

330 / ЗаданКурсЖурналПолныйМПУСУ / 1СУ_ИспытШин
.pdfРАЗРАБОТКИ КОНТРОЛЬНО ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ
Автоматизированная система управления стендом для динамических испытаний пневматических шин
Виктор Роженцев, Юрий Прокопенко, Анатолий Новиков, Владимир Мараховский, Александр Шаманин, Андрей Фищиленко
Описана система управления обкаточным стендом для динамических испытаний пневматических шин. Для управления скоростью вращения бегового барабана использован асинхронный следящий электропривод, а для нагружения испытываемой шины применён следящий электрогидравлический привод, что в совокупности обеспечивает высокую точность регулирования заданной скорости вращения бегового барабана и нагрузки на испытываемую шину.
|
ВВЕДЕНИЕ |
такта с поверхностью и, как следствие, |
достаткам используемых стендов, кро |
|||
|
Большое внимание, уделяемое повы |
к увеличению теплообразования и сни |
ме того, следует отнести недостаточ |
|||
|
шению надёжности и качества пневма |
жению срока службы шины. Срок |
ную надёжность устройств передачи |
|||
|
тических шин, продиктовано постоян |
службы шины определяется измерени |
момента от двигателя на ось бегового |
|||
|
но возрастающими требованиями к |
ем пройденного шиной пути до появ |
барабана и отсутствие системы измере |
|||
|
безопасности движения транспортных |
ления критических дефектов или раз |
ния нагрузки на шину, которая опреде |
|||
|
средств, важным элементом ходовой |
рушения. |
|
ляется количеством задействованных |
||
|
части которых они являются. |
Динамические испытания шин в ре |
при испытаниях грузов. В усовершен |
|||
|
Актуальная задача обеспечения тре |
жиме ведомого колеса проводятся на |
ствованных стендах в отличие от более |
|||
|
буемой надёжности пневматических |
специальных обкаточных стендах, ос |
ранних аналогов нагружение |
шины |
||
|
шин может быть решена при использо |
новной составной частью которых яв |
осуществляется силовым гидроцилинд |
|||
|
вании эффективных средств для прове |
ляется беговой барабан, приводимый |
ром, управляемым сервоклапаном, а |
|||
|
дения стендовых натурных испытаний |
в движение электроприводом. В стен |
измерение нагрузки на шину — датчи |
|||
|
шин, в том числе статических [1] и ди |
дах устаревшей конструкции, эксплуа |
ком силы с электрическим выходом. |
|||
|
намических испытаний, обеспечиваю |
тируемых и сегодня на предприятиях |
Применение |
сервогидравлического |
||
|
щих определение таких характеристик |
шинной промышленности, вращение |
привода и электрического способа из |
|||
|
шины, как динамический радиус, срок |
бегового барабана |
осуществляется |
мерения действующей на шину нагруз |
||
|
службы при работе в различных скоро |
электроприводом постоянного тока. |
ки в определённой степени устранило |
|||
|
стных режимах с максимально допус |
Для передачи момента от двигателя на |
недостатки предшествующих стендов, |
|||
|
тимой нагрузкой на шину, сопротивле |
ось бегового барабана в таких стендах |
однако использование сервоклапана |
|||
|
ние шины качению, влияние нагрева |
используются ремённая или зубчатая |
потребовало высокой степени очистки |
|||
|
на эксплуатационные характеристики |
(редуктор) передача, а нагружение ши |
рабочей (гидравлической) жидкости и |
|||
|
шины и др. |
ны осуществляется с помощью меха |
её охлаждения, что, в свою очередь, |
|||
|
Динамический радиус шины опреде |
нических грузов, подвешенных на тро |
привело к усложнению конструкции |
|||
|
ляется как расстояние от оси движуще |
се через рычаг и воздействующих на |
стенда и повышению требований к |
|||
|
гося колеса до опорной поверхности. |
ось обода, на котором смонтирована |
квалификации обслуживающего пер |
|||
|
Величина динамического радиуса не |
испытываемая шина. Реализованный |
сонала. |
|
|
|
|
посредственно влияет на срок службы |
на таких стендах способ нагружения |
