

86) Приведение сил и моментов сил
Определим значения приведенных сил и моментов сил, принимая в качестве звена приведения ведущее звено, совершающее поступательное и вращательное движения.
Для этого воспользуемся вторым условием приведения, согласно которому для сохранения эквивалентности динамической модели реальному механизму работа или мощность условных сил или моментов сил, приложенных к звену приведения, должна быть равна сумме работ или мощностей всех реальных внешних сил и моментов сил, действующих на механизм
(1)

где Nп – мощность приведенной силы; Ni – мощность внешней силы; Fi – внешняя сила; Vi – скорость точки приложения внешней силы; αi – угол между векторами внешней силы и скорости точки её приложения; Mi – момент пары сил, приложенных к звену; ωi – угловая скорость звена; n – число подвижных звеньев.
Пусть звено приведения совершает поступательное движение. Тогда
Nп=Fп•VA ,
где
Fп
– приведенная
сила;
VA
–
скорость
т. А
звена.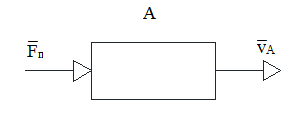
Подставляя это выражение в (1), получим
FП = NП /VA = / VA = ( Fi Vi cos αi / VA + Mi ωi). (2)
Приведенной силой называется такая условная сила, приложенная к звену приведения, работа или мощность которой равна сумме работ или мощностей всех внешних сил и моментов сил, действующих на звенья механизма.
Если звено приведения совершает вращательное движение, то
Nп=Mп•ω ,
где Mп – приведенный момент сил; ω – угловая скорость
звена приведения.
Подставляя
это выражение в (1), получим

MП = NП / ω = / ω = ( Fi Vi cos αi / ω + Mi ωi / ω). (3)
Приведенным моментом сил называется такой условный момент, приложенный к звену приведения, работа или мощность которого равна сумме работ или мощностей всех внешних сил и моментов сил, действующих на звенья механизма.
Установим связь между приведенной силой и приведенным моментом сил.
Если известен приведенный момент, то из условия
Nп=Fп•VA=МП•ω

приведенная сила равна
FП
=
 =
= =
= ,
,
так как VA=ω•lOA .
Если известна приведенная сила, то приведенный момент
MП =FП • lOA.
Для
нахождения приведенных сил можно

использовать рычаги Жуковского, так как приведенные
силы будут направлены в сторону, противоположную
направлению уравновешивающих сил.
При решении практических задач приведенные силы и моменты сил обычно разделяют на две составляющие: приведенные движущие силы и моменты сил и приведенные силы и моменты сил сопротивления.
87) Приведение масс и моментов инерции звеньев
Для нахождения приведенных масс и моментов инерции воспользуемся первым условием приведения, согласно которому для сохранения эквивалентности динамической модели реальному механизму необходимо, чтобы кинетическая энергия звена приведения была равна сумме кинетических энергий всех звеньев механизма:
ТП
=
 (4)
(4)
где ТП – кинетическая энергия звена приведения; Ti – кинетическая энергия i-того звена; n – число подвижных звеньев.
Пусть звено приведения совершает поступательное движение. Тогда
TП
= mП
VA2/2,

где mП – приведенная масса; VA – скорость т. А звена.
Кинетическая энергия всех звеньев механизма
Подставляя эти выражения в (4), получим


Откуда приведенная масса
 (5)
(5)
Приведенной массой механизма называется такая условная масса, сосредоточенная в точке приведения, кинетическая энергия поступательного движения которой равна сумме кинетических энергий всех звеньев механизма.
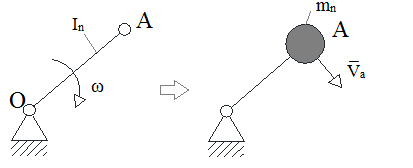
Если звено приведения совершает вращательное движение, то
ТП
= ,
,
где In – приведенный момент инерции; ω – угловая скорость
звена приведения.
Подставляя в (4), будем иметь


Откуда приведенный момент инерции
 (6)
(6)
Приведенным моментом инерции механизма называется такой условный момент инерции, создаваемый приведенной массой во вращательном движении относительно оси вращения звена приведения, кинетическая энергия которого равна кинетической энергии всего механизма.
Установим связь между приведенной массой и приведенным моментом инерции. Если известен приведенный момент инерции, то из условия
 ,
,
получим
mП
=
так как VA=ω•lOA .
Рассмотрим пример: получить динамическую модель кривошипно-ползунного механизма (см. рис. а), если известны длины звеньев, положения их центров масс (S1, S2 и S3), моменты инерции звеньев относительно осей, проходящих через центры масс, линейные и угловые скорости звеньев и их центров масс, а также их направления, угловые скорости кривошипа и шатуна и сила полезного сопротивления (FПС), приложенная к звену 3.
Вычерчиваем
механизм в выбранном масштабе длин ( ),
в заданном положении кривошипа1
(см.
рис. а).
),
в заданном положении кривошипа1
(см.
рис. а).

В качестве звена приведения выберем кривошип 1 (см. рис. б). Тогда
приведенный момент инерции на основании (6)


где Js1 ,, Js2 – моменты инерции звеньев относительно
осей, проходящих через центры масс; m2, m3 – массы
звеньев; 1, 2 – угловые скорости звеньев; Vs2 , VB –
линейные скорости звеньев.
Приведенный момент сил согласно (3)

где G2 = m2g – cила тяжести звена 2; g – ускорение свободного падения; FПС – сила полезного сопротивления.
Если
за точку
приведения выбрать
т. А,
то, используя вышеприведенные зависимости,
можно получить эквивалентные значения
приведенной массы и приведенной силы:
mП
= ;
FП
=
;
FП
=
 .
.