

330 / ЗаданКурсЖурналПолныйМПУСУ / АлгоритмыМнтерпДвижПриводов
.pdfРАЗРАБОТКИ НАУЧНЫЕ ИССЛЕДОВАНИЯ
Программно аппаратный комплекс для исследования алгоритмов интерполяции траекторий движения многокоординатных электроприводов
Виктор Букреев, Николай Гусев, Михаил Коваленко
В статье рассматривается реализация однокомпьютерного варианта системы числового программного управления, в основе которого лежит оригинальное программное обеспечение под Windows XP, разработанное в среде Delphi 7 по алгоритмам управления следящими электроприводами, полученным авторами статьи в ходе научных исследований.
|
КОНЦЕПЦИИ ЧИСЛОВОГО |
|
ности микропроцессоров всё большее |
характеристик |
электромеханических |
||||
|
ПРОГРАММНОГО УПРАВЛЕНИЯ |
распространение получает одноком |
систем – минимальной ошибки отра |
||||||
|
ТЕХНОЛОГИЧЕСКИМ |
|
пьютерный (пятый) вариант системы |
ботки заданной траектории движения |
|||||
|
ОБОРУДОВАНИЕМ |
|
|
PCNC 4, особенность которого за |
при максимальном быстродействии и |
||||
|
Разработчики современных систем |
ключается в том, что все задачи |
ограничениях на скорость движения и |
||||||
|
числового программного управления |
управления (геометрическая, логиче |
ускорение. Так, при лазерном раскрое |
||||||
|
(ЧПУ) выделяют 5 основных архитек |
ская, терминальная) решаются про |
определённых |
материалов ошибки |
|||||
|
турных вариантов, которые существу |
граммным путём без какой либо до |
поддержания |
заданной |
контурной |
||||
|
ют на рынке [1]. Первый вариант – |
полнительной аппаратной поддерж |
скорости могут привести к значитель |
||||||
|
это классические |
системы |
CNC |
ки. |
ному оплавлению кромки материала |
||||
|
(Computer Numerical Control). Такие |
|
либо отклонению от заданной глуби |
||||||
|
системы выпускаются фирмами с бо |
ТРЕБОВАНИЯ |
ны резки. |
|
|
|
|||
|
гатой традицией производства высо |
К ПРОГРАММНО АППАРАТНОМУ |
С целью разработки и исследования |
||||||
|
кокачественной собственной микро |
КОМПЛЕКСУ |
перспективных |
алгоритмов управле |
|||||
|
электронной аппаратуры. Однако эти |
Анализ рынка отечественных разра |
ния |
движением |
исполнительных |
||||
|
фирмы под влиянием пользователей |
боток систем класса PCNC показал, |
электроприводов следящих электро |
||||||
|
технологического оборудования, же |
что подавляющее большинство при |
механических |
систем сотрудниками |
|||||
|
лающих иметь гибкий интерфейс опе |
меняемых сервоконтроллеров обычно |
кафедры электропривода и электро |
||||||
|
ратора, предлагают |
модификацию |
выполняется из зарубежных модулей, |
оборудования Томского политехниче |
|||||
|
PCNC 1 (Personal Computer Numerical |
где законы управления движением |
ского |
университета был |
разработан |
||||
|
Control) с персональным компьюте |
прошиты и недоступны пользователю |
программно аппаратный комплекс. В |
||||||
|
ром в качестве терминала (второй ва |
для их модификации. Отечественные |
основе комплекса лежит программно |
||||||
|
риант). Следующим шагом в развитии |
же разработки ограничены лишь дву |
реализованный сервоконтроллер с от |
||||||
|
систем с ЧПУ стала реализация двух |
мя видами интерполяции – линейной |
крытой архитектурой, то есть доступ |
||||||
|
компьютерного варианта PCNC 2 |
и круговой, а также ставшими уже |
ный любому пользователю для изме |
||||||
|
(третий вариант). Несколько позже |
классическими прямоугольным и тра |
нения. Для достижения поставленной |
||||||
|
появились системы PCNC 3, ядро ко |
пецеидальным законами разгона/тор |
цели были определены следующие за |
||||||
|
торых реализовано на отдельной пла |
можения. В ряде случаев, например в |
дачи и требования к программно ап |
||||||
|
те, устанавливаемой в корпусе про |
установках лазерного раскроя листо |
паратному комплексу: |
|
|||||
|
мышленного персонального компью |
вых материалов или гравировки, клас |
● техническая реализация исследова |
||||||
|
тера (четвёртый вариант). С бурным |
сические законы управления следя |
тельского комплекса на основе одно |
||||||
|
развитием микропроцессорной |
тех |
щими электроприводами не позволя |
компьютерного |
варианта системы |
||||
46 ники и повышением производитель |
ют достичь требуемых динамических |
управления; |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
|
|
|
|
|
|
|
СТА 1/2007 |
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я
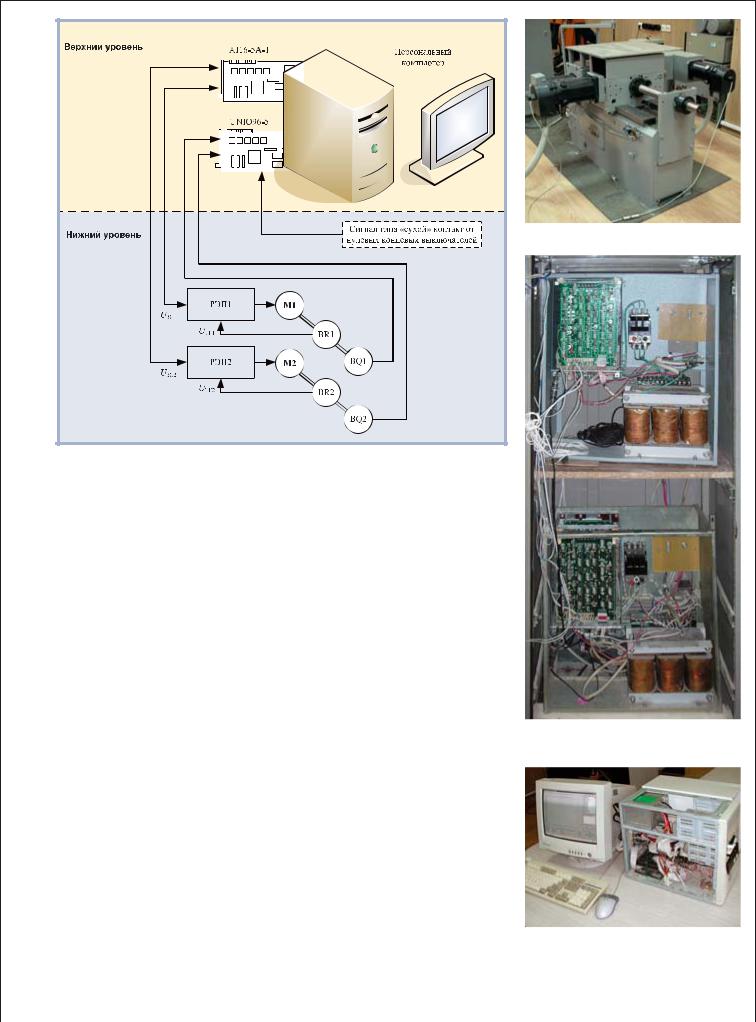
Рис. 2. Двухкоординатный стол
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Условные обозначения: |
|
|
|
|
|
|
|
|
||
|
РЭП1, РЭП2 — регулируемые электроприводы; M1, M2 — электродвигатели; |
|
|
|
|
|
|||||
|
BR1, BR2 — тахогенераторы; BQ1, BQ2 — датчики положения; |
|
|
|
|
|
|
||||
|
UЗС1, UЗС2 — управляющие сигналы для РЭП; UТГ1, UТГ2 — сигналы обратной связи с тахогенераторов. |
|
|
|
|