В разработанной системе управле |
|||
|
шины, поскольку уменьшение дина |
шины не позволяет изменять величину |
ния стендом для динамических испы |
|||
|
мического радиуса вследствие увеличе |
воздействующей на шину нагрузки в |
таний пневматических шин |
учтены |
||
|
ния нагрузки или снижения давления |
процессе испытания (доступ к стенду |
недостатки предшествующих |
конст |
||
|
воздуха в шине приводит к увеличению |
во время испытаний воспрещён) и осу |
рукций и применены прогрессивные |
|||
|
площади контакта шины с опорной |
ществлять отвод обода, на котором |
технические |
решения, повысившие |
||
36 |
поверхностью, интенсивному трению |
смонтирована шина, |
от поверхности |
эффективность результатов стендовых |
||
в материалах шины и в месте её кон |
барабана после её разрушения. К не |
испытаний шин: |
|
|||
www.cta.ru |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
СТА 1/2009 |
|
|

Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
● для управления скоростью вращения |
|
|
|
|
Таблица 1 |
||||
бегового барабана использован асин |
|
Основные технические характеристики системы управления стендом для динамических |
|||||||
хронный следящий электропривод |
|
испытаний пневматических шин |
|
|
|||||
[2], а для |
повышения надёжности |
|
|
|
|
|
|
||
Количество испытываемых шин |
|
|
2 |
|
|||||
стенда привод бегового барабана вы |
|
|
|
||||||
|
|
|
|
|
|
||||
полнен по прямой схеме, исключаю |
Диаметр испытываемых шин |
|
|
От 300 до 1500 мм |
|||||
щей использование недостаточно |
Максимальная нагрузка на шину |
|
|
100 кН |
|
||||
надёжных промежуточных редуктора |
|
|
|
|
|
|
|||
Количество ступеней программы |
|
|
Не ограничено |
||||||
и ремённой передачи; |
|
|
|
||||||
|
|
|
|
|
|
|
|||
|
Линейная скорость поверхности бегового барабана |
|
От 16 до 170 км/ч |
||||||
● для поддержания заданной нагрузки |
|
||||||||
|
|
|
|
|
|
||||
на испытываемую шину применён |
Погрешность измерения нагрузки на шину: |
|
|
±0,1 кН |
|
||||
следящий |
электрогидравлический |
● в диапазоне от 0 до 5 кН |
|
|
|
||||
● в диапазоне от 5 до 100 кН |
|
|
±2% |
|
|||||
привод, используемый в испытатель |
|
|
|
||||||
Погрешность поддержания заданной нагрузки на шину |
|
±2% |
|
||||||
ных прессах [3], не предъявляющий |
|
|
|||||||
|
|
|
|
|
|
||||
Погрешность измерения линейной скорости поверхности бегового |
|
|
|
||||||
высоких требований к чистоте рабо |
|
±1% |
|
||||||
барабана |
|
|
|
||||||
чей жидкости, питающей силовой |
|
|
|
|
|||||
Погрешность измерения пройденного шиной пути: |
|
|
|
||||||
гидроцилиндр, и не требующий её |
|
|
|
||||||
● от 0 до 10 км |
|
|
±1% |
|
|||||
охлаждения; |
|
|
|
|
|
||||
|
|
● свыше 10 км |
|
|
±0,1% |
|
|||
● для измерения |
динамического |
ра |
|
|
|
|
|
|
|
Погрешность измерения динамического радиуса шины |
|
±1 мм |
|
||||||
диуса шины, скорости её движе |
|
|
|||||||
|
|
|
|
|
|
||||
ния и пройденного шиной пути |
● программное изменение скорости |
бана, а также текущих значений |
|||||||
использованы высокоточные опти |
вращения бегового барабана и нагру |
нагрузок на испытываемые шины, |
|||||||
ко электронные растровые преобра |
зок, воздействующих на испытывае |
динамических |
радиусов |
шин, |
|||||
зователи; |
|
|
|
мые шины; |
пройденного шинами пути (или |
||||
● автоматизация процесса испытания |
● измерение линейной скорости вра |
времени) на каждой ступени и |
|||||||
шины и требуемая надёжность систе |
щения бегового барабана; |
суммарного пути (или времени); |
|||||||
мы управления стендом обеспече |
● измерение нагрузок, воздействую |
● организацию протокола испытаний |
|||||||
ны использованием управляющего |
щих на испытываемые шины; |
и его распечатку; |
|
|
|||||
компьютера в промышленном ис |
● измерение динамических радиусов |
● сохранение результатов испытаний. |
|||||||
полнении. |
|
|
|
испытываемых шин; |
|
|
|
|
|
