

Ответы Корначук СК71
.pdf7. Фазовый компенсатор. Обычно они выполняются |
как |
усилители |
с фазовой |
||
Wk |
Kk T1p 1 |
|
|||
|
|
|
, |
|
|
|
T2 p 1 |
|
T2 . |
||
форсировкой и передаточная функция их имеет вид: |
|
где T1 |
|||
8.ДЕТЕКТОРЫ НЕЙТРОНОВ системы располагаются либо в специальных каналах в бетонной защите реактора, либо в каналах самой активной зоны: датчики внешнего контроля и датчики внутриреакторного контроля. dIik=Kik*dN*No.
Система является существенно нелинейной из-за наличия нелинейного контактора. Коэффициент передачи системы одновременно является функцией частоты и амплитуды, поэтому для анализа системы используют метод гармонического баланса.
Анализ работы релейной системы методом гармонического баланса сводится к разделению системы на линейную часть, коэффициент передачи которой зависит от частоты входного сигнала, и на нелинейную часть, гармонический коэффициент которой зависит от амплитуды входного сигнала.
Если такое разделение возможно, то общий коэффициент передачи разомкнутой САР можно представить как произведение: K * A x * G w , где
A x - гармонический коэффициент передачи реле,
G w - передаточная функция линейной части системы,
K - коэффициент усиления системы, не зависящий ни от частоты, ни от амплитуды входного сигнала.
Тогда для замкнутой системы с единичной обратной связью передаточная функция может
|
|
|
K * A * G |
K * A |
||
|
|
|
|
|
. |
|
быть представлена как: |
1 K * A * G |
G 1 K * A |
||||
Условием |
нахождения системы |
на границе устойчивости будет равенство |
||||
1 K * A * G 0 |
или G 1 |
K * A 0 |
|
|
||
Поэтому анализ устойчивости системы можно проводить, сравнивая годографы K * A |
||||||
и G 1. Это сравнение может проводиться в комплексной плоскости (метод Гольдфарба)
или в полярных |
координатах (метод Кохенбургера). Годограф G 1 строится для всех |
|||
значений частот, |
а годограф |
K * A строится для |
всех |
значений амплитуд. Если |
годографы не пересекаются, то |
система устойчива, |
в ней |
отсутствуют автоколебания. |
|
Если годографы пересекаются, то в системе имеются автоколебания с частотой и амплитудой, определяемыми точкой пересечения годографов.
В годограф линейной части системы входят передаточные функции реактора и исполнительного двигателя. Что касается остальных звеньев системы, то они являются безинерционными и входят в постоянный коэффициент усиления системы K .
Запасы устойчивости можно определить следующим образом: минимальное по радиусу расстояние между годографами дает запас устойчивости по модулю, а минимальное угловое расстояние от точки обрыва годографа A * K до годографа G 1 дает запас устойчивости по фазе.
Если годографы пересекаются, то система не является устойчивой и сбить автоколебания можно, уменьшая коэффициент усиления системы, то есть скорость введения реактивности U.

2.3 Анализ динамики релейной системы регулирования мощности ЯР. Компенсация фазового запаздывания выходного сигнала. Устранение автоколебаний.
Анализ работы релейной системы методом гармонического баланса сводится к разделению системы на линейную часть, коэффициент передачи которой зависит от частоты входного сигнала, и на нелинейную часть, гармонический коэффициент которой зависит от амплитуды входного сигнала.
Если такое разделение возможно, то общий коэффициент |
передачи разомкнутой САР |
|
можно представить как произведение: |
K * A x * G w , |
где A x - гармонический |
коэффициент передачи реле, G w - передаточная функция линейной части системы,
K - коэффициент усиления системы, не зависящий ни от частоты, ни от амплитуды входного сигнала.