||||||
|
Рис. 1. Структурная схема системы управления комплексом |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||||
|
● разработка программного обеспече |
нального компьютера со встроенны |
|
|
|
|
|||||
|
ния, реализующего алгоритмы ли |
ми модулями ввода вывода формата |
|
|
|
|
|||||
|
нейной, круговой и сплайн интер |
MicroPC. |
|
|
|
|
|
|
|||
|
поляции, с возможностью дальней |
|
Исполнительным механизмом ис |
|
|
|
|
||||
|
шей доработки другими пользовате |
следовательского комплекса являет |
|
|
|
|
|||||
|
лями; |
ся двухкоординатный стол (рис. 2) с |
|
|
|
|
|||||
|
● программная реализация алгоритмов |
коэффициентами передачи редукто |
|
|
|
|
|||||
|
следящего контура и сигнальной |
ров i по осям X и Y, равными 12 (шаг |
|
|
|
|
|||||
|
адаптации к изменению управляю |
винта tв = 6 мм). Каждую из коорди |
|
|
|
|
|||||
|
щих сигналов; |
нат обслуживает свой электродвига |
|
|
|
|
|||||
|
● обеспечение возможности сопостав |
тель постоянного тока 1ПИ12. В ка |
|
|
|
|
|||||
|
|
|
|
|
|||||||
|
ления результатов эксперимента и |
честве регулируемых электроприво |
|
Рис. 3. Стойка с регулируемыми |
|
||||||
|
моделирования в среде MatLab; |
дов (РЭП1, РЭП2) используются ти |
|
электроприводами «КЕМЕК» |
|
||||||
|
● минимизация стоимости системы |
ристорные |
электроприводы |
«КЕ |
|
|
|
|
|||
|
|
|
|
|
|||||||
|
управления. |
МЕК» (рис. 3). Электропривод тако |
|
|
|
|
|||||
|
Дополнительной задачей, возлагае |
го типа является типичным предста |
|
|
|
|
|||||
|
мой на комплекс, является обеспече |
вителем быстродействующих широ |
|
|
|
|
|||||
|
ние возможности проведения лабора |
корегулируемых приводов с однозон |
|
|
|
|
|||||
|
торных и практических занятий для |
ным регулированием скорости для |
|
|
|
|
|||||
|
некоторых учебных дисциплин элек |
механизмов станков и промышлен |
|
|
|
|
|||||
|
тротехнического направления. |
ных роботов. Диапазон регулирова |
|
|
|
|
|||||
|
|
|
|
ния скорости электропривода со |
|
|
|
|
|||
|
АППАРАТНЫЕ СРЕДСТВА |
ставляет не менее 2000. |
|
|
|
|
|
||||
|
Исследовательский комплекс име |
|
Устройство числового программно |
|
|
|
|
||||
|
|
|
|
|
|
||||||
|
ет двухуровневую структуру (рис. 1). |
го управления выполнено на базе пер |
|
Рис. 4. Рабочее место оператора |
|
||||||
|
Нижний уровень содержит датчики, |
сонального компьютера и двух моду |
|
и устройство числового программного |
|
||||||
|
исполнительный механизм и регули |
лей MicroPC фирмы Fastwel (рис. 4): |
|
управления, выполненное на базе |
|
||||||
|
руемые электроприводы. Верхний |
модуля UNIO96 5 для ввода вывода |
|
персонального компьютера с модулями |
47 |
||||||
|
уровень реализован на базе персо |
дискретных |
данных и модуля |
AI16 |
|
ввода#вывода формата MicroPC |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
СТА 1/2007 |
|
|
|
|
|
www.cta.ru |
|
|||
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5. Интерфейсное окно программы управления следящими |
Рис. 6. Интерфейсное окно программы управления в режиме |
|||||||||||
|
|
электроприводами двухкоординатного стола |
|
|
|
типовых экспериментов |
|
|
|
|
||||
|
|
5A 1 для ввода вывода аналоговой ин |
«X32», реализующей на базе FPGA |
ре положения, коэффициентов циф |
||||||||||
|
|
формации. |
|
|
|
модуля два 32 разрядных счётчика |
рового корректирующего устройст |
|||||||
|
|
Выбор модуля AI16 5A 1 обуслов |
импульсов |
энкодера. Аналогично с |
ва) на координатные и контурные |
|||||||||
|
|
лен в первую очередь наличием в ком |
использованием стандартной про |
ошибки системы; |
||||||||||
|
|
плексе двух аналоговых электропри |
шивки «N04», реализующей форми |
● автонастройка и изменение адресно |
||||||||||
|
|
водов, для управления которыми у |
рователь прерываний по событиям с |
го пространства ввода вывода моду |
||||||||||
|
|
данного модуля есть два канала ЦАП, |
программируемым антидребезгом по |
лей AI16 5A 1 и UNIO96 5. |
||||||||||
|
|
а также |
возможностью |
цифрового |
24 каналам, осуществляется обработ |
Основным недостатком программ |
||||||||
|
|
преобразования в модуле аналоговых |
ка дискретных сигналов от концевых |
ного обеспечения, функционирующе |
||||||||||
|
|
сигналов регулируемого электропри |
выключателей. |
|
го под |
управлением многозадачной |
||||||||
|
|
вода. |
|
|
|
|
|
|
|
|
операционной системы Windows XP, |
|||
|
|
Программируемый |
|
модуль |
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ |
является отсутствие гарантированного |
||||||||
|
|
UNIO96 5 был выбран в силу необхо |
Программное обеспечение верхнего |
срабатывания программы в заданный |
||||||||||
|
|
димости вводить и обрабатывать от |
уровня разработано в среде Delphi 7 и |
момент времени [2]. Поэтому систему |
||||||||||
|
|
личающиеся по формату дискретные |
работает под управлением операцион |