В настоящей статье рассматривают |
● измерение пройденного шинами пути. |
КРАТКОЕ ОПИСАНИЕ ОБЪЕКТА |
|||||||
ся устройство и технические возмож |
Основные технические характери |
АВТОМАТИЗАЦИИ |
|
||||||
ности автоматизированной системы |
стики реализованной системы приве |
Внешний вид разработанного стенда |
|||||||
управления стендом для динамичес |
дены в табл. 1. |
СО2 100, система управления и изме |
|||||||
ких испытаний пневматических шин, |
Система управления и измерения |
рения которого обеспечивает опреде |
|||||||
обеспечивающей |
определение |
сро |
выполняет: |
ление ранее перечисленных динамиче |
|||||
ка службы шины и его зависимости |
● вывод на экран монитора заданных и |
ских характеристик |
пневматических |
||||||
от скорости движения и нагрузки, воз |
измеренных параметров испытаний, |
шин, показан на рис. 1. |
|
||||||
действующей на испытываемую ши |
в том числе |
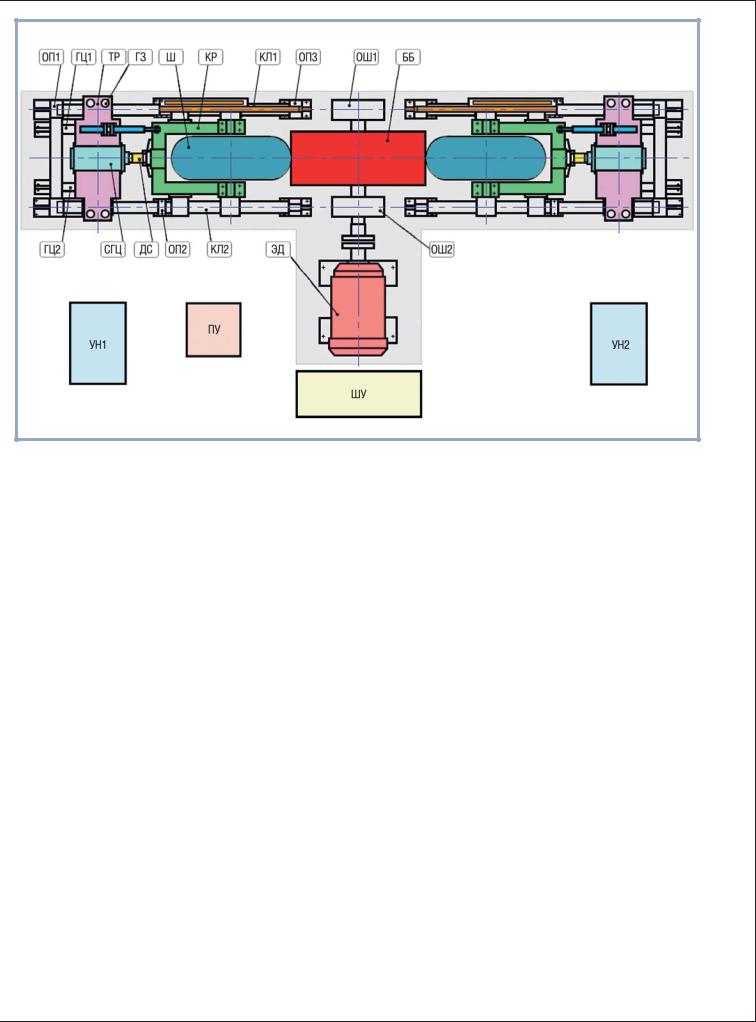
Двухместный испытательный стенд |
|||||||
ну, пути, пройденного шиной до разру |
● |
заданных значений линейной ско |
(рис. 2) конструктивно представляет со |
||||||
шения, и динамического радиуса ши |
|
рости вращения бегового барабана |
бой цилиндрический стальной гладкий |
||||||
ны. Далее по тексту для краткости |
|
и нагрузок, воздействующих на |
беговой барабан ББ диаметром 1700 мм, |
||||||
она называется системой управления и |
|
испытываемые шины, на каждой |
установленный на |
шарикоподшип |
|||||
измерения. |
|
|
|
|
ступени программы, а также ско |
никовых опорах ОШ1 и ОШ2, и два |
|||
Система управления и измере |
|
рости нагружения при переходе на |
идентичных нагружающих устройства, |
||||||
ния разработана в ОАО «СКБИМ» |
|
последующую ступень, |
расположенных симметрично бегово |
||||||
(г. Армавир). |
|
|
|
● |
измеренных значений линейной |
му барабану. Каждое из нагружающих |
|||
|
|
|
|
|
скорости вращения бегового бара |
устройств состоит из траверсы |
ТР и |
||
ТРЕБОВАНИЯ К СИСТЕМЕ |
|
|
|
|
|
|
|
||
И ЕЁ ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
Система управления и измерения стенда должна обеспечивать:
●возможность проведения испытаний одновременно двух шин различных типоразмеров;
●максимальную скорость движения шины в соответствии с условиями испытаний;
●создание нагрузки на шину не менее максимально допустимой для сдвоен
ных колёс; |
Рис. 1. Внешний вид стенда СО2'100 |
37 |
|
|
|
СТА 1/2009 |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
www.cta.ru |
|
|
Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
|
|
|
|
|
|
Условные обозначения: ОП1...ОП3 — первая, вторая и третья опоры; ГЦ1, ГЦ2 — первый и второй |
|
|
|
гидроцилиндры; ТР — траверса; ГЗ — гидравлический зажим; Ш — шина; КР — каретка; КЛ1, |
|
|
|
КЛ2 — первая и вторая колонны; ОШ1, ОШ2 — первая и вторая шарикоподшипниковые опоры; |
|
|
|
ББ — беговой барабан; СГЦ — силовой гидроцилиндр; ДС — датчик силы; ЭД — электродвигатель; |
|
|
|
УН1, УН2 — первая и вторая насосные установки; ПУ — пульт управления; ШУ — шкаф управления. |
|
|
|
Рис. 2. Устройство стенда |
|
|
|
|
|
|
|
каретки КР. На траверсе смонтирован |
создающего нагрузку на испытывае |
|
|
силовой гидроцилиндр СГЦ, траверса |
мую шину. |
|
|
может фиксироваться на колоннах |
Управление двигателем ЭД, вращаю |
|
|
КЛ1 и КЛ2, закреплённых в опорах |
щим барабан ББ, обеспечивают час |
|
|
ОП1…ОП3 с помощью четырёх гидрав |
тотный регулятор и пускорегулирую |
|
|
лических зажимов ГЗ. Каретка служит |
щая аппаратура, расположенные в |
|
|
для закрепления на ней испытываемой |
шкафу управления ШУ, а для управле |
|
|
шины Ш. Траверса и каретка жёстко |
ния нагружением шины и измерения |
|
|
связаны между собой через датчик силы |
её характеристик служат управляю |
|
|
ДС, их перемещение по колоннам обес |
щий компьютер и измерительно регу |
|
|
печивают рабочие гидроцилиндры ГЦ1 |
лирующая аппаратура, размещённые в |
