрешность прямых измерений?
13.Как рассчитать погрешность косвенных измерений?
6. Пример варианта контрольного задания
1.Какие измерения называются прямыми, косвенными ?
33
2. При проведении эксперимента были получены следующие значения измеренной величины 4,35; 4,40; 4,36. Найдите случайную абсолютнуюaсл и относительную погрешности измерения.
3.При обработке результатов эксперимента были получены случайная aсл = 5,65 103 и систематическая aси = 1,5 102 погрешности. Рассчитайте полную абсолютную погрешность величины a.
4.Методом логарифмирования функции получите формулу для расчета относительной погрешности при косвенных измерениях.
|
|
h1 |
; |
f (h1, h2 ) . |
|
h1 |
h2 |
||||
|
|
|
5. В процессе эксперимента получено среднее значение ускорения свободного падения g = 9.83256 м/с2. При этом абсолютная погрешность составила g = 0,2556 м/с2. С учетом правил округления представьте результат по выполненной работе.
34
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
1.КИНЕМАТИКА
1.1.Основные понятия раздела “Кинематика”
Кинематика - это раздел механики, в котором изучаются способы математического описания движения без выяснения его физических причин.
В механике рассматривается не движение реальных объектов, а их моделей.
Материальная точка - тело, размерами которого в условиях данной задачи можно пренебречь.
Абсолютно твердое тело, или, короче, твердое тело - это система материальных точек, расстояния между которыми не меняются в процессе движения.
Системой отсчета называется тело отсчета вместе с приборами для измерения расстояний и промежутков времени. С телом отсчета часто свя-
зывается система координат.
Траекторией называется линия, по которой материальная точка движется в пространстве.
Все возможные движения твердого тела можно делятся на пять видов: 1) поступательное, 2) вращение вокруг неподвижной оси, 3) плоское движение, 4) движение вокруг неподвижной точки и 5) свободное движение. Первые два движения являются основными, т.к. остальные виды можно свести к совокупности основных движений.
Поступательное движение твердого тела - это такое движение, при котором любая прямая, связанная с телом, все время остается параллельной своему начальному положению. При поступательном движении все точки твердого тела за один и тот же промежуток времени совершают одинаковые перемещения и поэтому скорости и ускорения всех точек тела в один и тот же момент времени одинаковы.
35
При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, которая называется осью вращения.
Существуют три способа описания движения: векторный, координатный и “естественный”. Приведем определения кинематических величин для каждого способа описания.
1.2. Определения кинематических величин
Положение и перемещение материальной точки
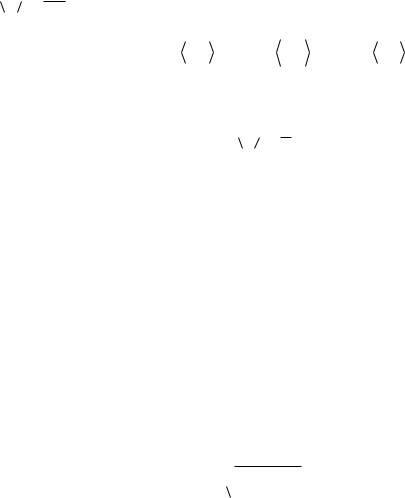
При векторном способе описания положение материальной точки определяется радиусом-вектором r(t), проведенным от некоторой неподвижной точки О выбранной системы отсчета к рассматриваемой точке. При координатном способе описания положение материальной точки определяется ее координатами x(t), y(t), z(t). При естественном способе описания положение точки задается с помощью криволинейной координаты s(t). Для этого на траектории указывается начало координат и положительное направление отсчета координаты s.
у
|
|
|
s |
|
|
y |
|
r |
траектория |
|
|
|
s |
|
y(t+ t) |
|
r(t) |
|
|
|
r(t+ t) |
|
||
y(t) |
|
|
||
|
|
|
||
|
|
|
|
|
|
О |
x(t) |
x |
х |
|
|
|
||
|
|
x(t+ t) |
|
|
Вектор перемещения r = r(t+ t)-r(t). Перемещения по осям коорди-
нат x = x(t+ t) - x(t), y = y(t+ t) - y(t), могут быть как положительными (точка перемещается по оси координат), так и отрицательными (точка перемещается против оси координат). При естественном способе описания рассматривается изменение криволинейной координаты s = s(t+ t) - s(t).
36
Скорость
Средней скоростью перемещения называется отношение вектора перемещения к тому промежутку времени, за который это перемещение про-
изошло:  v
v rt . При координатном способе описания вводятся средние
rt . При координатном способе описания вводятся средние
значения проекций скорости v x |
|
x |
, |
v у |
|
у |
, |
v z |
|
z |
. Средней |
|
t |
t |
t |
||||||||||
|
|
|
|
|
|
|
|
|
путевой скоростью называется отношение пути s к тому промежутку вре-
мени t, за который этот путь пройден:  v
v  st .
st .
Мгновенная скорость - это скорость в данный момент времени. Устремив t 0, получаем:
v lim |
r dr |
, |
t 0 |
t dt |
|
т.е. вектор скорости точки в данный момент времени равен производной от радиуса-вектора r по времени t. Аналогично определяются проекции вектора скорости:
v x lim |
x |
|
dx |
, |
v y lim |
y |
|
dy |
. |
t |
dt |
t |
|
||||||
t 0 |
|
|
t 0 |
|
dt |
||||
Модуль вектора мгновенной скорости легко находится по теореме Пифа-
гора. При двумерном движении v 
 v x2 vy2 . При естественном способе
v x2 vy2 . При естественном способе
описания мгновенная скорость равна производной от криволинейной координаты по времени:
v lim |
s |
|
ds |
. |
t |
|
|||
t 0 |
|
dt |
||
Мгновенная скорость всегда направлена по касательной к траектории.
Ускорение
Ускорение характеризует быстроту изменения скорости.
При векторном способе описания среднее ускорение равно отношению изменения скорости к тому промежутку времени, за который это произошло это изменение:
37
a v(t t) v(t) v
t t
При координатном способе описания средние значения проекций ус-
корения определяются следующими выражениями:
a |
|
|
v |
x |
(t t) v |
x |
(t) |
|
v |
x |
, |
a |
|
|
v y (t t) v y (t) |
|
v y |
. |
x |
|
|
|
|
y |
|
|
|||||||||||
|
|
|
|
|
|
|
t |
t |
||||||||||
|
|
|
|
t |
|
|
|
t |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Чтобы перейти к мгновенным значениям ускорения, следует устремить t 0.
a lim |
v dv |
, |
t 0 |
t dt |
|
т.е. ускорение равно производной вектора скорости по времени. Аналогичными выражениями определяются проекции вектора ускорения:
ax lim |
v |
x |
dv |
x |
, |
ay lim |
v y |
|
dv y |
. |
|
|
|
t |
dt |
||||||
t 0 |
t |
dt |
t 0 |
|
|
|||||
Модуль вектора мгновенного ускорения легко находится по теореме Пифагора. При двумерном движении a 
 ax2 a2y .
ax2 a2y .
Перейдем к естественному способу описания движения. Поскольку скорость может изменяться как по величине, так и по направлению, с каждым из этих изменений связана составляющая вектора полного ускорения.
Составляющая ускорения, характеризующая быстроту изменения ско-
рости по величине, называется тангенциальным ускорением. Она связана с приращением вектора скорости, направленным по касательной к траектории, как и сама скорость. При ускоренном движении тангенциальная составляющая совпадает с вектором скорости, при замедленном - противоположна. Величина тангенциального ускорения равна производной от модуля вектора скорости по времени:
a ddtv .
Составляющая ускорения, характеризующая быстроту изменения ско-
рости по направлению, называется нормальным ускорением. Она связана с приращением вектора скорости, направленным перпендикулярно касательной к траектории и равна
38