управления, |
использующую такое |
|||||||||
|
|
сигналы от концевых выключателей и |
ной системы Windows XP. Представле |
программное обеспечение, можно с |
||||||||||
|
|
двух датчиков положения. Дискрет |
ние об интерфейсе пользователя раз |
натяжкой назвать лишь системой |
||||||||||
|
|
ные сигналы от нулевых концевых |
работанной программы даёт рис. 5. |
«мягкого» реального времени, то есть |
||||||||||
|
|
выключателей |
двухкоординатного |
Функциональные |
возможности |
системой, иногда допускающей запаз |
||||||||
|
|
стола представляют собой |
сигналы |
программного обеспечения верхнего |
дывание реакции на какое либо |
|||||||||
|
|
типа «сухой» контакт, а выходным |
уровня: |
|
|
|
внешнее воздействие. |
|||||||
|
|
сигналом датчика положения являет |
● создание библиотеки траекторий за |
С учётом описанных особенностей |
||||||||||
|
|
ся последовательность электрических |
данного движения электроприводов; |
аппаратной |
реализации комплекса |
|||||||||
|
|
импульсов прямоугольной |
формы |
● сохранение и отображение результа |
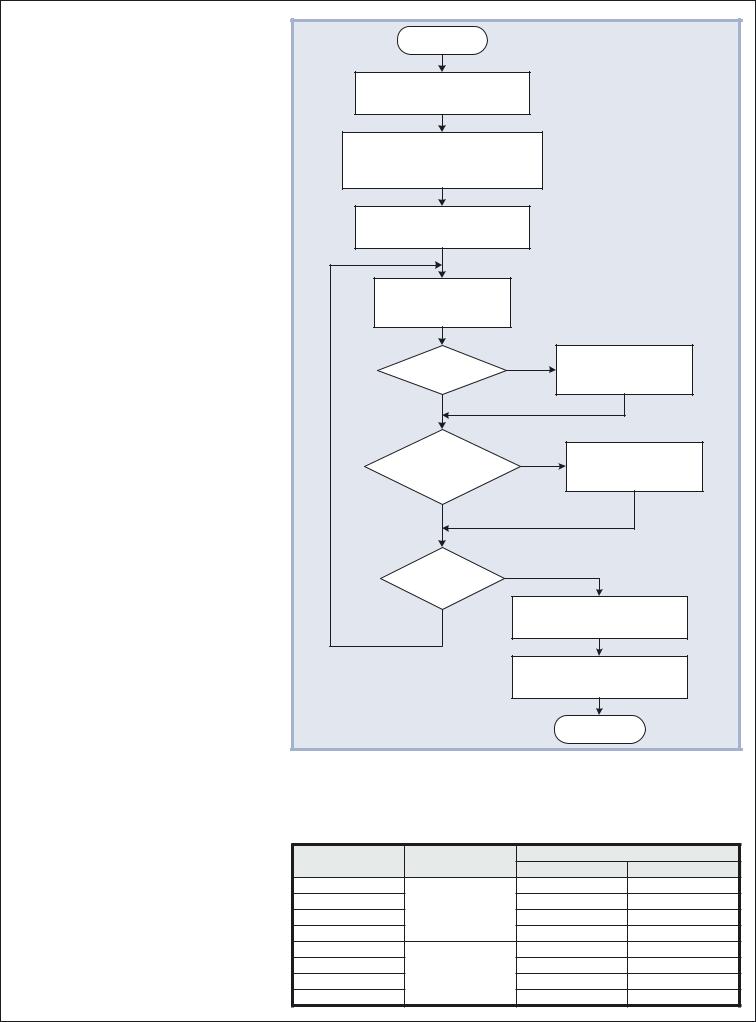
предложен алгоритм главного цикла |
|||||||||
|
|
уровня TTL (в качестве датчиков по |
тов эксперимента (массивов заданий |
программы управления эксперимен |
||||||||||
|
|
ложения применены преобразователи |
и отработки по положению, скоро |
тальной установкой (рис. 7). Для |
||||||||||
|
|
углового перемещения ЛИР 128А |
стей, координатных, контурных и |
обеспечения своевременного форми |
||||||||||
|
|
фирмы СКБ ИС с разрешающей спо |
векторных ошибок, сигналов цифро |
рования задания на РЭП приоритет |
||||||||||
|
|
собностью 2500 импульсов на оборот; |
вой коррекции); |
|
запущенной программы повышен до |
|||||||||
|
|
перемещению |
по каждой |
оси на |
● скачкообразное и линейное измене |
уровня Real Time. Однако нужно |
||||||||
|
|
1 мкм с учётом коэффициента пере |
ние управляющего воздействия в ре |
помнить, что установка приоритета |
||||||||||
|
|
дачи механизма соответствует выход |
жиме |
типовых |
экспериментов |
реального времени в среде Windows |
||||||||
|
|
ная последовательность из 5 импуль |
(рис. 6); |
|
|
|
XP не |
гарантирует своевременного |
||||||
|
|
сов). Применение модуля UNIO96 5 |
● перемещение в пределах рабочей зо |
расчёта |
значений сигнала задания, |
|||||||||
|
|
для обработки сигналов датчиков по |
ны с помощью кнопок управления в |
поэтому предлагается программно пе |
||||||||||
|
|
зволяет снизить нагрузку на цен |
режиме ручного управления; |
рераспределить вычислительные ре |
||||||||||
|
|
тральный |
процессор персонального |
● отображение состояния концевых |
сурсы между процессами расчёта ин |
|||||||||
|
|
компьютера. Так, благодаря исполь |
выключателей и текущей координа |
терполяционного полинома и расчёта |
||||||||||
|
|
зованию |
программируемых |
логиче |
ты; |
|
|
|
значений сигнала цифрового коррек |
|||||
|
|
ских матриц (FPGA) и технологии ISP |
● исследование влияния параметров |
тирующего устройства (ЦКУ). Таким |
||||||||||
|
|
задача подсчёта поступающих им |
цифрового контура положения (ко |
образом, расчёт задания для электро |
||||||||||
|
|
пульсов и определения направления |
эффициентов регуляторов положе |
приводов ведётся с опережением и за |
||||||||||
48 |
|
вращения вала двигателя решается с |
ния по обеим осям, частот квантова |
нимает всё доступное процессорное |
||||||||||
|
помощью |
стандартной |
прошивки |
ния по времени и по уровню в конту |
время, кроме случая обработки пре |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
|
|
|
|
|
|
|
|
|
|
СТА 1/2007 |
|
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
|
|
|
|
|
|
|
Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я |
|
||||
рываний таймера и электроавтомати |
|
|
Начало |
|
|
|
|
|
||||
ки. |
|
|
|
|
|
|
|
|
|
|
|
|
В соответствии с рекомендациями |
|
|
|
|
|
|
|
|
||||
компании Microsoft было решено от |
|
1. Установка приоритета |
|
|
|
|
|
|||||
казаться от стандартных |
таймеров |
|
|
|
|
|
|
|||||
|
Delphi программы Real Time |
|
|
|
|
|
||||||
Delphi и перейти к непосредственно |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
му использованию мультимедийного |
|
|
|
|
|
|
|
|
||||
таймера [3]. Такой подход существен |
|
2. Выделение памяти под объекты, |
|
|
|
|
||||||
но повышает вероятность |
своевре |
|
|
|
|
|
||||||
|
содержащие массивы значений |
|
|
|
|
|||||||
менной выдачи управляющего сигна |
|
|
|
|
|
|||||||
|
задания по положению |
|
|
|
|
|
||||||
ла на регулируемые электроприводы. |
|
|
|
|
|
|
|
|
||||
Оценка работы мультимедийного и |
|
|
|
|
|
|
|
|
||||
программного таймера Delphi с при |
|
3. Запуск мультимедийного |
|
|
|
|
|
|||||
оритетом Real Time приведена в |
|
|
таймера |
|
|
|
|
|
||||
табл. 1. Полученные результаты отра |
|
|
|
|
|