|
|
и ГЦ2. После перемещения каретки |
пульте управления ПУ. |
|
|
до соприкосновения шины с поверх |
|
|
|
ностью бегового барабана нагружение |
ОПИСАНИЕ |
|
|
шины осуществляется гидроцилиндром |
ФУНКЦИОНИРОВАНИЯ |
|
|
СГЦ при фиксированном положении |
СИСТЕМЫ |
|
|
траверсы на колоннах. Величина прик |
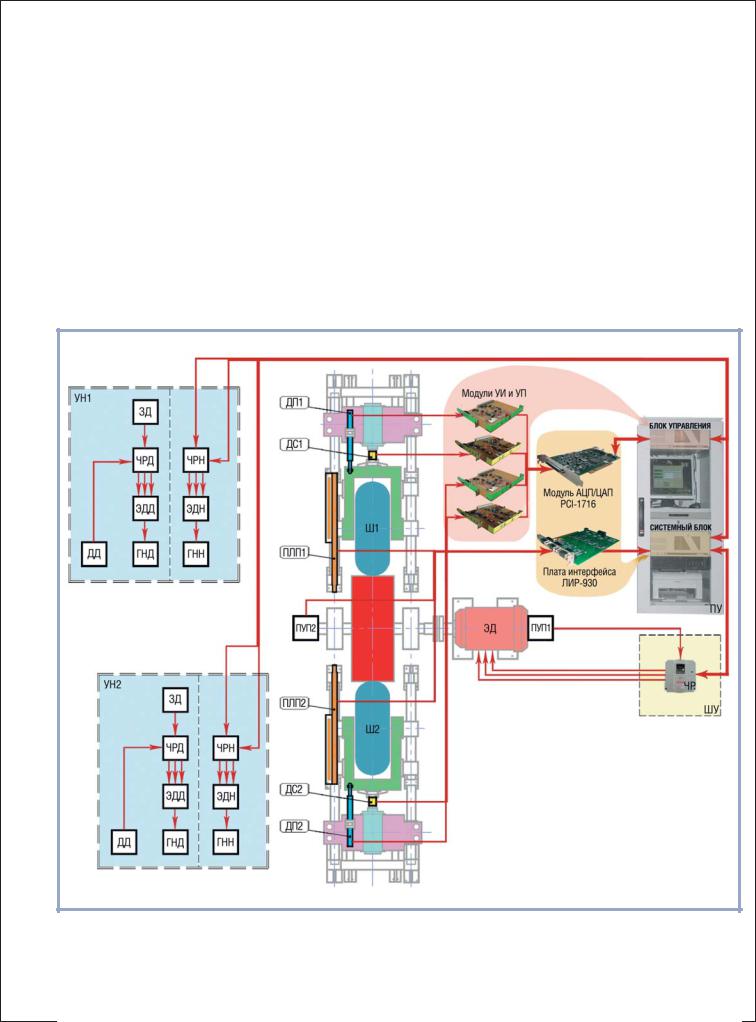
Структурная схема стенда, на кото |
|
|
ладываемой к шине нагрузки измеряет |
рой показаны состав аппаратуры сис |
|
|
ся датчиком силы ДС. |
темы управления и измерения, а также |
|
|
Для питания рабочей жидкостью |
исполнительные устройства и функ |
|
|
гидроагрегатов стенда служат насос |
ционально важные элементы конст |
|
|
ные установки УН1 и УН2. Каждая из |
рукции, приведена на рис. 3. |
|
|
них имеет две раздельные гидромаги |
Разработанная система структурно |
|
|
страли: одна обеспечивает постоянное |
состоит из четырёх основных частей: |
|
|
высокое давление для управления гид |
системы управления беговым бараба |
|
|
розажимами ГЗ, а другая создаёт пере |
ном, двух попарно идентичных сис |
38 |
|
менное рабочее давление для управле |
тем управления нагружением шин и |
|
ния плунжером гидроцилиндра СГЦ, |
фиксацией траверс нагружающих уст |
|
|
|
|
|
ройств стенда и двухканальной систе мы измерения динамических характе ристик испытываемых шин. Все эти системы управления построены с ис пользованием асинхронного частотно управляемого привода, однако заслу живают раздельного рассмотрения в связи с некоторыми отличиями, опре деляемыми их функциональным на значением.
Система управления беговым бараба ном (СУББ) предназначена для автома тического управления приводом двига теля ЭД, вращающего беговой барабан, путём изменения скорости его враще ния и обеспечивает плавный пуск, ос танов и работу двигателя с заданной скоростью вращения.
СУББ является автономной систе мой, её аппаратура размещена в шкафу управления ШУ. Дистанционное уп равление СУББ осуществляется с компьютера пульта управления (ПУ) стендом. СУББ выполнена на базе час тотного регулятора ЧР, который имеет в своём составе энкодер, поддержива ющий вход квадратурных сигналов по собственному интерфейсу. На задаю щий вход регулятора в дистанционном режиме поступает сигнал задания с компьютера, управляющего работой стенда. На вход обратной связи регуля тора подаётся квадратурный сигнал с преобразователя угловых перемеще ний ПУП1, расположенного на валу
www.cta.ru |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
СТА 1/2009 |
|
|
Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
двигателя ЭД. Сравнение сигналов за дания и обратной связи осуществляет ся в регуляторе после соответствующей обработки сигнала обратной связи ин терфейсным блоком регулятора ЧР. Отклонение между реальным значени ем сигнала обратной связи и заданным значением управляющего сигнала пре образуется ПИД регулятором, входя щим в состав регулятора ЧР, в сигнал задания частоты для приводного двига теля ЭД, статорные обмотки которого подключены к регулирующим выходам регулятора. Наличие у регулятора ЧР функции ПИД регулирования обеспе чивает высокую точность поддержа ния заданной скорости вращения дви гателя ЭД и, соответственно, бегового барабана.
Система управления нагружением шины представляет собой замкнутую систему автоматического регулирова ния, обеспечивающую поддержание приложенной к шинам Ш1 и Ш2 на грузки [4].
Частотные регуляторы ЧРН управля ют работой двигателей ЭДН, нагру женных гидравлическими насосами ГНН высокого давления, рабочая жид кость от которых поступает в рабочую полость силовых гидроцилиндров обо их нагружающих устройств стенда. На задающие входы регуляторов ЧРН по ступают сигналы, пропорциональные величине заданной нагрузки, сформи рованные управляющим компьютером и преобразованные ЦАП, а на входы обратных связей — усиленные и про
масштабированные усилителями УИ сигналы датчиков силы ДС.