an |
v 2 |
a |
v |
|
|
, |
|||
|
|
|
||
|
R |
|
|
|
где R - радиус кривизны траектории. Нор- |
|
|
||
мальное ускорение всегда направлено к |
|
|
||
центру кривизны траектории: |
an |
a |
||
Вектор полного ускорения
a a n a
Его модуль легко найти по теореме Пифагора:
a
 a2 an2 .
a2 an2 .
1.3.Кинематика вращательного движения
Положение точки при ее движении по окружности
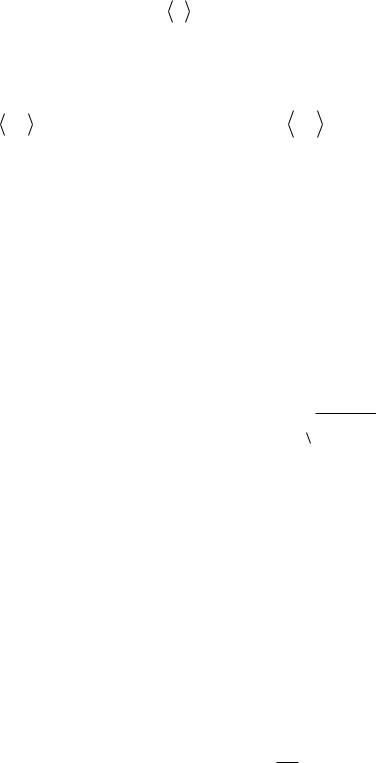
При вращательном движении по окружности радиуса R ее положение можно задать угловой координатой (t), а ее перемещение - изменением
угловой координаты = (t+ t) - (t). |
|
Бесконечно малый угол поворота d можно |
v |
рассматривать как псевдовектор, направление |
v |
которого связано с направлением вращения пра- |
|
вилом правого винта (или правилом буравчика). |
|
При движении по часовой стрелке d направлен |
R |
перпендикулярно плоскости рисунка “от нас”, при движении против часовой стрелки - “к нам”.
Число оборотов при вращательном движении связано с углом пово-
рота соотношением: N . 2
Угловая скорость
Угловая скорость характеризует быстроту вращения. Средняя угловая скорость равна отношению угла поворота к тому промежутку времени, за который произошел этот поворот:

 .t
.t
39

Мгновенная угловая скорость равна производной угловой координаты по времени:
ddt .
Это псевдовектор, его направление связано с направлением вращения правилом буравчика.
Нередко вместо угловой скорости вводится частота вращения n, т.е. число оборотов за единицу времени, а также (в случае равномерного вращения) период T, т.е. время одного оборота.
2 n 2T .
Угловое ускорение
Угловое ускорение характеризует быстроту изменения угловой скорости. Среднее угловое ускорение равно отношению изменения угловой скорости к тому промежутку времени, за который произошло это изменение:

 .t
.t
Мгновенное угловое ускорение равно производной от угловой скорости по времени:
ddt .
Угловое ускорение - тоже псевдовектор; его направление совпадает с вектором угловой скорости при ускоренном вращении и противоположно ему - при замедленном вращении.
Связи между линейными и угловыми величинами
Движение по окружности - частный случай движения по криволинейной траектории. Поэтому оно характеризуется не только угловыми величинами - углом поворота, угловой скоростью и угловым ускорением, но и теми величинами, которые были введены при естественном способе описания, - криволинейной координатой s , скоростью, нормальным и тангенциальным ускорениями. Линейные и угловые величины связаны соотношениями:
40