Тогда для замкнутой системы с единичной обратной связью передаточная функция может
|
|
|
K * A * G |
|
K * A |
|
|
|
|
|
. |
||
быть представлена как: |
1 K * A * G |
G 1 K * A |
||||
Условием нахождения системы на границе устойчивости будет равенство |
||||||
1 K * A * G 0 или |
G 1 |
K * A 0 |
|
|
|
|
Поэтому анализ устойчивости системы можно проводить, сравнивая годографы K * A и
G 1. Это сравнение может проводиться в комплексной плоскости или в полярных координатах. Годограф G 1 строится для всех значений частот, а годограф K * A строится для всех значений амплитуд. Если годографы не пересекаются, то система устойчива, в ней отсутствуют автоколебания. Если годографы пересекаются, то в системе имеются автоколебания с частотой и амплитудой, определяемыми точкой пересечения годографов. В годограф линейной части системы входят передаточные функции реактора и исполнительного двигателя. Что касается остальных звеньев системы, то они являются безинерционными и входят в
постоянный коэффициент усиления системы K .
Запасы устойчивости можно определить следующим образом: минимальное по радиусу расстояние между годографами дает запас устойчивости по модулю, а минимальное угловое расстояние от точки обрыва годографа A * K до годографа G 1 дает запас устойчивости по фазе.
Если годографы пересекаются, то система не является устойчивой и сбить автоколебания можно, уменьшая коэффициент усиления системы, то есть скорость введения реактивности U.
Если приемлемый переходный процесс не может быть получен только за счет изменения коэффициента усиления системы K, то в регулятор вводят устройства для
фазовой компенсации. Обычно они выполняются как усилители с фазовой форсировкой и |
||||
передаточная функция их имеет вид: |
||||
Wk |
Kk T1p 1 |
, |
|
|
T2 p 1 |
T1 T2 . |
|||
|
где |
|||
При этом выбор |
постоянной времени T1 производят по тому участку годографа |
|||
G 1 ,который располагается ближе всего к годографу A * K .
2.4 Процедура первого пуска ЯР. Проблема безопасности пуска.
Пуск проводится в два этапа: физический пуск и энергетический пуск. Во время физического пуска уровень мощности реактора ограничивают значением около 0,1 % Nном. Цель физического пуска – выход на состояние критичности при полной топливной загрузке и определение эффективности средств управления и контроля. После окончания физического пуска и проведения всех плановых работ производится энергетический пуск, в процессе которого реактор постепенно выводится на номинальный уровень мощности.
Комплект пусковой аппаратуры при физическом пуске состоит из:
–искусственного источника нейтронов, который допускает перестановку в другой технологический канал,
–пусковой ионизационной камеры деления, которую также нужно сделать переносной,
–измерительной пересчетной схемы.
ИСКУССТВЕННЫЕ ИСТОЧНИКИ. Существует несколько ядерных реакций типа ,n , в результате которых испускаются свободные нейтроны. Широко используется реакция:
Be ,n . Альфа–частица может быть получена в результате естественного распада
радиоактивных |
элементов радия Ra |
и |
полония Po . |
Наиболее распространен |
|||||||
источник Po210 Be . |
Он гораздо дешевле источника Ra Be.. |
Число нейтронов источника |
|||||||||
Po Be зависит от |
активности полония и от геометрии источника. Эффективность его |
||||||||||
такова, что 1 кюри дает около 26 н сек . |
|
|
|
|
|||||||
При физическом пуске стержни извлекаются медленно и |
|
||||||||||
поведение реактора в этом режиме хорошо описывается |
|
||||||||||
формулой |
|
|
размножения |
в |
подкритическом |
|
|||||
|
N |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
режиме: |
N0 |
1 K |
Скорость |
счета |
на |
выходе |
|
||||
|
|
|
|
|
|
||||||
измерительного |
канала будет |
определяться |
|
формулой: |
|
||||||
1
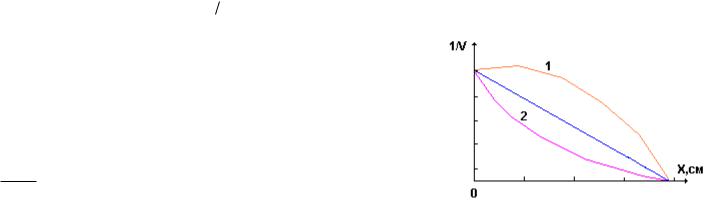
V A * 1 K , , где A – const. Когда обратная скорость счета становится равной нулю, реактор выходит в критическое состояние.