|
|
|
||||
жают тот факт, что даже с установлен |
|
|
|
|
|
|
|
|
||||
ным |
высоким |
приоритетом |
про |
|
|
4. Интерполятор |
|
|
|
|
|
|
граммный таймер не обеспечивает за |
|
|
|
|
|
|
|
|||||
|
|
Расчёт сигнала ЦКУ |
|
|
|
|
|
|||||
данное количество срабатываний тай |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
мера за отведённый промежуток вре |
|
|
|
|
|
|
|
|
||||
мени. Некорректное срабатывание |
|
|
|
Да |
|
|
|
|
||||
таймера, в конечном счёте, приводит |
|
|
5. Прерывание |
|
6. Процедура обработки |
|
||||||
|
|
|
|
|
||||||||
к запаздыванию при формировании |
|
|
таймера |
|
|
прерывания от таймера |
|
|||||
задания для регулируемых |
электро |
|
|
Нет |
|
|
|
|
|
|||
приводов, что обуславливает возник |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
новение рывков скорости и ударов в |
|
|
|
|
|
|
|
|
||||
механической части системы. В ре |
|
|
|
|
Да |
8. Процедура обработки |
|
|||||
зультате возможно искажение траек |
|
|
7. Прерывание от |
|
|
|||||||
|
|
|
|
сигналов |
|
|||||||
тории движения многокоординатного |
|
|
электроавтоматики |
|
|
|
||||||
|
|
|
|
электроавтоматики |
|
|||||||
электропривода и снижение качества |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
обрабатываемого изделия. |
|
|
|
|
Нет |
|
|
|
|
|
||
Экспериментально установлено, что |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
для частоты квантования в контуре по |
|
|
|
|
|
|
|
|
||||
ложения в пределах до 200 Гц работа |
|
|
|
Да |
|
|
|
|
||||
мультимедийного таймера |
позволяет |
|
|
9. Траектория |
|
|
|
|
||||
|
|
|
|
|
|
|
||||||
гарантированно выдавать задание на |
|
|
отработана |
|
|
|
|
|
||||
регулируемые электроприводы |
с за |
|
|
|
10. Восстановление измененного |
|
||||||
данной полосой пропускания. Приме |
|
|
Нет |
|
||||||||
|
|
|
приоритета Delphi программы |
|
||||||||
нение частот квантования в контуре |
|
|
|
|
|
|
|
|
||||
положения свыше 200 Гц в программ |
|
|
|
|
|
|
|
|
||||
но аппаратных системах управления |
|
|
|
|
11. Останов мультимедийного |
|
||||||
данной архитектуры является неоп |
|
|
|
|
|
таймера |
|
|
||||
равданным вследствие значительного |
|
|
|
|
|
|
|
|
||||
влияния на работу таймера таких про |
|
|
|
|
|
|
|
|
||||
цессов, как навигация в меню про |
|
|
|
|
|
Конец |
|
|
||||
граммного обеспечения и вызов дру |
|
|
|
|
|
|
|
|
||||
гих программ. |
|
|
|
Рис. 7. Блок#схема алгоритма главного цикла программы управления экспериментальной |
|
|||||||
Пример работы с мультимедийным |
установкой |
|
|
|
|
|
|
|
||||
таймером и системой приоритетов в |
|
|
|
|
|
|
|
|
||||
Delphi: |
|
|
|
|
|
|
|
|
|
Таблица 1 |
|
|
hProcess:=GetCurrentProcess; |
|
Оценка работы мультимедийного и программного таймера Delphi с приоритетом Real#Time |
|
|||||||||
SetPriorityClass(hProcess, |
REAL |
|
|
|
|
|
Количество срабатываний таймера |
|
||||
TIME_PRIORITY_CLASS); |
|
|
Период таймера, мс |
Интервал измерения, мс |
|
|
|
|||||
|
|
|
Программный таймер |
Мультимедийный таймер |
|
|||||||
MMTimer1:=timeSetEvent(Delay,Res, |
|
|
|
|
|
|||||||
100 |
|
|
|
|
9 |
10 |
|
|||||
@TimerCall,100,TIME_PERIODIC); |
|
|
|
|
|
|
||||||
|
50 |
|
|
|
|
15 |
20 |
|
||||
timeKillEvent(MMTimer1); |
|
|
|
1000 |
|
|
|
|||||
|
|
10 |
|
|
|
62 |
99 |
|
||||
Оператор в первой строке позволяет |
|
|
|
|
|
|||||||
5 |
|
|
|
|
63 |
199 |
|
|||||
получить доступ к запущенному про |
|
|
|
|
|
|||||||
100 |
|
|
|
|
91 |
100 |
|
|||||
цессу. Оператор во второй строке, в |
|
|
|
|
|
|||||||
50 |
|
|
|
|
160 |
200 |
|
|||||
свою очередь, устанавливает указан |
|
10000 |
|
|
|
|||||||
10 |
|
|
|
632 |
1000 |
|
||||||
ному |
процессу |
приоритет |
реального |
|
|
|
|
|
||||
5 |
|
|
|
|
635 |
2000 |
49 |
|||||
времени. В третьей строке показан |
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
СТА 1/2007 |
www.cta.ru |
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
Y, мкм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мкм·10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
Y, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
C |
|
O |
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
X, мкм |
|
|
б |
X, мкм·104 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
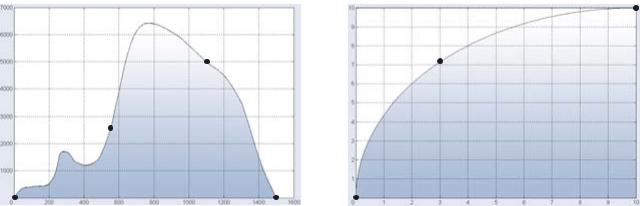
Рис. 8. Примеры графиков заданной и отработанной траекторий на плоскости XY (в обоих примерах – а и б – заданная и отработанная |
|
||||||||||||||||||||
|
|
траектории практически совпадают) |
|
|
|
|
|
||||||||||||||||
|
|
пример вызова функции инициализа |
ся значительное время расчёта вследст |
происходит торможение до заданной |
|||||||||||||||||||
|
|
ции мультимедийного таймера. Ос |
вие наличия двух циклов прогонки |
контурной скорости. Момент начала |
|||||||||||||||||||
|
|
новными |
параметрами |
|
|
являются |
(прямого и обратного), а также гро |
