

330 / ЗаданКурсЖурналПолныйМПУСУ / 2БалансировкаРотора
.pdfРАЗРАБОТКИ
МАШИНОСТРОЕНИЕ
Автоматизированная система балансировки роторов
|
|
Дмитрий Егоров, Любовь Глазырина, Петр Жиганов, Александр Ключников, |
||||
|
|
Александр Пелевин |
|
|
|
|
|
|
|
|
|||
|
|
В статье описывается автоматизированная система для выполнения работ |
||||
|
|
по динамической балансировке роторов на вертикальном балансировочном стенде |
||||
|
|
с газостатическими подшипниками. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
ВВЕДЕНИЕ |
стей коррекции. Для устранения дейст |
нижняя измерительные опоры. Опоры |
|||
|
Современная техника предъявляет |
вия нагрузок от массы тела баланси |
представляют собой плоскопараллель |
|||
|
всё возрастающие требования к точно |
ровка ротора выполняется при верти |
ные подвески, к упругим пластинам |
|||
|
сти балансировки и определению мас |
кальном положении оси вращения. |
которых крепятся соответственно |
|||
|
со центровочных и инерционных ха |
Использование газостатических под |
верхний и нижний конические газо |
|||
|
рактеристик (МЦИХ) жёстких меж |
шипников обеспечивает отсутствие |
статические подшипники. Нижняя |
|||
|
опорных роторов, в частности, главных |
механического контакта между поверх |
опора с помощью механизма регули |
|||
|
моментов инерции, смещения центра |
ностью ротора и поверхностями под |
ровки радиальных зазоров имеет воз |
|||
|
масс, угла отклонения главной про |
шипников и исключает износ поверх |
можность продольного (вдоль оси ро |
|||
|
дольной центральной оси инерции ро |
ности ротора в процессе его баланси |
тора) перемещения. Установочные ба |
|||
|
тора от оси вращения и других. |
ровки (что может быть полезно, напри |
зы подшипников соответствуют уста |
|||
|
Мерой неуравновешенности тела яв |
мер, при балансировке роторов лета |
новочным базам ротора. Подшипники |
|||
|
ляется дисбаланс — векторная величи |
тельных аппаратов и в ряде других от |
оборудованы пневматическими приво |
|||
|
на, равная произведению неуравнове |
ветственных приложений). |
дами для разгона и торможения рото |
|||
|
шенной массы на ее эксцентриситет. |
|
|
ра, воздух в которые от пневмосети по |
||
|
Дисбаланс полностью определяется |
ОБЪЕКТ БАЛАНСИРОВКИ |
сле очистки и осушки поступает через |
|||
|
значением и углом в системе коорди |
Объект представляет собой тело вра |
электромагнитные пневмораспредели |
|||
|
нат, связанной с осью ротора. Процесс |
щения (жёсткий ротор) с двумя плос |
тели (клапаны), входящие в состав |
|||
|
определения значения и угла дисба |
костями коррекции. В каждой плоско |
ПРС стенда. |
|||
|
ланса ротора и уменьшения их величин |
сти имеются равномерно расположен |
В упругих подвесках каждого из под |
|||
|
корректировкой масс называют балан |
ные по окружности резьбовые отвер |
шипников установлены включенные |
|||
|
сировкой ротора. При статической ба |
стия, угловые положения которых из |
по дифференциальной схеме датчики |
|||
|
лансировке определяют и уменьшают |
вестны и связаны с системой коорди |
силы, измеряющие реакции опор на |
|||
|
главный вектор дисбалансов обычно в |
нат ротора, для установки контроль |
проявления динамической неуравно |
|||
|
одной плоскости. Статическую неурав |
ных и балансировочных грузов. |
вешенности ротора при его вращении. |
|||
|
новешенность можно определить без |
|
|
На рис. 1 показаны только датчики |
||
|
вращения ротора с помощью силы тя |
ОПИСАНИЕ КОНСТРУКЦИИ |
верхнего подшипника, датчики в под |
|||
|
жести. При этом статическая баланси |
СТЕНДА |
|
весках нижнего подшипника установ |
||
|