Путем многократных замеров устанавливают верное положение пусковой камеры относительно источника нейтронов. Если график идет по выпуклой кривой 1, то камера расположена слишком близко к источнику, если график идет по вогнутой кривой 2, то камера слишком удалена от источника нейтронов.
В процессе пуска необходимо осуществить изменение мощности на много порядков, так как диапазон от нулевой до номинальной мощности соответствует изменению плотности потока нейтронов от 102 до 1014 н/см2 · сек. Поэтому надежность и быстродействие контроля в процессе пуска является сложной технической проблемой.
Основная причина опасности периода пуска – большая погрешность измерительных приборов в данном диапазоне. Известно, что при малых изменениях измеряемой величины уменьшается статистическая точность измерений, поэтому приходится применять приборы с большой постоянной времени. Следовательно, если мощность начнет быстро нарастать во время пуска, то сигнал может быть воспринят системой управления или оператором управления слишком поздно.
Из соображений безопасности рассчитывают системы управления пуском на максимальную эффективность стержня.
2.5 Процедура повторного пуска ЯР. Источники нейтронов. Проблема безопасности.
При повторном пуске начальная плотность нейтронов сильно зависит от промежутка времени, прошедшего с момента остановки реактора до момента следующего включения.
Отрицательная реактивность, вызванная отравлением реактора ксеноном, достигает максимума примерно через 11 часов после остановки.
Выгорание топлива тоже изменяет К в подкритическом режиме, но в меньших размерах. Работавший реактор является источником запаздывающих нейтронов. Интенсивность запаздывающих нейтронов после остановки, как мы знаем, убывает с периодом 80 сек. поэтому в большинстве реакторов уже через 25 минут после остановки вклад запаздывающих нейтронов едва поддается измерению. Однако и этих 25 мин достаточно для повторного включения реактора с использованием только запаздывающих нейтронов. В процессе пуска необходимо осуществить изменение мощности на много порядков, так как диапазон от нулевой до номинальной мощности соответствует изменению плотности потока нейтронов от 102 до 1014 н/см2 · сек. Поэтому надежность и быстродействие
контроля в процессе пуска является сложной технической проблемой.
Основная причина опасности периода пуска – большая погрешность измерительных приборов в данном диапазоне. Известно, что при малых изменениях измеряемой величины уменьшается статистическая точность измерений, поэтому приходится применять приборы с большой постоянной времени. Следовательно, если мощность начнет быстро нарастать во время пуска, то сигнал может быть воспринят системой управления или оператором управления слишком поздно.
Из соображений безопасности рассчитывают системы управления пуском на максимальную эффективность стержня.
ФОТОНЕЙТРОННЫЕ ИСТОЧНИКИ. Реактор, как известно, является мощным источником гамма–излучения. Это излучение можно использовать для получения новых
нейтронов по реакции ,n , если энергия гамма–квантов больше энергии связи нейтрона в соответствующем ядре. Для дейтерия и бериллия энергия связи равна соответственно 2,21 и 1,62 Мэв, то есть меньше энергии гамма–квантов некоторых осколков деления. Поэтому эти элементы являются поставщиками фотонейтронов в реакторе. Чем дольше реактор находился в режиме рабочей мощности до остановки, тем больше будет мощность фотоисточника. В настоящее время вода и бериллий имеются в большинстве реакторов, поэтому нет необходимости специально вводить в реактор источники нейтронов для надежного контроля мощности в выключенном состоянии. Конечно, после остановки интенсивность гамма-излучения падает и снижается интенсивность фотоисточников нейтронов.