ПИД регуляторы, входящие в состав регуляторов ЧРН, осуществляют авто матическое поддержание приложен ной к шинам нагрузки.
Система управления фиксацией тра верс обеспечивает надёжную фикса цию траверс нагружающих устройств на колоннах в процессе испытания шин. Системами управления насосных установок УН1 и УН2 поддерживается неизменным высокое давление рабо чей жидкости в гидромагистралях [5], питающих гидравлические зажимы. Каждая из систем управления образо вана электрическим задатчиком давле ния ЗД и частотным регулятором ЧРД, на задающий вход которого подаётся
Условные обозначения: УН1, УН2 — первая и вторая насосные установки; ДД — датчик давления; ЗД — задатчик давления; ЧР, ЧРД, ЧРН — частотные регуляторы; ЭД, ЭДД, ЭДН — асинхронные электродвигатели; ГНД, ГНН — гидравлические насосы; ДП1, ДП2 — первый и второй датчики перемещения; ДС1, ДС2 — первый и второй датчики силы; ПЛП1, ПЛП2 — первый и второй преобразователи линейных перемещений; ПУП1, ПУП2 — первый и второй преобразователи угловых перемещений; Ш1, Ш2 — первая и вторая шины; модули УИ и УП — модули усилителей и усилителей@преобразователей сигналов; ПУ — пульт управления; ШУ — шкаф управления.
Рис. 3. Структурная схема стенда |
39 |
СТА 1/2009 |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
www.cta.ru |
|
|

|
Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы |
|
|
|
||
|
сигнал задатчика ЗД, а на вход обрат |
телями угловых (ПУП2) и линейных |
ния информации с каналов измерения |
|||
|
ной связи — сигнал датчика давления |
(ПЛП1 и ПЛП2) перемещений после |
нагрузки и перемещения плунжеров |
|||
|
ДД, расположенного в гидромагистра |
преобразования их выходных сигналов |
силовых гидроцилиндров нагружаю |
|||
|
ли высокого давления. Электродвига |
платой интерфейса ЛИР 930 и соответ |
щих устройств стенда и для формиро |
|||
|
тели ЭДД, статорные обмотки которых |
ствующей обработки системным бло |
вания разностных сигналов, управляю |
|||
|
подключены к регулирующим выходам |
ком компьютера. |
|
щих электроприводами нагружающих |
||
|
регуляторов ЧРД, управляют работой |
Взаимодействие описанных систем в |
устройств. |
|||
|
гидравлических насосов ГНД, вследст |
рамках |
общей системы управления |
Для привода бегового барабана при |
||
|
вие чего давление в гидромагистралях, |
стендом |
позволяет автоматически по |
менён асинхронный двигатель специ |
||
|
питающих рабочей жидкостью гидрав |
заданной программе реализовать сле |
ального назначения типа АИР 355 МИ |
|||
|
лические зажимы, фиксирующие тра |
дующие функции: |
|
БУ 2460 мощностью 310 кВт с прину |
||
|
версы нагружающих устройств, под |
● обнуление преобразователей ПЛП1 |
дительным воздушным охлаждением |
|||
|
держивается постоянным. |
и ПЛП2 и установку штоков датчи |
от независимого вентилятора, управ |
|||
|
Для управления перемещением тра |
ков ДП1 и ДП2 в исходное положе |
ляемый частотным регулятором типа |
|||
|
верс и кареток нагружающих устройств |
ние (эта операция осуществляется с |
КЕВ.30.F5.M1W 900А производства |
|||
|
стенда в установочном режиме работы |
помощью не показанных на рис. 3 |
фирмы KEB. Частотный регулятор, |
|||
|
служат два переносных пульта дистан |
гидрораспределителей с электриче |
сетевые дроссели 27.DR.B28 1041 и |
|||
|
ционного управления (на рис. 3 не |
ским управлением, которые подклю |
тормозной резистор 30.BR.226 6163 про |
|||
|
показаны). С их помощью в ручном |
чают соответствующие полости си |
изводства этой же фирмы, а также пуско |
|||
|
режиме осуществляется перемещение |
ловых |
и рабочих гидроцилиндров |
вая аппаратура размещены в трёхсек |
||
|
траверс в требуемое положение (в зави |
обоих нагружающих устройств к гид |
ционном шкафу (1900×2800×700 мм). |
|||
|
симости от типоразмера испытывае |
ромагистралям высокого давления, в |
Датчиком обратной связи служит рас |
|||
|
мых шин), их фиксация и расфикса |
результате чего траверсы нагружаю |
тровый преобразователь угловых пере |
|||
|
ция, а также управление положением |
щих устройств и плунжеры силовых |
мещений типа ЛИР 158А (2500 перио |
|||
|
плунжеров силовых гидроцилиндров, |
гидроцилиндров занимают свои ис |
дов выходного напряжения на обо |
|||
|
перемещающих каретки с закреплён |
ходные положения, соответствую |
рот), расположенный на валу двигателя |
|||
|
ными на них шинами в положение до |
щие испытаниям шин максимально |
привода бегового барабана. Управле |
|||
|
соприкосновения шин с поверхностью |
го типоразмера); |
|
ние скоростью вращения бегового бара |
||
|
бегового барабана. Для управления |
● плавный разгон двигателя ЭД до за |
бана в дистанционном режиме рабо |
|||
|
перемещением плунжеров каждого из |
данной скорости; |
|
ты, в том числе по программе, осущест |
||
|