торможения спрогнозирован алгорит |
|||||||||||||||
|
|
Delay – период срабатывания таймера |
моздкость вычислительного алгорит |
мом управления скоростью на участках |
|||||||||||||||||||
|
|
[мс], Res – разрешающая способность |
ма. С целью снижения требований к |
разгона/торможения. Во втором случае |
|||||||||||||||||||
|
|
таймера [мс], TIME_PERIODIC – па |
вычислительным устройствам автора |
(рис. 8 б) траектория была задана дву |
|||||||||||||||||||
|
|
раметр, указывающий, что срабатыва |
ми предложен алгоритм расчёта коэф |
мя сплайнами. Первый участок траек |
|||||||||||||||||||
|
|
ние таймера будут происходить с пе |
фициентов, который не требует нали |
тории, обозначенный точками OA, со |
|||||||||||||||||||
|
|
риодом Delay до тех пор, пока таймер |
чия двух циклов прогонки. Отличи |
держит два интервала – разгон и дви |
|||||||||||||||||||
|
|
не будет остановлен. |
|
|
|
тельной особенностью предлагаемого |
жение с постоянной контурной скоро |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
алгоритма является то, что для умень |
стью. Второй участок – AB содержит |
|||
|
|
АЛГОРИТМИЧЕСКОЕ |
|
|
|
шения времени нахождения коэффи |
также два интервала: интервал движе |
||||||||||||||||
|
|
ОБЕСПЕЧЕНИЕ |
|
|
|
|
|
|
циентов исходная последовательность |
ния с постоянной контурной скоро |
|||||||||||||
|
|
В основе программного обеспече |
точек xn разбивается на интервалы, со |
стью и интервал торможения по пара |
|||||||||||||||||||
|
|
ния комплекса используются разрабо |
держащие по четыре точки. Для каждо |
болическому закону изменения уско |
|||||||||||||||||||
|
|
танные |
авторами |
статьи |
алгоритмы |
го из этих интервалов определяются |
рения во времени. |
||||||||||||||||
|
|
кубической |
|
|
сплайн интерполяции, |
непосредственные значения коэффи |
Ключевым моментом в описанных |
||||||||||||||||
|
|
управления |
положением многокоор |
циентов через выражения, аналитиче |
примерах отработки траекторий дви |
||||||||||||||||||
|
|
динатного электропривода и сигналь |
ски выведенные для каждого коэффи |
жения является проверка не только ра |
|||||||||||||||||||
|
|
ной адаптации следящих систем. |
циента. Выражения для расчёта коэф |
ботоспособности алгоритмов интерпо |
|||||||||||||||||||
|
|
В общем виде кубическим сплай |
фициентов и блок схема алгоритма по |
ляции, но и моментов стыковки раз |
|||||||||||||||||||
|
|
ном, |
интерполирующим на отрезке |
строения сплайн функции приведены |
личных участков разгона/торможения |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
[a,b ] |
данную функцию |
|
|
, называет |
в работе [4]. |
|
|
и перехода с одной контурной скоро |
|||||||||||||
|
|
f (x ) |
|
|
|||||||||||||||||||
|
|
ся функция вида: |
|
|
|
|
|
|
Примеры отработки траекторий дви |
сти на другую (точки O, A, B, C). В от |
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
жения, представленных сплайном, по |
личие от классических алгоритмов, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
казаны на рис. 8. График отработанной |
формирующих законы разгона/тормо |
|||
|
|
g(x ) = gk (x ) = ak + bk (x − xk ) + |
|
|
|||||||||||||||||||
|
|
|
траектории движения на плоскости XY |
жения, где присутствуют скачки скоро |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
+ ck (x − xk )2 + dk (x − xk )3 |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
построен по информации, полученной |
сти, неизбежно приводящие к искаже |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
от дискретных датчиков положения. |
нию траектории движения, в данном |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
при |
x |
|
|
|
|
|
k = 1…n, |
|
|
(1) |
|||||||||||
|
|
|
xk −1, xk , |
|
|
Частота дискретизации данных поло |
случае контурные ошибки уменьшают |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
удовлетворяющая |
совокупности сле |
жения вала двигателя по времени равна |
ся на 12,5%. |
||||||||||||||||||
|
|
дующих условий: |
|
|
|
|
|
|
100 Гц. В первом случае (рис. 8 а) тра |
С целью повышения плавности дви |
|||||||||||||
|
|
а) |
|
|
|
(условие интерполяции в |
ектория была |
сформирована тремя |
жения исполнительного механизма в |
||||||||||||||
|
g (xk ) = fk |
||||||||||||||||||||||
|
|
узлах сплайна); |
|
|
|
|
|
|
сплайнами. На начальном участке тра |
динамических режимах, обусловлен |
|||||||||||||
|
|
б) |
g(x ) C 2 |
|
] |
(двойная непрерывная |
ектории OA производится разгон по |
ных участками разгона или торможе |
|||||||||||||||
|
|
|
|
|
|
|
[ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a, b |
|
|
|
|
|
|
|
|
|
параболическому закону изменения |
ния, предложен алгоритм управления |
|||||
|
|
|
дифференцируемость); |
|
|
|
|||||||||||||||||
|
|
в) |
g ′′(a) = g ′′(b) = 0 |
|
(краевые условия). |
ускорения во времени. По окончании |