2.6 Выбор скорости изменения реактивности при пуске ЯР. Соображения эксплуатации и безопасности.
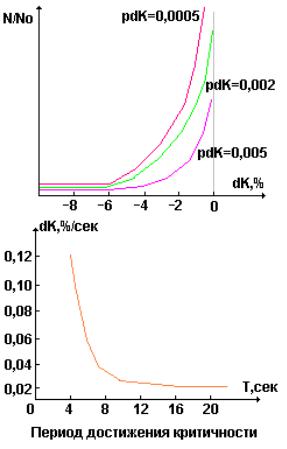
Из графика следует, что при бесконечно медленном изменении реактивности реактор никогда не станет критическим. С увеличением скорости изменения реактивности критичность наступает при все меньших плотностях потока нейтронов. В глубокой подкритике все кривые сливаются, так что здесь скорость изменения реактивности не имеет значения.
Зависимость периода достижения критичности от скорости изменения реактивности можно показать в виде следующего графика, из которого следует, что реактор можно довести до критичности с любым желаемым периодом.(рис 2.)
Продолжительность пускового периода зависит от скорости изменения реактивности. Имеются определенные рекомендации по выбору режима пуска. Рассмотрим основные из них: соображения эксплуатационные и соображения безопасности.
В зависимости от назначения требования к длительности пуска у разных реакторов разные. Для энергетической ядерной установки важно работать на мощности как можно дольше времени, для военной транспортной установки необходимо производить пуск
за кратчайшее время, для исследовательских реакторов рабочий цикл равен часто продолжительности рабочего дня и т.п.
В основе соображений безопасности пуска лежит требование, чтобы при выбранной скорости изменения реактивности система аварийной защиты успела надежно выключить установку в случае аварии. Чем быстрее скорость изменения δK, тем короче при заданной мощности период, величина которого является определяющим параметром при пуске, так как он служит мерой времени, имеющегося у оператора для предотвращения пусковой аварии. Пусковой аварией называют ситуацию, при которой реактивность неуклонно нарастает и ничего уже нельзя сделать для прекращения этого роста, пока мощность не достигнет некоторого большого значения, при котором срабатывает аварийная защита.
Для предотвращения этого необходимо при расчетах учитывать 2 условия:
|
|
|
|
N |
|
|
S * l * K 2 |
|
|
|
K |
|||
|
leff |
Tniz |
|
|
|
eff |
|
|
|
|||||
|
|
|
|
|
|
|
|
. |
||||||
Tverx |
|
dN |
|
K * S * leff |
dK |
|
dK |
|||||||
K |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
dt |
|
|
dt |
|
|
|
dt |
|||||

2.7 Система автоматического пуска ЯР по периоду и мощности.
Система автоматического пуска, находящая применение в настоящее время на большинстве реакторов, работает по измерению одновременно и периода и мощности реактора.
Величина выходного сигнала от измерителя мощности в начале пуска мала и основной составляющей является сигнал от измерителя периода. На вход сравнивающего устройства подается сигнал от задатчика периода. Напряжение на входах задающего устройства произвольно нормируется в вольтах,
соответственно значениям периода и мощности.
Допустим, что схема регулятора настроена так, что сигнал от измерителя мощности появляется, начиная с 1% мощности. Начинаем пуск с некоторого низкого уровня мощности, например 1E-8 от полной мощности. На вход сравнивающего устройства подаем сигнал 10 вольт. Этот сигнал, согласно градуировке входов задатчика, соответствует либо мощности 10%, либо периоду 10 сек. Стержень извлекается под влиянием сигнала ошибки. При этом даже при большой скорости извлечения период реактора в течении довольно большого времени остается больше 10 сек. Но как только период достигает 10 сек, сигнал от измерителя периода сравнивается с сигналом от задатчика, и стержень останавливается или даже их направление движения меняется на обратное. С этим периодом реактор достигает критичности и продолжает разгоняться с тем же периодом еще в течении примерно 4 порядков мощности. Система управления стержнем работает только по данным измерителя периода.