силовых гидроцилиндров СГЦ исполь |
● нагружение шин Ш1 и Ш2 до задан |
вляется подачей на задающий вход |
|||
|
зуются частотные регуляторы ЧРН |
ной величины нагрузки по линейно |
частотного регулятора по каналу RS 485 |
|||
|
насосных установок УН1 и УН2. При |
му закону с заданной скоростью воз |
|
|
||
|
этом на их задающие входы подают |
растания нагрузки; |
|
|
|
|
|
ся сигналы, пропорциональные требу |
● изменение величины нагрузки на |
|
|
||
|
емому перемещению плунжеров сило |
шины Ш1 и Ш2 и скорости их дви |
|
|
||
|
вых гидроцилиндров, а на входы об |
жения в процессе проведения испы |
|
|
||
|
ратных связей — усиленные усилите |
таний; |
|
|
|
|
|
лями преобразователями УП выход |
● измерение динамических характери |
|
|
||
|
ные сигналы датчиков перемещения |
стик испытываемых шин; |
|
|
|
|
|
ДП1 и ДП2 (на рис. 3 эти связи не |
● защиту стенда в соответствии с таки |
|
|
||
|
показаны). |
ми параметрами, как минимальный |
|
|
||
|
Двухканальная система измерения |
динамический радиус и максималь |
|
|
||
|
осуществляет измерение действующих |
ная нагрузка на испытываемые ши |
|
|
||
|
на испытываемые шины нагрузок, |
ны (при срабатывании любой из за |
|
|
||
|
пройденного ими пути и динамических |
щит производится отвод |
каретки |
|
|
|
|
радиусов шин. |
нагружающего устройства от бего |
|
|
||
|
Действующие в процессе испытания |
вого барабана). |
|
|
|
|
|
нагрузки на шины Ш1 и Ш2 измеряют |
|
|
|
|
|
|
ся датчиками силы ДС1 и ДС2, выход |
АППАРАТНЫЕ СРЕДСТВА |
|
|
|
|
|
ные сигналы которых после усиления и |
Описываемая система управления и |
|
|
||
|
масштабирования усилителями УИ и |
измерения динамических характери |
|
|
||
|
преобразования АЦП поступают в сис |
стик пневматических шин построена |
|
|
||
|
темный блок компьютера. Питание |
на базе одноплатного промышленно |
|
|
||
|
датчиков ДС и ДП обеспечивают ис |
го компьютера РСА 6184 производ |
|
|
||
|
точники питания, расположенные на |
ства фирмы Advantech, размещённого |
|
|
||
|
платах усилителей сигналов датчиков |
в корпусе IPC 610 этой же фирмы. |
|
|
||
|
(соответственно на платах УИ и УП). |
В корпусе компьютера также размеще |
|
|
||
|
Измерение скорости движения ис |
ны многофункциональный |
модуль |
|
|
|
|
пытываемых шин, пройденного ими |
PCI 1716 (Advantech), имеющий 16 ка |
|
|
||
40 |
пути и динамического радиуса произ |
нальный АЦП и два ЦАП, используе |
|
|
||
водится соответственно преобразова |
мые соответственно для преобразова |
Рис. 4. Пульт управления |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
СТА 1/2009 |
|
|

Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
|
ется второй растровый преобразова |
мы Octagon Systems с модулями ввода |
|
|
тель угловых перемещений ЛИР 158А |
вывода Opto 22, предназначенные для |
|
|
(600 периодов выходного напряжения |
гальванической |
изоляции силовой |
|
на оборот), а для измерения динамиче |
автоматики стенда и цифровых портов |
|
|
ского радиуса испытываемых шин — |
ввода вывода компьютера, установ |
|
|
растровые преобразователи линейных |
лены на задней панели пульта управ |
|
|
перемещений ЛИР 7 (преобразуемое |
ления. |
|
|
перемещение до 820 мм). Обработку |
Аппаратные средства системы управ |
|
|
сигналов всех трёх преобразователей |
ления и измерения расположены в |
|
|
перемещения обеспечивает плата ин |
шкафу PROLINE (1400×600×600 мм) |
|
|
терфейса ЛИР 930, имеющая три |
производства фирмы Schroff (рис. 4). |
|
|
независимых канала измерения с че |
Аппаратура систем управления на |
|
|
тырёхкратной интерполяцией. Плата |
гружением шин и фиксацией траверс |
|
|
интерфейса установлена в слот ISA |
нагружающих устройств стенда, вклю |
|
|
корпуса промышленного компьютера. |
чающая частотные регуляторы, управ |
|
|
Аналоговая часть системы управле |
ляющие работой двигателей гидро |
|
|
ния и измерения образована датчика |
насосов, размещена в блоках, располо |
|
|
ми силы и перемещения плунжеров |
женных непосредственно на насосных |
|
|
силовых гидроцилиндров соответст |
установках (рис. 5). |
|
|
венно тензометрического и трансфор |
|
|
|
маторного типов и их масштабирую |
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ |
|
|
щими усилителями. Усилители объеди |
Программное |
обеспечение систе |
|
нены пассивной кросс платой, на ко |
мы разработано в среде Borland C++ |
|
|
торой дополнительно расположены |
Builder и работает под управлением |
|
|
источники питания ±15 В производст |
OC Windows XP. |
|
Рис. 5. Насосная установка |
ва фирмы Interpoint, а сама кросс |
Взаимодействие управляющей про |
|
|
плата размещена в корпусе IPС 610, |
граммы с аппаратной частью системы |
|
соответствующего сигнала с управляю |
аналогичном корпусу используемого |
осуществляется |
с использованием |
