

2.4. Геометрическая интерпретация напряженного состояния
Прежде всего дадим геометрическую интерпретацию напряженного состояния изотропного тела, отобразив это состояние в трехмерном пространстве главных нормальных напряжений 1, 2, 3 (рис. 4).
Начало координат соответствует отсутствию напряжений в теле. На осях координат лежат точки, отображающие простое растяжение или сжатие вдоль этих осей. На координатных плоскостях 12,23, 13 расположены точки, отображающие плоское напряженное состояние.
Прямая, наклоненная под одинаковыми углами (cos = 3-0,5) ко всем трем координатным осям, называется пространственной диагональю или гидростатической осью. Она определяет положение точек, соответствующих гидростатическому состоянию:
1 = 2 = 3 = P.
Единичный вектор
h,
направленный вдоль гидростатической
оси, о пределяется
выражением
пределяется
выражением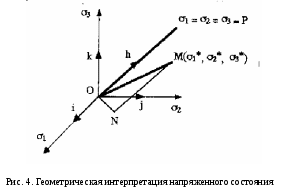


h
=
![]() (i
+ j
+ k),
(i
+ j
+ k),
где i, j, k – единичные вектора по направлению осей 1, 2, 3 (рис. 4). Плоскость, проходящая через начало координат (т.О) и перпендикулярная вектору h, называется девиаторной плоскостью.
Так как направление нормали к девиаторной плоскости задается проекциями вектора h на оси координат, то из общего уравнения плоскости, проходящей через рассматриваемую точку с координатами (1*, 2*, 3*),
A(1 – 1*) + B(2 – 2*) + C(3 – 3*) = 0,
где A = i, B = j, C = k, следует, что уравнение такой плоскости имеет вид
1 + 2 + 3 = 0.
Любая точка M трехмерного пространства 1, 2, 3, имеющая координаты 1*, 2*, 3*, изображает некоторое напряженное состояние, характеризуемое главными напряжениями 1, 2, 3 (Рис. 4).
Дадим геометрическую интерпретацию величинам ср и i. В качестве образа напряженного состояния мы будем рассматривать не точку М, а вектор ОМ, соединяющий начало координат О с точкой М(1, 2, 3):
ОМ = *i + 2* j + 3* k.
Если мы разложим вектор OM, характеризующий напряженное состояние, на составляющие MN и ON, параллельную и перпендикулярную гидростатической оси, соответственно, то составляющая MN определится выражением MN = (OM h)h , где
OM·h
= (1*i
+ 2*j
+
3*k)·![]() (i
+
j
+
k) =
(i
+
j
+
k) =
= (1*
+ 2*
+ 3*)/
![]() =
ср
=
ср![]() .
.
Следовательно
MN
=
ср![]() h
=
ср(i
+ j
+ k),
h
=
ср(i
+ j
+ k),
т.е. проекция вектора напряжений OM на гидростатическую ось пропорциональна величине среднего напряжения ср.
Учитывая выражения для векторов MN и OM, можно записать
ON = OM – MN = (1*i + 2*j + 3*k) – ср(i + j + k) =
= (1 – ср)i + (2 – ср)j + (3 – ср) k.
В последнем выражении величины, находящиеся в круглых скобках, представляют собой главные нормальные девиаторные напряжения
s1 = (1 – ср), s2 = (2 – ср), s3 = (3 – ср).
Так как вектор ON по определению перпендикулярен гидростатической оси, то он должен лежать в девиаторной плоскости. Иначе говоря, проекции вектора напряжений OM (1*, 2*, 3*) на девиаторную плоскость равна «вектору девиаторных напряжений» s1 , s2 , s3. Иначе это можно выразить и так: точка N – проекция точки M на девиаторную плоскость – изображает девиаторные напряжения, отвечающие точ-ке M. Любой вектор, принадлежащий девиаторной плоскости, характеризует девиатор напряжений какого-либо напряженного состояния M(1*, 2*, 3*).
Радиальное расстояние между любой точкой, находящейся на гидростатической оси, и точкой M, расположенной на плоскости, параллельной девиаторной плоскости (в частности, расстояние между точкой O (начало координат) и точкой N, расположенной на девиаторной плоскости, проходящей через начало координат), найдем по известной (раздел курса математики «Аналитическая геометрия в пространстве») формуле
ON
=
![]() ·[(1*
–
2*)2 +
(2*
–
3*)2 +
(1*
–
3*)2]
/ 6 ]0.5 =
20.5·i.
·[(1*
–
2*)2 +
(2*
–
3*)2 +
(1*
–
3*)2]
/ 6 ]0.5 =
20.5·i.
Иначе говоря, радиальное расстояние от гидростатической оси линейно зависит от интенсивности касательных напряжений i.
Появление вектора ON связано с неравнокомпонентностью напряженного состояния. Совершенно очевидно, что когда рассматриваемая точка M находится на гидростатической оси, то вектор главных девиаторных напряжений ON отсутствует в силу того, что s1 = 0, s2 = 0, s3 = 0.
Так как увеличение радиального расстояния ON означает увеличение интенсивности касательных напряжений i , то для каждой точки M вектор ON определяет величину девиаторного напряжения, которое вызывает появление сдвигов, т.е. вектор ON определяет условие текучести для данного напряженного состояния.
Так как точка N является проекцией на девиаторную плоскость и любой другой точки, лежащей на прямой MN, то вектор главных нормальных девиаторных напряжений ON = s1i + s2j + s3k является общим для всех точек любой прямой, перпендикулярной девиаторной плоскости. По этой причине если условие текучести выполняется для точки N , то оно будет выполняться и для всех точек бесконечной прямой NM. Все комбинации s1, s2, s3, для которых выполняется данное условие текучести, образуют на девиаторной плоскости кривую текучести. Кривая текучести в девиаторной плоскости является направляющей цилиндра, образующие которого параллельны гидростатической оси. В пространстве главных нормальных напряжений возникает цилиндр текучести.