После достижения рабочих мощностей начинает появляться сигнал от измерителя мощности. При этом сигнал от измерителя периода автоматически уменьшается, и разгон реактора продолжается с более длинным периодом. Наконец при достижении 10% мощности суммарный сигнал от измерителя мощности и измерителя периода сравнивается с сигналом задатчика и стержень снова останавливается или колеблется около заданного уровня мощности. Управление движением стержня осуществляется только по сигналу измерителя мощности.
Кроме такого построения системы можно использовать отдельное задание сигналов периода и мощности, так что до выхода на мощность управляющим сигналом является только сигнал измерителя периода, а затем включается измеритель мощности.
2.8 Общие требования к системам аварийной защиты ЯР. Причины аварий, виды аварий ЯР. Виды защитных действий.
Безопасность эксплуатации реактора определяется предупреждением и локализацией выхода продуктов деления за пределы активной зоны. Основной причиной выхода продуктов деления за пределы активной зоны разрушение оболочки топлива. Причинами разрушения оболочки ТВЭЛ-ов являются следующие факторы:
–пережог ТВЭЛ-а, вызванный непредвиденным локальным всплеском мощности,
–ухудшение теплоотвода из-за разрыва трубопровода, отключения насоса,
–ухудшение теплоотвода и изменение мощности хотя и в допустимых пределах, но с большой скоростью.
Поэтому главным требованием при разработке САЗ реактора является: 1.Непрерывный и надежный контроль основных физических и технологических параметров: мощности, периода, расхода, температуры, давления и скорости их изменения. Каждый раз, когда эти параметры достигают установленного уровня, САЗ должна автоматически вызывать определенное защитное действие. Прежде всего, это относится к контролю уровня мощности и его изменения, потому что первая обязанность САЗ – прекратить цепную реакцию деления путем сброса стержней АЗ, т.е. обеспечить ядерную безопасность.
Сохранения активной зоны от разрушения не всегда возможно. Например, при нарушениях теплоотвода активная зона может расплавиться вследствие перегрева от гамма- и бэта-излучения.
2.Контроль уровня мощности и скорости его изменения должны вестись непрерывно во всех режимах работы установки в том числе и при пуске и в глубоко подкритическом состоянии. Все работы на подкритическом реакторе ведутся только при взведенной системе аварийной защиты.
3.При выборе параметров для системы АЗ надо руководствоваться принципом их прямого, а не косвенного, менее надежного, измерения. Например, надежнее измерять расход теплоносителя, а не напряжение питания насосов, хотя напряжение является более быстродействующим сигналом. Но этот сигнал не извещает о разрыве контура охлаждения.
4.Все каналы защиты проектируются при сохранении их работоспособности в крайне тяжёлых условиях (излучение, температура, влажность, вибрация). Питание осуществляется от резервных источников питания. При исчезновении питания САЗ останавливает реактор.
5.Защитные действия системы аварийной защиты могут быть различны. Используются следующие способы предотвращения аварий:
–быстрый сброс стержней; под действием собственного веса стержень АЗ погружается в активную зону средних размеров примерно за 1 секунду, различные механические и пневматические средства уменьшают это время до 0,1 сек, применение пиропатронов сокращает его до 0,01 сек;
–реверс стержней; скорость погружения здесь много меньше, чем при сбросе стержней и осуществляется с помощью автоматического привода;
–быстрый реверс стержней; стержни перемещаются также приводом, но скорость их перемещения в 5-10 раз больше нормальной;
–слив замедлителя; применяется в водо-водяных реакторах;
–отключение нагрузки; используется на энергетических реакторах;
–введение жидкого поглотителя в каналы активной зоны.
6.Обязательно используется звуковая и световая сигнализация; обычно последовательность действий такова:
–превышение мощности на 5 % → сигнализация;
–превышение мощности на 10 % →быстрый реверс;
–превышение мощности на 20 % → аварийный сброс стержней.