щего компьютера. |
в системе промышленного компьюте |
драйверов в виде пакета библиотек ди |
|
Для измерения пройденного шинами |
ра. Два блока оптронных развязок на |
намической компоновки DLL фирмы |
|
пути и скорости их движения использу |
базе платы МРВ 16 производства фир |
Advantech. |
|
41
СТА 1/2009 |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
www.cta.ru |
|
|

|
|
Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы |
|
|
|
|||
|
|
Работу программы с растровыми |
● управляет нагружающими устройст |
скорости нагружения при выходе на |
||||
|
|
преобразователями перемещения обес |
вами в установочном режиме работы; |
очередную ступень программы, изме |
||||
|
|
печивает оригинальный драйвер, соз |
● формирует программы |
испытания |
нение нагружения на разгружение и |
|||
|
|
данный в процессе разработки систе |
шин в автоматическом режиме для |
наоборот, работа с панелью «Измере |
||||
|
|
мы управления стендом для стати |
каждого из каналов нагружения; |
ние», а также обнуление каналов изме |
||||
|
|
ческих испытаний |
пневматических |
● формирует протоколы |
испытания |
рения нагрузки и динамического ра |
||
|
|
шин [1]. |
|
шин; |
|
|
|
диуса, выбор параметра управления |
|
|
Программа управления работает па |
● управляет нагружающими устройст |
(нагрузка или перемещение), работа с |
||||
|
|
раллельно по двум потокам: один уп |
вами при проведении калибровки |
панелью «Размеры шины» и др. Кроме |
||||
|
|
равляет аппаратурой системы, другой |
системы; |
|
|
|
того, режим «Установка» обеспечивает |
|
|
|
реализует интерфейс пользователя. |
● осуществляет автоматический оста |
проведение калибровки системы. Для |
||||
|
|
Поток управления аппаратурой про |
нов испытания и отвод испытывае |
обоих каналов возможен переход из |
||||
|
|
изводит: |
|
мых шин при срабатывании защиты |
режима «Установка» в подрежим «Пуск |
|||
|
|
● считывание информации с кана |
с выдачей информации о причинах |
в установке» и в режим работы «Про |
||||
|
|
лов измерения нагрузки и переме |
останова и одновременным включе |
грамма». Переход из подрежима «Пуск |
||||
|
|
щения; |
|
нием звукового сигнала (сирены). |
в установке» допускается только в под |
|||
|
|
● предварительную обработку и накоп |
Главное окно системы управления и |
режим «Стоп в установке», а переход |
||||
|
|
ление измерительной информации; |
измерения в режиме задания парамет |
из режима «Программа» — только в |
||||
|
|
● формирование управляющих сигна |
ров испытания шин и контроля вос |
режим «Конец испытания». При пере |
||||
|
|
лов для каждого из каналов нагру |
производимых |
стендом |
параметров |
ходе в подрежим «Стоп в программе» |
||
|
|
жения; |
|
испытания приведено на рис. 6. |
выполняется разгружение испытывае |
|||
|
|
● формирование управляющих сигна |
Программное |
обеспечение преду |
мой шины и отвод каретки от барабана. |
|||
|
|
лов для бегового барабана; |
сматривает для каждого из каналов 1 и |
Режим «Конец испытания» использу |
||||
|
|
● управление работой насосных уста |
2 (каналов испытания каждой из двух |
ется для обработки результатов испы |
||||
|
|
новок и контроль их характеристик; |
параллельно испытываемых шин) три |
тания, их сохранения и распечатки |
||||
|
|
● определение динамических радиу |
основных режима работы: «Установ |
протокола испытаний. |
||||
|
|
сов шин и контроль за их измене |
ка», «Программа» и «Конец испыта |
Для канала «Привод барабана» в под |
||||
|
|
ниями; |
|
ния», а для канала «Привод бараба |
режиме «Пуск в установке» допускает |
|||
|
|
● выдачу управляющих сигналов на |
на» — два основных режима: «Установ |
ся выполнение следующих операций: |
||||
|
|
исполнительные устройства при сра |
ка» и «Программа». |
|
|
задание скорости и времени разгона |
||
|
|
батывании защиты. |
|
В режиме «Установка» для каналов |
(торможения), увеличение (уменьше |
|||
|
|
Работу, связанную |
с интерфейсом |
1 и 2 осуществляется подготовка стен |
ние) скорости и времени разгона (тор |
|||
|
|
пользователя, выполняет основное |
да к проведению испытаний. В этом |
можения), работа с панелью «Измере |
||||
|
|
приложение: |
|
режиме возможно выполнение следую |
ние», а также редактирование програм |
|||
|
|
● формирует и отображает основные |
щих операций: |
задание |
величины |
мы испытания. Переход из подрежима |
||
|
|
панели системы; |
|
нагрузки, увеличение (уменьшение) |
«Пуск в установке» возможен только |
|||
|
|
|
|
|
|
|
|
в подрежим «Стоп в установке», а из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подрежима «Пуск в программе» — толь |
|
|
|
|
|
|
|
|
ко в подрежим «Стоп в программе». |
|
|
|
|
|
|
|
|
ВМЕСТО ЗАКЛЮЧЕНИЯ |
|
|
|
|
|
|
|
|
Описанная в статье система управле |
|
|
|
|
|
|
|
|