ровка не позволяет выявить и устра |
Работы по динамической баланси |
лены аналогично. |
|||
|
нить динамическую неуравновешен |
ровке роторов и определению их |
Для определения частоты вращения |
|||
|
ность ротора [1]. |
МЦИХ выполняются на вертикальном |
ротора используется световодный фото |
|||
|
Однако в процессе эксплуатации для |
низкочастотном |
балансировочном |
датчик. Светоотражающее зеркало на |
||
|
функционирования ротора с заданной |
стенде с «жесткими» измерительными |
цилиндрической части боковой поверх |
|||
|
точностью его ось вращения должна |
опорами в виде двух конических газо |
ности ротора с помощью клея закрепля |
|||
|
совпадать с его главной продольной |
статических подшипников. Стенд так |
ется на уровне свободного торца свето |
|||
|
центральной осью инерции. Решение |
же оборудован пневмо распредели |
вода, и его угловое положение однознач |
|||
|
этой задачи может быть выполнено |
тельной системой (ПРС), предназна |
но связано с системой координат ротора. |
|||
|
только методом моментного уравнове |
ченной для очистки воздуха и стабили |
|
|
||
|
шивания ротора после его сборки. Ди |
зации его давления. |
|
ЗАДАЧИ, РЕШАЕМЫЕ |
||
|
намическая балансировка уменьшает |
Конструктивно |
балансировочный |
АВТОМАТИЗИРОВАННОЙ |
||
|
как главный вектор, так и момент дис |
стенд (рис. 1) выполнен в виде массив |
СИСТЕМОЙ |
|||
48 |
балансов ротора. Она требует враще |
ного фундамента, |
на вертикальной |
Автоматизированная система кон |
||
ния ротора и обязательно двух плоско |
стойке которого закреплены верхняя и |
троля и управления (СКУ) процессом |
||||
|
|
|
|
|
|
|
|
www.cta.ru |
|
|
СТА 4/2001 |
||
© 2001, CTA Тел.: (095) 234 0635 Факс: (095) 232 1653 http://www.cta.ru
Р А З Р А Б О Т К И / М А Ш И Н О С Т Р О Е Н И Е
Светоотражающее зеркало |
|
|
A |
Вид A |
|
|
||||||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Световод |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Датчик силы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Верхняя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измерительная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
опора |
|
|
Ротор |
|
|
|
|
Верхний |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
и нижний |
|
|
|
|
|
|
|
||||||
Вертикальная |
|
|
|
|
|
|
|
|
|
конические |
|
|
|
|
|
|
|
|||
стойка |
|
|
|
|
|
|
|
|
|
газостатические |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
подшипники |
|
|
|
|
|
|
|
|||
Нижняя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
измерительная |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
опора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механизм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
регулировки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
радиальных |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Датчик силы |
|
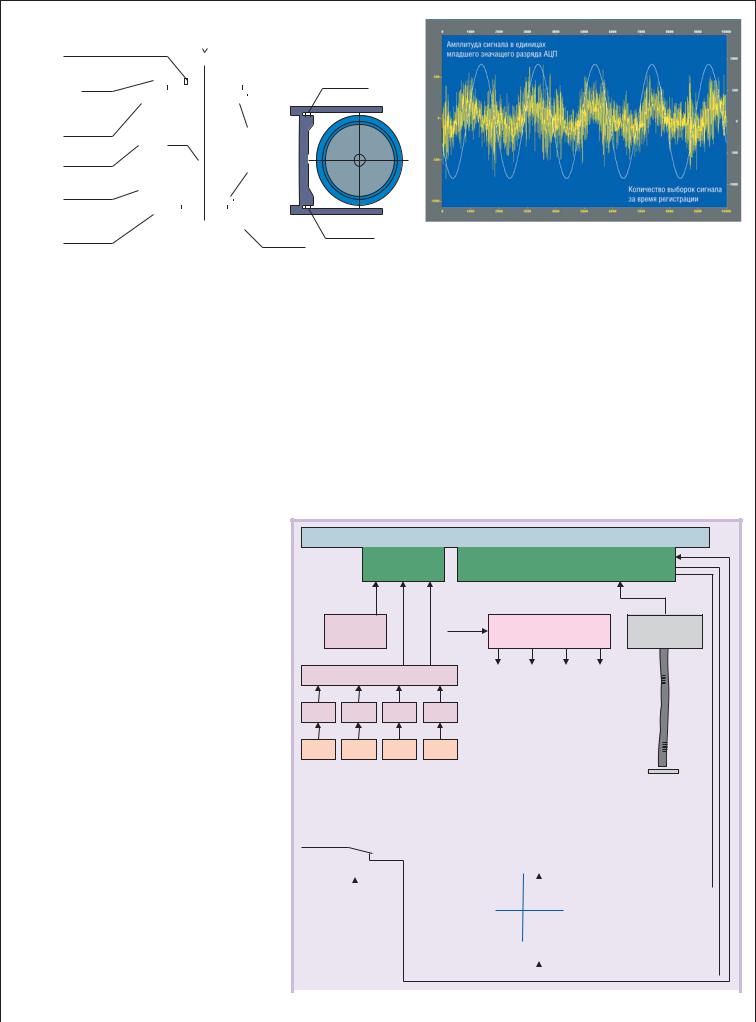
Рис. 2. Вид типового сигнала с датчика силы (жёлтый цвет) |
|
зазоров |
|
|
|
|
|
|
|
|
|
|
|
|
Фундамент |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и того же сигнала после усиления, фильтрации и цифровой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 1. Конструкция балансировочного стенда |
|
|
|
обработки (белый цвет) |
||||||||||||||||
балансировки роторов создана на базе |
● модуль дискретного ввода вывода |
питающими напряжениями посто |
|||||||
персонального компьютера и модулей |
PCL 725 для управления клапанами |
янного тока +5, +12, –12 и +24 В фо |
|||||||
аналогового и дискретного ввода вы |
разгона, торможения и ввода сигна |
тодатчика, устройства связи, а также |