7.При проектировании САЗ всегда приходится искать компромисс между безопасностью реактора и бесперебойностью его работы. Безопасность требует срабатывания защиты при любом нарушении режима или отказе оборудования. Бесперебойность работы требует сведения сигналов АЗ к минимуму. Поэтому для каждого конкретного реактора характер и число аварийных сигналов определяются по условиям его эксплуатации.
В зависимости от последствий аварий все параметры ЯЭУ делят на три группы: 1.параметры, отклонение которых от нормы не создает аварийной ситуации на реакторе, они снабжаются предупредительной сигнализацией; 2.параметры, отклонение которых от нормы создает локальные аварии на установке; мощность реактора снижают до допустимого уровня;
3.параметры, отклонение от нормы которых вызывает аварию реактора; мощность быстро снижается за счет сброса стержней и реактор выводится в глубокую подкритику.
Как бы ни была спроектирована система аварийной защиты, два вида аварийных сигналов включаются в нее обязательно: сигнал по превышению уровня мощности и сигнал по скорости изменения мощности (т.е. по периоду разгона).
Виды аварий:
1.катастрофы в результате диверсий, военных действий; 2.аварии, связанные с изменением реактивности за счет эксплуатационных факторов (пусковые и "холодные" аварии);
3.аварии эксплуатационные, но не требующие быстрой остановки реактора (авария разрыва трубопровода теплоносителя).

2.9 Виды аварий ЯР и способы их устранения.
Возможны три типа аварий реакторной установки: 1.катастрофы в результате диверсий, военных действий;
2.аварии, связанные с изменением реактивности за счет эксплуатационных факторов (пусковые и "холодные" аварии); 3.аварии эксплуатационные, но не требующие быстрой остановки реактора (авария
разрыва трубопровода теплоносителя).
Аварии второго типа можно разбить на две группы. К первым относим аварии, в которых отрицательный температурный эффект реактивности является стабилизирующим, ко вторым – аварии, где большой отрицательный Ktc усугубляет опасность. Примером аварии первой группы является пусковая авария, при которой плотность нейтронов растет. Увеличение температуры реактора приводит к снижению реактивности, в этом случае чем больше отрицательный Ktc, тем лучше. Однако имеются аварии, где отрицательный Ktc ухудшает ситуацию. Это так называемые "холодные аварии".
Например, в работающий реактор по какой-то причине начинает поступать свежий теплоноситель более низкой температуры, чем имевшийся в активной зоне. Снижение средней температуры теплоносителя приведет к увеличению реактивности тем больше, чем больше Ktc. Может оказаться, что рост мощности будет настолько быстрым, и плотность такой большой, что реактор нельзя будет предохранить от разрушения. Таким образом большая величина отрицательного Ktc не является надежной защитой от аварий.
Т.о. для конкретного реактора с известным Ktc существует такая область изменения средней температуры активной зоны, при которой система АЗ обеспечит безопасность реактора. Однако с точки зрения пусковой аварии эта величина Ktc может быть недостаточно большой для компенсации роста мощности.
Очевидно, для безопасности установки при авариях обоих типов области допустимых значений Ktc должны перекрываться.
Подобный график убеждает в наличии оптимального температурного коэффициента реактивности для каждого реактора.
С точки зрения автоматического регулирования также существует оптимальный температурный коэффициент. Слишком большой Ktc приводит к излишней колебательности в системе. При слишком малых Ktc реактор имеет плохую переходную характеристику и имеют место колебания, связанные с отравлением.
Наконец, аварии третьей группы относятся к проектным авариям, то есть ответные меры на них заранее предусмотрены в проекте установки. Наиболее опасной при этом считается авария разрыва трубопровода теплоносителя. В
результате обезвоживания активной зоны реактивность быстро растет и спасти от разрушения может только быстрое охлаждение активной зоны внешним теплоносителем. Такое охлаждение обеспечивает система аварийного охлаждения (САОР), которая включает ёмкости с водой и газом под давлением и аппаратуру для сброса воды в коллекторы первого контура. Она рассчитана на охлаждение активной зоны в течение 2 минут после аварии. За это время включаются дизельгенераторы, которые запитывают двигатели задвижек, обеспечивающие охлаждение на неограниченное время.