контурной скоростью движения, ко |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
разгона оставшийся участок OA траек |
торый учитывает ограничение рывка |
|||
|
|
Для расчёта коэффициентов ak, bk, ck, |
тории отрабатывается с постоянной за |
на интервалах разгона/торможения, |
|||||||||||||||||||
|
|
dk и построения такого сплайна суще |
данной контурной скоростью. Следую |
как показано на рис. 9. Вопросам фор |
|||||||||||||||||||
|
|
ствует несколько методов, например |
щий участок траектории – AB также |
мирования диаграмм управляющего |
|||||||||||||||||||
50 |
|
метод прогонки. Существенными не |
отрабатывается с заданной постоянной |
воздействия в следящем электропри |
|||||||||||||||||||
|
достатками подобных методов являют |
контурной скоростью. На участке BC |
воде (ЭП) посвящено много работ. В |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
www.cta.ru |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СТА 1/2007 |
|||||
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru

|
|
|
|
|
|
|
Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я |
|||||||||||||
V |
|
|
|
|
|
|
|
рощённая структурная схема следяще |
||||||||||||
|
|
|
|
|
|
|
го электропривода с ЦКУ приведена |
|||||||||||||
|
|
Разгон |
Движение с V=const |
Торможение |
|
|||||||||||||||
VK.зад |
|
|
на рис. 10. Введение ЦКУ позволяет |
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
обеспечить сигнальную адаптацию с |
||||||||||||
|
|
V(t) |
|
|
|
|
|
вычислением первой, второй и треть |
||||||||||||
|
|
|
|
|
|
|
ей производных задающего воздейст |
|||||||||||||
|
|
|
|
|
|
|
t |
|||||||||||||
|
|
|
|
|
|
|
вия. Такой |
электропривод является |
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
a |
|
|
|
|
|
|
|
комбинированной следящей систе |
||||||||||||
|
|
|
|
|
|
|
мой, |
|
обеспечивающей |
инвариант |
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
aK.max |
|
a(t) |
|
|
|
|
|
ность относительно задающего воз |
||||||||||||
|
|
|
|
|
|
|
|
действия третьего порядка. Дискрет |
||||||||||||
|
|
|
|
|
|
|
|
ная передаточная функция ЦКУ име |
||||||||||||
|
|
|
|
|
|
|
t |
ет вид: |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
D (z )= α1 (1− z −1)+ α 2 (1− z −1 )2 + |
|
|
|||||||||||
r |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
+ α 3 (1− z −1 )3 . |
|
|
|
|
|
|
|
||||||
|
|
r(t) |
|
|
|
|
|
|
|
|
|
|
|
(2) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 = ta max |
|
|
|
|
t |
Здесь α1, α2, α3 — коэффициенты |
||||||||||||
|
|
|
|
|
|
ЦКУ, определяемые по выражениям |
||||||||||||||
t1 |
|
|
t3 |
|
|
|
|
(4) из условия абсолютной инвариант |
||||||||||||
|
|
|
|
|
|
|
|
ности следящего электропривода от |
||||||||||||
|
|
|
|
|
|
|
|
носительно задающего воздействия: |
||||||||||||
Рис. 9. Кривые изменения контурной скорости (V), ускорения (a) и рывка (r) во времени при |
С0 = С1 = С2 = С3 = 0, |
|
|
|
(3) |
|||||||||||||||
разгоне, движении с постоянной скоростью и торможении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
где С0, С1, С2, С3 — коэффициенты ус |
||||||||||||
|
|
|
|
|
|
|
|
тановившейся ошибки по поло |
||||||||||||
|
|
D(z) |
|
|
|
|
|
жению, скорости, ускорению и рывку |
||||||||||||
|
|
|
|
|
|
|
в дискретные моменты времени. |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
XВХ (z) |
(+) |
X(z) |
(+) |
|
|
XВЫХ (z) |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
WРП (z) |
|
WЭ(p) |
|
WO (p) |
|
α1 |
= |
|
; |
|
|
|
|
|
|
|
|
|
|
|
(–) |
(+) |
T |
|
|
|
|
|
|
K Н T |
|
|
|
|
|
|
|
|
|
|
|
XOC(z) |
|
|
|
|
|
α |
2 |
= 1– A α1 ; |
|
|
|
|
|
|
|
(4) |
||
|
|
|
|
WДП(z) |
|
|
|
|
K H T |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Цифровая часть системы |
|
|
|
|
|
|
|
1– A [α1 + α2 ]– |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
α |
3 |
= |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
B T |
|
|
(8a |
b 2 + M 1)α |
|
|
|
||
Условные обозначения: |
|
|
|
|
|
|
|
|
|
2K |
Н |
1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W (z) — единичная передаточная функция датчика положения; |
|
|
|
– 2B T N 1 T |
2 (1– 2e –a T cos (B T )+ e –2a T ), |
|||||||||||||||
ДП |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
WРП(z) — передаточная функция регулятора положения; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
D(z) — ЦКУ; |
|
|
|
|
|
|
|
где T — период дискретизации в циф |
||||||||||||
WЭ(p) — экстраполятор нулевого порядка; |
|
|
|
|
||||||||||||||||
|
|
|
|
ровом |
контуре |
положения; |
KH = |
|||||||||||||
WО(p) — передаточная функция непрерывной части системы. |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
KM/KC — коэффициент передачи не |
||||||||||||
Рис. 10. Структурная схема следящего электропривода с комбинированным управлением |
прерывной части системы; KM — ко |