|||||||
вода производства фирмы Advantech. |
лов от фотодатчика и аварийного ре |
клапанов и реле давления. Питание |
|||||||
СКУ предназначена для |
ле давления; |
|
|
тактового генератора осуществляет |
|||||
● контроля сетевого давления воздуха |
● модуль ввода аналоговых сигналов |
ся |
непосредственно |
от |
модуля |
||||
на входе в ПРС с помощью реле дав |
PCL 818L, один из счетчиков тайме |
PCL 818L; |
|
|
|||||
ления; |
ров которого используется также для |
● программное обеспечение. |
|
||||||
● управления исполнительными меха |
счета количества импульсов, посту |
Модули PCL 725 и PCL 818L произ |
|||||||
низмами (клапанами); |
пающих на его вход от тактового ге |
водятся фирмой Advantech, источник |
|||||||
● измерения скорости вращения ротора; |
нератора за время одного полного |
питания NFS80 — фирмой Artesyn |
|||||||
● ввода аналоговых сигналов от датчи |
оборота ротора; |
|
Technologies; датчики силы АС20 и уси |
||||||
ков силы; |
● источник питания |
NFS80 7602K, |
лители АВ02 также являются покупны |
||||||
● выделения полезной информации из |
предназначенный для обеспечения |
ми изделиями. |
|
|
|||||
смеси сигнала и помехи, вызываемой |
|
|
|
|
|
|
|
|
|
в основном движениями воздуха, |
|
|
|
Шина ISA системного блока ПК |
|
|
|
||
электромагнитными наводками, не |
|
|
АЦП |
Плата дискретного ввода вывода |
|
|
|||
равномерностью воздушных зазоров |
|
|
PCL 818L |
|
PCL 725 |
|
|
|
|
и другими причинами (на рис. 2 по |
|
|
|
|
|
|
|
|
|
казаны типовой сигнал, снимаемый |
|
|
|
|
|
|
|
|
|
с датчика силы при вращении ротора |
|
Тактовый |
|
~220 В |
ИВЭП |
Фотодатчик |
|
||
в подшипниках стенда, и тот же сиг |
|
|
|
||||||
|
генератор |
|
|
NFS80*7602K |
|
||||
|
|
|
|
|
|
||||
нал после его усиления, фильтрации |
|
|
|
|
|
|
|
|
|
и цифровой обработки); |
|
Устройство связи |
+5 В |
+12 В |
–12 В |
+24 В |
|
|
|
● определения значений и углов дис |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
балансов в системе координат, свя |
|
|
|
|
|
|
|
|
|
занной с осью ротора; |
АВ02 |
АВ02 |
АВ02 |
АВ02 |
|
|
Световод |
|
|
● расчета массы и мест установки ба |
|
|
|
|
|
|
|
|
|
лансировочных грузов в плоскостях |
АС20 |
АС20 |
АС20 |
АС20 |
|
|
|
|
|
коррекции ротора. |
|
Датчики силы |
|
|
|
Зеркало |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
СТРУКТУРНАЯ СХЕМА СКУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СКУ представляет собой одноуров |
|
|
Реле |
|
|
|
|
|
|
Блок |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Верхний |
|
|
|
|
|
||||||
невую систему на базе IBM PC совмес |
|
|
давления |
|
|
|
|
|
очистки |
|
|
|
|
|
|
|
||||||
+24 В |
|
|
|
|
|
|
|
|
|
воздуха |
|
|
|
подшипник |
|
|
|
|
|
|||
тимого персонального компьютера. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Структурная схема системы показана |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механизм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Клапан «Разгон» |
||||||||||
на рис. 3. Система содержит: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
раскрутки |
|
|
|
|
|
● датчики силы АС20 с блоками согла |
|
Сжатый |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
воздух |
|
|
|
|
|
|
|
|
|
Блок |
|
|
|
|
|
|
|
|
|
||
сования аналоговых сигналов (уси |
|
|
|
|
|
|
|
|
|
|
|
|
Нижний |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
очистки |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
подшипник |
|
|
|
|
|
|||||
лителями) АВ02; |
|
|
|
|
|
|
|
|
|
|
|
воздуха |
|
|
|
|
|
|
|
|||
● двухканальное устройство связи с из |
К пневмосети |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Механизм |
