

ledenev-a
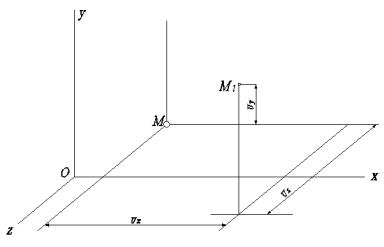
.pdfСиловое поле – физическое пространство, обладающее таким свойством, что на каждую материальную точку М, помещенную в это пространство, действует сила, зависящая от времени. Если сила силового поля не зависит от времени, то поле – стационарное.
Стационарное силовое поле потенциально, если проекции силы силового поля материальной точкой М на координатные оси:
F = ∂u |
; F |
|
= ∂u |
; F = |
∂u |
, |
|
y |
|
||||||
x |
∂х |
|
∂y |
z |
∂z |
|
|
|
|
|
|
|
|||
где u = u(x, y, z) – силовая функция, однозначно зависящая от координат. Сила силового поля
|
|
= i F + jF + |
zF = i ∂u(x, y, z) + j ∂u(x, y, z) + |
|
|
∂u(x, y, z) |
||||||||||||||||||||||
F |
||||||||||||||||||||||||||||
|
z |
|||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
x |
y |
|
|
z |
|
∂x |
|
|
|
|
|
|
∂j |
|
|
|
|
|
|
∂z |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Элементарная работа силы |
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
δA = |
|
δzˆ = F d |
|
+ F d |
|
+ F d |
|
= |
|
∂u |
d |
|
+ |
∂u |
d |
|
+ |
∂u |
d |
|
|
= du(x, y, |
||||||
F |
x |
y |
z |
x |
y |
z |
||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
x |
|
|
y |
z |
|
|
∂u |
|
∂y |
|
|
∂z |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
.
z).
Таким образом, элементарная работа силы потенциального силового поля равна полному дифференциалу силовой функции.
Если точка М перемещается из положения М1 в положение М2, то конечная работа
M 2 M 2
A1, 2 = ∫ δΑ = ∫ du (x, y, z) = u2 − u1,
M1 M1
где u2 = u (x2 , y2 , z2 ), u1 = u (x1, y1, z1).
Для силы, не принадлежащей силовому полю, рассматривается криволинейный интеграл
M 2
A1, 2 = ∫ F cos α ds.
M1
Работа упругой силы (реакция деформированной пружины)
Упругая сила пружины
Fu = −сx1,
где с – постоянный коэффициент пропорциональности (жесткость пружины), равный величине силы Fd при единичном отклонении те-
41

ла М от недеформированного состояния; x1 – величина растяжения
пружины.
Элементарная работа сил упругости
|
|
δA = −cx dx. |
||
Полная работа на перемещении M1M 2 |
||||
M 2 |
M 2 |
M 2 |
||
A1, 2 = ∫δΑ = ∫(−cxdx) = − ∫cxdx = |
1 |
c (x12 − x22 ), |
||
|
||||
M1 |
M1 |
2 |
|
|
M1 |
||||
где (x1 − x2 ) − дополнительная деформация. При рассмотрении упругого стержня
c = EA . l0
Работа силы упругости зависит только от начального и конечного положения тела М.
Поле напряжений, деформаций и перемещений [40]. Поля на-
пряжений и деформаций взаимно однозначны в случае линейноупругих деформаций.
В практике часто используют систему изолиний для анализа результатов измеренний. Приведем некоторые изолинии для плоского поля (рис. 1.18).
Изостаты – траектории главных напряжений, системы из двух семейств S1 и S2 взаимно ортогональных кривых, с которыми совпадают направления наибольших и наименьших главных напряжений.
Уравнение траекторий главных напряжений в дифференциальной форме имеет вид
dy |
= |
σ y − σ x |
± |
1 |
|
|
||
|
(σ x − σ y )2 + 4τxy |
. |
||||||
dx |
|
|
||||||
|
2τxy |
2τxy |
||||||
Изоклины – геометрическое место точек поля напряжений, в которых направления главных напряжений параллельны и имеют один угол наклона ϕ0 , выбранный направлением – параметром изоклины А.
Уравнение изоклин:
tg2ϕ0 = 2τxy /(σ x − σ y ) = A .
42