2.10 Виды систем аварийной защиты. Системы защиты по абсолютному превышению мощности, по относительному превышению, по периоду.
Типы аварийных систем.
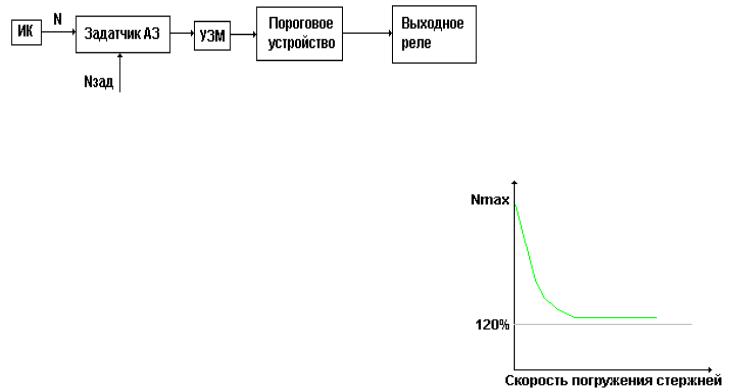
1.Система аварийной защиты по абсолютному превышению мощности. Структурная схема канала защиты по мощности имеет вид:
Сигнал с ионизационной камеры поступает на задатчик аварийной защиты и, если мощность будет выше заданной, то
сигнал передаётся на усилитель защиты по мощности и затем на триггер порогового устройства (преобразование в импульсную форму сигнала необходимо для увеличения быстродействия схемы) и далее на систему реле, размножающих сигнал аварийной защиты до нужного количества параллельных цепей управления.
График показывает, как сильно влияет время запаздывания срабатывания схемы на рост мощности в аварийной ситуации. Предположено, что период реактора стал коротким Т = 0,1 сек. Уровень включения защиты принят 120 %. Видно, что даже при отсутствии запаздывания сигнала в схеме максимальная мощность реактора на момент срабатывания стержней будет значительно больше, чем уровень срабатывания АЗ:
Nmax = K * Nвыкл
Коэффициент пропорциональности зависит от периода реактора, компенсирующей способности стержней, конструкции механизма выключения. Поэтому для ограничения выбросов мощности при включении АЗ желательно снизить время запаздывания сигнала при срабатывании схемы. Причем важно в первый момент быстро уменьшить реактивность реактора. Что касается скорости перемещения стержней, то она является второстепенным фактором, потому что, начиная с некоторого значения скорость перемещения стержней не влияет на величину максимальной мощности.
Из графика видно, что максимальная мощность начинает спадать еще при неподвижных стержнях за счет температурного коэффициента реактивности. По мере увеличения скорости падения стержней АЗ Nmax уменьшается, но затем остается постоянной примерно на уровне срабатывания АЗ независимо от нарастания скорости погружения.
По этой причине применение пиропатронов для ускоренного ввода стержня АЗ в активную зону менее эффективно по сравнению с частичным погружением стержней АЗ. Действительно, если в исходном положении стержни АЗ будут слегка опущены в активную зону, то в начальный момент времени после срабатывания АЗ их эффективность в начале движения будет значительно больше, чем если бы они были полностью извлечены. Это позволяет снизить время срабатывания схем аварийной защиты примерно на 200 микросекунд.
2.Система аварийной защиты по относительному уровню мощности.
В этой системе задатчик проектируется так, чтобы отношение уровня срабатывания к уровню мощности оставалось постоянным при изменении мощности. Это можно сделать, если пропорционально изменению мощности будет меняться и уставка Nзад. Выполнить это условие можно и вручную, и автоматически. Чаще всего движки потенциометров