|
|
|
|
|
|||||||
мерительными усилителями и фильт |
|
|
|
|
|
|
|
|
|
|
|
|
Клапан «Тормоз» |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
торможения |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
рами низких частот в каждом канале; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
● световодный фотодатчик; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
● тактовый генератор с частотой 10 кГц; |
Рис. 3. Структурная схема системы |
49 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТА 4/2001 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
||||
© 2001, CTA Тел.: (095) 234 0635 Факс: (095) 232 1653 http://www.cta.ru

|
Р А З Р А Б О Т К И / М А Ш И Н О С Т Р О Е Н И Е |
|
|
|
|
|
|||
|
Модули PCL 725 и PCL 818L |
|
|
|
|
висит от частоты вращения ро |
|||
|
|
|
|
|
|||||
|
установлены в системном блоке |
|
|
|
|
тора. Поэтому при каждом пус |
|||
|
компьютера. Фотодатчик, |
со |
|
|
|
|
ке запись сигналов от датчиков |
||
|
держащий в своем составе гене |
|
|
|
|
силы проводится в процессе |
|||
|
ратор инфракрасного излуче |
|
|
|
|
выбега ротора на постоянной |
|||
|
ния, световод и фотоприемник, |
|
|
|
|
частоте вращения. |
|||
|
выполнен в |
виде отдельного |
|
|
|
|
После регистрации сигналов |
||
|
блока. Для прохождения по све |
|
|
|
|
начального |
неизвестного дис |
||
|
товоду прямого и отраженного |
|
|
|
|
баланса ротора выполняются |
|||
|
пучков света стеклянные волок |
|
|
|
|
несколько дополнительных пу |
|||
|
на на одном конце световода |
|
|
|
|
сков для определения баланси |
|||
|
разделены на два отдельных све |
|
|
|
|
ровочной |
чувствительности |
||
|
товода, закрепленных в корпусе |
|
|
|
|
стенда по массе и углу в верх |
|||
|
фотодатчика. Тактовый генера |
|
|
|
|
ней и нижней плоскостях кор |
|||
|
тор, устройство связи, усилите |
|
|
|
|
рекции ротора. Для этого кон |
|||
|
|
|
|
|
|||||
|
ли, а также источник питания |
Рис. 4. Вид экрана оператора после регистрации вибросигналов |
трольные грузы известной мас |
||||||
|
смонтированы в металлическом |
|
|
|
|
сы устанавливаются в соответ |
|||
|
корпусе, |
имеющем |
габариты |
МЕТОДИКА БАЛАНСИРОВКИ |
ствующие известным углам резьбовые |
||||
|
270× 270× 85 мм и расположенном ря |
РОТОРА |
отверстия обеих плоскостей коррек |
||||||
|
дом с системным блоком компьютера |
После подачи в газостатические под |
ции. В каждом пуске после усиления и |
||||||
|
на рабочем месте оператора. |
|
|
шипники рабочего давления воздуха и |
фильтрации, выполняемой с целью ус |
||||
|
|
|
|
|
установки ротора на рабочие поверх |
транения шума производственного ха |
|||
|
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ |
ности подшипников с воздушным за |
рактера, сигналы оцифровываются и |
||||||
|
В процессе функционирования сис |
зором выполняется регулировка этих |
регистрируются в памяти компьютера |
||||||
|
темы участвует оператор. Для удобства |
зазоров между ротором и рабочими по |
в течение заданного времени. Начало |
||||||
|
восприятия информация о процессе |
верхностями подшипников перемеще |
регистрации осуществляется по сигна |
||||||
|
балансировки ротора представляется |
нием нижнего подшипника вдоль оси |
лу от фотодатчика при достижении ро |
||||||
|
графически в виде нескольких кадров, |
ротора. В программу вводятся началь |
тором заданной частоты вращения. На |
||||||
|
позволяющих оператору вводить на |
ные данные, необходимые для после |
рис. 4 показан вид экрана оператора с |
||||||
|
чальные данные, управлять исполни |
дующих расчетов МЦИХ ротора (масса |