|||||||||||||||||||
|
|
|
|
|
|
|
|
эффициент |
|
передачи |
механизма; |
|||||||||
частности, в одной из работ Сабини |
грамма ускорения, вариант в виде сум |
KC —коэффициент обратной связи по |
||||||||||||||||||
на Ю.А. [5], посвящённой формиро |
мы кубической и квадратичной зави |
скорости; T0 = |
TPC T1 ; TPC — посто |
|||||||||||||||||
ванию задающего воздействия, прово |
симости и вариант косинусоидальной |
янная времени интегрирования ПИ |
||||||||||||||||||
дится сравнительная оценка треуголь |
диаграммы. С |
практической |
точки |
регулятора скорости; T1 — постоянная |
||||||||||||||||
ной, параболической, кубической и |
зрения представляет интерес реализа |
времени входного фильтра контура |
||||||||||||||||||
косинусоидальной диаграммы скоро |
ция подобных алгоритмов не только в |
скорости, оптимизирующего реакцию |
||||||||||||||||||
сти электропривода. Критерием опти |
системах класса PCNC, но и в класси |
системы на входное воздействие; a, |
||||||||||||||||||
мальности, определяющим качество |
ческих CNC, поскольку в отечествен |
b — вещественная и мнимая части |
||||||||||||||||||
работы следящей системы, принима |
ных разработках до сих пор отдаётся |
комплексно сопряжённых корней ха |
||||||||||||||||||
ется отсутствие резких изменений ус |
приоритет трапецеидальным диаграм |
рактеристического уравнения, |
полу |
|||||||||||||||||
корения ЭП, которые неизбежно при |
мам скорости при разгоне/торможе |
ченного при преобразовании переда |
||||||||||||||||||
водят к появлению упругих колебаний |
нии. |
|
|
|
точной функции объекта управления |
|||||||||||||||
в механической части системы. Авто |
Программно |
реализованный |
алго |
из непрерывной области в Z область; |
||||||||||||||||
рами было установлено, что выбран |
ритм сигнальной адаптации представ |
A, B, M1, N1 — полиномы, получен |
||||||||||||||||||
ным критериям, помимо диаграмм с |
ляет собой цифровое корректирующее |
ные в результате преобразования пе |
||||||||||||||||||
линейным |
нарастанием |
ускорения |
устройство задающих сигналов для |
редаточной |
|
функции |
системы |
по |
||||||||||||
удовлетворяют параболическая диа |
следящего |
электропривода. |
Уп |
ошибке. |
|
|
|
|
|
|
|
51 |
||||||||
СТА 1/2007 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
www.cta.ru |
||
|
|
|
|
|
|
|
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 |
http://www.cta.ru |
||||||||||||

Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я
Из выражений (2 4) видно, что ко |
|
|
|
|
|
|
|
Таблица 2 |
эффициенты ЦКУ зависят от частоты |
Экспериментальные данные, подтверждающие эффективность введения цифровой |
|||||||
квантования в контуре положения, |
|
|
|
коррекции в контур положения |
|
|||
коэффициента регулятора положения |
|
|
|
|
|
|
|
|
и параметров регулируемого электро |
Порядок ЦКУ |
|
Максимальная скоростная ошибка по оси X |
|
Максимальная |
|||
привода, но в то же время они не зави |
|
Разгон |
Торможение |
|
координатная ошибка |
|||
|
|
|
|
|||||
сят от типа интерполятора. |
|
|
|
|
|
|
|
|
— |
|
42 мкм/с (100%) |
–41 мкм/с (100%) |
|
30 мкм (100%) |
|||
Пример отработки прямолинейной |
|
|
||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
19 мкм/с (45,2%) |
–21 мкм/с (51,2%) |
|
9,8 мкм (32,6%) |
||
траектории движения по оси X, описан |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
2 |
|
|
16 мкм/с (38%) |
–19 мкм/с (46,3%) |
|
9,5 мкм (31,6%) |
||
ной сплайном с предложенным алго |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
3 |
|
|
15 мкм/с (35,7%) |
–16 мкм/с (39%) |
|
9,3 мкм (31%) |
||
ритмом разгона/торможения и ЦКУ |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
же ЦКУ в контуре положения график |
|
|
|
|
||||
3 го порядка в контуре положения, |
ми электроприводами с частотой кван |
|||||||
приведён на рис. 11. Верхний график |
изменения координатной ошибки име |
тования в контуре положения до |
||||||
показывает изменение во времени сиг |
ет такой же вид, пропорциональный |
200 Гц и точностью позиционирования |
||||||
нала задания по координате X, а также |
графику |
изменения |
координатной |
1 мкм. В качестве исполнительных |
||||
сигнал обратной связи от датчика поло |
ошибки, с той лишь разницей, что мак |
электроприводов могут быть примене |
||||||
жения. Отсутствие перерегулирования |
симальная |
величина |
координатной |
ны не только электроприводы посто |
||||
по положению в сигнале обратной свя |
ошибки составляет 30 мкм. Получен |
янного тока, но и электроприводы с |
||||||
зи свидетельствует о правильно настро |
ные результаты эксперимента, свиде |
шаговыми и бесконтактными двигате |
||||||
енном регуляторе положения и свое |
тельствующие об эффективности вве |
лями. При необходимости управления |
||||||
временно сформированном задании |
дения цифровой коррекции в контур |