ния и измерения совместно со стендом |
|
|
|
|
|
|
|
|
представляет собой достаточно слож |
|
|
|
|
|
|
|
|
ный и дорогостоящий испытательный |
|
|
|
|
|
|
|
|
комплекс, вводу в эксплуатацию кото |
|
|
|
|
|
|
|
|
рого предшествовал большой объём |
|
|
|
|
|
|
|
|
подготовительных работ на месте его |
|
|
|
|
|
|
|
|
установки у заказчика (ОАО «ОМСК |
|
|
|
|
|
|
|
|
ШИНА»). |
|
|
|
|
|
|
|
|
Сложность организации испытаний |
|
|
|
|
|
|
|
|
системы в целом в условиях, сущест |
|
|
|
|
|
|
|
|
вующих у разработчика из за отсутст |
|
|
|
|
|
|
|
|
вия требуемого фундамента и ограни |
|
|
|
|
|
|
|
|
чений по подведённой мощности элек |
|
|
|
|
|
|
|
|
троэнергии, явилась причиной прове |
|
|
|
|
|
|
|
|
дения испытаний стенда по частям. |
|
|
|
|
|
|
|
|
Поэтому проверка функционирования |
|
|
|
|
|
|
|
|
нагружающих устройств стенда, пер |
|
|
|
|
|
|
|
|
вичная калибровка и метрологическая |
|
|
|
|
|
|
|
|
|
|
|
|
проверка каналов измерения нагруз |
|||||
42 |
|
Рис. 6. Главное окно системы управления в режиме задания параметров испытания шин |
|
|||||
|
и контроля их воспроизведения стендом |
|
|
|
|
ки, динамического радиуса, переме |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
СТА 1/2009 |
|
|
Р А З Р А Б О Т К И /К О Н Т Р О Л Ь Н О 4И З М Е Р И Т Е Л Ь Н Ы Е С И С Т Е М Ы
щения плунжеров силовых гидроци |
проведении динамических испытаний |
ную эксплуатацию, и до настоящего |
|
линдров стенда и систем управления |
пневматических шин потребовали уда |
времени серьёзных отказов в работе |
|
ими проводились в ОАО «СКБИМ», |
ления пульта управления стендом (ра |
системы не наблюдалось. ● |
|
а работоспособность системы управле |
бочего места испытателя) на расстоя |
|
|
ния электроприводом бегового бара |
ние более 30 метров, что сказалось на |
ЛИТЕРАТУРА |
|
бана — у соисполнителя (ООО «ВЭМЗ |
общих сроках выполнения подготови |
1. Прокопенко Ю., Роженцев В., Марахов |
|
СПЕКТР», г. Владимир). Динамиче |
тельных работ. В итоге комплекс под |
ский В., Шаманин А. Автоматизирован |
|
ская балансировка бегового барабана |
готовительных и пусконаладочных ра |
ная система для определения статических |
|
была проведена заводом изготовите |
бот занял около шести месяцев. При |
характеристик |
пневматических шин // |
лем барабана. |
этом сам стенд, насосные установки и |
Современные |
технологии автоматиза |
После поставки заказчику полного |
шкаф с аппаратурой управления элек |
ции. – 2008. – № 1. – С. 28 34. |
|
комплекта оборудования, входящего в |
троприводом бегового барабана были |
2. Стенд для динамических испытаний |
|
состав стенда, предстояло выполнить |
расположены на первом этаже испыта |
пневматических шин: пат. 64369 Россий |
|
большой объём работ, связанных с |
тельной лаборатории, а рабочее место |
ская Федерация/ Прокопенко Ю.Д., Ро |
|
подготовкой фундамента, размещени |
испытателя было вынесено на второй |
женцев В.С., Мараховский В.И. и др. ; |
|
ем узлов стенда, монтажом силовых и |
этаж, что удалило его на безопасное |
опубл. 2007, Бюл. № 18. |
|
сигнальных кабелей и согласованием |
расстояние от источника потенциаль |
3. Прокопенко Ю.Д., Кастанов А.С., Ро |
|
аппаратных и программных средств |
ной опасности, которую представляют |
женцев В.С. Испытательные прессы но |
|
системы в целом. Наиболее тру |
во время проведения испытаний как |
вого поколения // ПРИБОРЫ + автома |
|
доёмкие работы, связанные с подго |
сам стенд, так и испытываемые на |
тизация. – 2006. – № 5. – С. 14 16. |
|
товкой и заливкой фундамента, а так |
нём шины. |
4. Машина для механических испытаний |
|
же монтаж силовых кабелей от источ |
Проведённые приёмо сдаточные ис |
материалов: пат. 48066 Российская Феде |
|
ника электроэнергии до местораспо |
пытания и калибровка системы в |
рация/ Прокопенко Ю.Д., Кастанов А.С., |
|
ложения стенда проводились силами |
составе стенда подтвердили правиль |
Роженцев В.С. и др. ; опубл. 2005, Бюл. |
|
заказчика. Значительная мощность, |
ность принятых схемных, конструк |
№ 25. |
|
потребляемая электроприводом бего |
тивных и алгоритмических реше |
5. Насосная установка: пат. 51224 Россий |
|
вого барабана, привела к тому, что |
ний, обеспечивших функционирова |
ская Федерация/ Прокопенко Ю.Д., Кас |
|
подключение его к источнику электро |
ние стенда с заданными техническими |
танов А.С., Роженцев В.С. и др. ; опубл. |
|
энергии пришлось осуществлять непо |
и метрологическими характеристика |
2006, Бюл. № 03. |
|
средственно на электроподстанции, а |
ми. В ноябре 2007 года стенд СО2 100 |
|
|
требования техники безопасности при |
был принят заказчиком в промышлен |
E mail: prokopenko777@mail.ru |
|
43
Реклама
СТА 1/2009 |
© 2009, CTA Тел.: (495) 234-0635 |
Факс: (495) 232-1653 http://www.cta.ru |
www.cta.ru |
|
|