графиками сигналов по окончании их |
||||||
|
тельными механизмами, корректиро |
ротора, массы балансировочных грузов |
регистрации: красный цвет соответст |
||||||
|
вать диапазоны измерения АЦП, про |
и элементов крепления, радиусы уста |
вует сигналу от датчиков, установлен |
||||||
|
сматривать промежуточные результаты |
новки грузов в плоскостях коррекции и |
ных в верхней измерительной плоско |
||||||
|
измерений, а также содержащих сред |
др.). |
сти, зеленый — сигналу от датчиков в |
||||||
|
ства визуализации процессов раскрут |
Пуск ротора включает в себя следую |
нижней измерительной плоскости; по |
||||||
|
ки и торможения ротора, регистрации |
щие фазы: разгон, свободное вращение |
оси абсцисс отложено время регистра |
||||||
|
сигналов от датчиков силы. |
|
|
под действием сил инерции и сил тре |
ции в секундах, по оси ординат — амп |
||||
|
Пилотная версия функционального |
ния (выбег), регистрация сигналов от |
литуда сигналов в единицах младшего |
||||||
|
программного обеспечения СКУ напи |
датчиков силы, установленных в верх |
значащего разряда АЦП. Спектр типо |
||||||
|
сана на языке Pascal и исполняется под |
ней и нижней измерительных плоско |
вого регистрируемого сигнала приве |
||||||
|
управлением |
операционной системы |
стях стенда, торможение до полного |
ден на рис. 5. |
|
||||
|
Windows NT. Программа контролирует |
останова ротора. |
Как видно из рис. 4 и 5, зарегистри |
||||||
|
рабочее давление воздуха и частоту |
При неизменности в процессе балан |
рованные процессы изменения силы в |
||||||
|
вращения ротора, обеспечивает рас |
сировки давления сжатого воздуха, а |
опорах |
подшипников представляют |
|||||
|
крутку и торможение ротора, ввод, ци |
также таких параметров ротора и опор, |
собой сумму нескольких гармоничес |
||||||
|
фровую обработку и графическое пред |
как расстояния от плоскостей коррек |
ких составляющих. Кроме дисбалан |
||||||
|
ставление данных в режимах реального |
ции до опор, массы, жесткости и т.п., |
сов, вибрации на кратных частотах мо |
||||||
|
времени и их накопление на жестком |
балансировочная чувствительность за |
гут вызывать несоосность подшипни |
||||||
|
диске, определяет значения и |
|
|
|
|
ков, овальность ротора в плос |
|||
|
углы дисбалансов в двух плоско |
|
|
|
|
костях подшипников и другие |
|||
|
стях измерения, выводит на мо |
|
|
|
|
причины. |
|
||
|
нитор промежуточные результа |
|
|
|
|
Дальнейшая обработка сиг |
|||
|
ты измерения и обработки сиг |
|
|
|
|
налов с применением цифро |
|||
|
налов, рассчитывает массы и |
|
|
|
|
вой фильтрации производится с |
|||
|
места установки балансировоч |
|
|
|
|
целью выделения гармоничес |
|||
|
ных грузов в двух плоскостях |
|
|
|
|
ких составляющих зарегистри |
|||
|
коррекции, рассчитывает вели |
|
|
|
|
рованных сигналов с частотой, |
|||
|
чину смещения центра масс ро |
|
|
|
|
равной частоте вращения рото |
|||
|
тора и угол отклонения главной |
|
|
|
|
ра (рис. 2), то есть чувствитель |
|||
|
продольной |
центральной |
оси |
|
|
|
|
ных к дисбалансу ротора. По |
|
50 |
инерции, печатает протокол ба |
|
|
|
|
значениям амплитуды этих гар |
|||
лансировки ротора. |
|
Рис. 5. Спектр зарегистрированного вибросигнала |
|
|
монических |
составляющих и |
|||
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
|
|
|
|
|
|
|
СТА 4/2001 |
© 2001, CTA Тел.: (095) 234 0635 Факс: (095) 232 1653 http://www.cta.ru

Р А З Р А Б О Т К И / М А Ш И Н О С Т Р О Е Н И Е
значениям углов, при которых достига ются первые максимумы, определяют ся значения и углы дисбалансов в верх ней и нижней плоскостях коррекции.