электроприводами с цифровым интер |
||||||
для электропривода. Средний график |
положения, сведены в табл. 2. |
фейсом связи или внешними контрол |
||||||
отражает изменение во времени задан |
|
|
|
|
лерами |
электроавтоматики представ |
||
ной и отработанной координатной ско |
ЗАКЛЮЧЕНИЕ |
|
ленный в статье программно аппарат |
|||||
рости регулируемым электроприводом |
Экспериментально установлено, что |
ный комплекс может быть оснащён |
||||||
по оси X. Нижний график показывает |
разработанное программное обеспече |
соответствующими |
интерфейсами |
|||||
изменение координатной ошибки во |
ние, функционирующее под управле |
связи без изменения базовых алгорит |
||||||
времени. В данном случае мы видим, |
нием многозадачной |
операционной |
мов управления. |
|
||||
что максимальная координатная ошиб |
системы Windows XP, может быть ис |
Исследования показали эффектив |
||||||
ка не превышает 9,3 мкм. В отсутствие |
пользовано для управления следящи |
ность |
предложенных алгоритмов |
|||||
, мкм |
1, 2 |
О |
|
, X |
|
З |
|
X |
|
мкм/с, |
1 |
|
2 |
||
|
||
XО |
|
|
, V |
|
|
XЗ |
|
|
V |
|
X, мкм
t, с
Рис. 11. Пример отработки прямолинейной траектории движения по оси Х при наличии цифровой коррекции:
1 — заданная траектория; 2 — отработанная траектория; X — координатная ошибка; VXЗ, VXО — заданная и отработанная координатная скорость; 52 XЗ, XО — заданное и отработанное перемещение
www.cta.ru |
СТА 1/2007 |
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru
Р А З Р А Б О Т К И / Н А У Ч Н Ы Е И С С Л Е Д О В А Н И Я
управления движением. В частности, |
использования цифровой коррекции |
ЛИТЕРАТУРА |
||
по сравнению с алгоритмом разго |
задающих сигналов определяется за |
1. Сосонкин В.Л., Мартинов Г.М. Концеп |
||
на/торможения |
с трапецеидальной |
данной контурной скоростью и уско |
ция числового программного управления |
|
диаграммой скорости предложенный |
рением, а также геометрией траекто |
мехатронными системами: анализ совре |
||
алгоритм разгона/торможения позво |
рии движения. |
менного мирового уровня архитектурных |
||
лил снизить упругие колебания в меха |
В настоящее время разработанный |
решений в области ЧПУ // Мехатроника, |
||
нической части системы, а также скач |
комплекс используется на кафедре |
автоматизация, управление. 2002. № 7. |
||
ки скорости на участках стыковки ин |
электропривода и электрооборудова |
С. 11 17. |
||
тервалов разгона/торможения на 12,5% |
ния Томского политехнического уни |
2. Сорокин С. Системы реального време |
||
при одинаковой геометрии траектории |
верситета в учебном процессе при про |
ни // Современные технологии автомати |
||
движения. |
|
|
ведении лабораторных занятий по кур |
зации. 1997. № 2. С. 22 29. |
Введение цифровой коррекции в |
сам «Комплексная автоматизация тех |
3. Джордейн Р. Справочник программиста |
||
контур положения позволило значи |
нологических процессов» и «Автома |
персональных компьютеров типа IBM |
||
тельно снизить скоростную, коорди |
тизированный электропривод типо |
PC, XT и AT: Пер. с англ. Предисл. Н.В. |
||
натную и контурную ошибки. Дина |
вых производственных механизмов». |
Гайского. — М. : Финансы и статистика, |
||
мику изменений регулируемых вели |
Дальнейшее развитие данного ком |
1992. – 544 с. |
||
чин при введении ЦКУ отражает |
плекса связывается с его внедрением в |
4. Букреев В.Г., Гусев Н.В. Обзор методов |
||
табл. 2. Наибольший эффект при ис |
системы управления лазерным рас |
интерполяции дискретных траекторий |
||
пользовании цифровой |
коррекции |
кроем листовых материалов и лазер |
движения электромеханических сис |
|
даёт ЦКУ третьего порядка. Это по |
ной гравировки. |
тем // Деп. в ВИНИТИ 28.01.03, № 166 |
||
зволяет уменьшить координатную |
Основными конкурентными пре |
В2003. 2003. С. 1 31. |
||
ошибку на 69%, а скоростную ошибку |
имуществами комплекса являются |
5. Денисова А.В., Сабинин Ю.А. Формиро |
||
на этапе разгона – на 64,3%. Введение |
полная открытость программного ко |
вание задающих воздействий в позицион |
||
ЦКУ второго |
порядка |
позволяет |
да системы управления для модифи |
ном электроприводе // Электротехника. |
уменьшить координатную ошибку на |
кации конечным пользователем, про |
2002. № 9. С. 21 28. |
||
68,4%, а скоростную – на 62%. В свою |
стота технической реализации систе |
|
||
очередь, введение ЦКУ первого по |
мы управления и дальнейшего усовер |
Авторы — |
||
рядка позволяет снизить координат |
шенствования, отсутствие потребно |
сотрудники Томского |
||
ную ошибку на 67,4%, а скоростную – |
сти в значительных капиталовложени |
политехнического университета |
||
на 54,8%. В общем случае эффект от |
ях. ● |
Телефон: (3822) 56 3759 |
||
53
СТА 1/2007 |
www.cta.ru |
© 2007, CTA Тел.: (495) 234 0635 Факс: (495) 232 1653 http://www.cta.ru