Векторно исключив влияние сигна лов начального дисбаланса ротора из суммарных сигналов дисбалансов, заре гистрированных после установки кон трольных грузов в плоскостях коррек ции, можно вычислить коэффициенты балансировочной чувствительности си стемы. Затем, используя полученные коэффициенты, по ранее зарегистриро ванным сигналам начального неизвест ного дисбаланса ротора определяются значения и углы начального дисбаланса ротора в плоскостях коррекции.
После расчета начального дисбалан са ротора и определения массы и мест установки балансировочных грузов вы полняется контрольный цикл раскрут ки ротора с грузами, установленными в плоскостях коррекции, для определе ния остаточного дисбаланса и величи ны смещения центра масс относитель но оси ротора, а также его углового по ложения в связанной с ротором систе ме координат. Если значения парамет ров МЦИХ находятся в пределах допу ска, то процесс балансировки заверша ется, в противном случае рассчитыва ются и устанавливаются дополнитель ные балансировочные грузы и повто ряется контрольный цикл раскрутки ротора.
Система завершает свою работу вы пуском итогового протокола, содержа щего информацию о МЦИХ ротора до и после балансировки на стенде.
НАДёЖНОСТЬ И ТОЧНОСТЬ
РЕЗУЛЬТАТОВ
Надежность результатов балансиров ки обеспечивается следующими мера ми:
●при работе системы регистрируется информация в течение нескольких оборотов ротора;
●относительное изменение частоты вращения ротора за время съёма ин формации не превышает 0,4% (обес печивается автоматический кон троль изменения частоты враще ния);
●производится исключение внешних шумов при определении параметров дисбалансов;
●автоматически реализуются начало регистрации сигналов в каждом цик ле раскрутки и измерения по дости жении в процессе выбега ротора за данной частоты вращения;
После изготовления ротора балансировка
на стенде с газостатическими подшипниками
обеспечит полную сохранность его
поверхности
●подбор оптимального диапазона из мерения АЦП каждого канала осу ществляется по командам оператора с консоли.
Для моделирования процесса балан сировки и отработки методики исполь зовался контрольный ротор с извест ным начальным дисбалансом. На этапе предварительной наладки удалось уменьшить величину суммарного на чального дисбаланса за четыре итера ции в 18 20 раз, при этом смещение центра масс ротора относительно оси вращения не превышало 0,005 мм и от клонение главной продольной цент ральной оси инерции от оси вращения ротора было меньше 30 угловых секунд.
ЗАКЛЮЧЕНИЕ
Проведенные работы подтвердили эффективность применяемого метода и оборудования для низкочастотной балансировки роторов с повышенны ми эксплуатационными требования ми, предъявляемыми к качеству их по верхности. В настоящее время прово дится подготовка к метрологической аттестации стенда и вводу системы в опытную эксплуатацию.
Эффект от внедрения системы заклю чается в повышении точности опреде ления массо центровочных и инерци онных характеристик ротора в 2 3 раза по сравнению с устройствами, исполь зующими метод крутильных колебаний, в сокращении капитальных затрат на изготовление технологической оснаст ки, а также в повышении производи тельности процесса балансировки. ●
ЛИТЕРАТУРА
1. Левит М.Е., Рыженков В.Н. Баланси ровка деталей и узлов. — М.: Машино строение, 1985. — 248 с.
Авторы — сотрудники РФЯЦ ВНИИТФ им. акад. Е.И. Забабахина Факс: (351 72) 326 25
СТА 4/2001
53
www.cta.ru
© 2001, CTA Тел.: (095) 234 0635 Факс: (095) 232 1653 http://www.cta.ru