Рис. 1.18. Характер развития кривых, равных максимальному касательному напряжению под жестким фундаментом
Изохромы – линии, соединяющие точки, в которых разности главных напряжений в рассматриваемой плоскости поля напряжений имеют одну и ту же величину.
Уравнение изохром:
σ1 − σ2 = 
 (σ x − σ y )2 + 4τxy = B .
(σ x − σ y )2 + 4τxy = B .
Изопахи – линии, соединяющие точки с равными значениями сумм главных напряжений.
Уравнение изопах:
σ1 + σ2 = σ x + σ y = C .
Изоэнтаты – линии, соединяющие точки с равными значениями главных напряжений (σ1 или σ2) или главных деформаций (ε1 или ε2).
43
Изотропы – линии одинакового жесткого поворота. Для малых деформаций:
ω = 1/ 2[(∂u / ∂y) − (∂v / ∂y)].
Изокинеты – линии одинаковой величины полного перемещения. Изопарагоги – линии одинаковых частных производных. Изотены – линии одинаковых значений главных Эйлеровых де-
формаций ε1E и ε2E .
Глава 2. ЛИНЕЙНАЯ ТЕОРИЯ УПРУГОСТИ. ТЕОРИЯ ДЕФОРМАЦИЙ
2.1. ТЕНЗОРЫ И ИНВАРИАНТЫ ДЕФОРМАЦИЙ
Обозначения приняты из книги Н.Н. Малинина (1975).
Деформированное состояние в точке тела
ε = ∂ux ; ε = |
|
∂u y |
; ε = ∂uz ; |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
∂x |
|
|
y |
|
∂y |
|
|
|
z |
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
∂u |
x |
|
∂u y |
|
|
|
|
|
|
∂u y |
|
∂u |
z |
|
|
|
|
∂u |
z |
|
∂u |
x |
|
γ |
|
= |
|
+ |
|
|
; γ |
|
|
= |
|
|
+ |
|
; |
γ |
|
= |
|
+ |
|
. |
||||
|
∂y |
∂x |
|
|
|
|
∂z |
|
|
|
∂x |
|
|
|||||||||||||
|
xy |
|
|
|
|
yz |
|
|
|
∂y |
|
zx |
|
|
∂z |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.1. Деформированное состояние в точке тела
44
Относительная объемная деформация в точке
θ = εx + ε y + εz .
Средняя объемная деформация в точке
ε |
|
= |
1 |
(ε |
|
+ ε |
|
+ ε |
|
). |
0 |
|
x |
y |
z |
||||||
|
3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
Модуль объемной деформации
K = |
E |
|
|
. |
|
3(1− 2μ) |
||
Тензор деформации – тензор, который характеризует сжатие (растяжение) и изменение формы в каждой точке тела при деформации
|
|
|
|
|
|
|
|
|
|
ε x |
|
|
|
γ xy |
|
γ |
zx |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
γ xy |
|
|
2 |
|
|
|
2 |
|||||||||
|
|
|
|
|
|
T = |
|
|
ε |
|
|
|
γ yz |
. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|||||||||
|
|
|
|
|
|
ε |
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ yz |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
γ zx |
|
|
ε |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
При тензорной записи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
∂u |
i |
|
|
∂u |
i |
|
|
|
||||
|
|
|
|
|
|
ε |
ij |
= |
|
|
|
|
|
|
+ |
|
|
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
∂xi |
|
|
∂xi |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Разложение тензора деформации |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
Tε = Tε0 + Dε , |
|
|
|
|
|||||||||||||
где |
|
ε0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
T |
= |
|
0 |
ε |
0 |
0 |
|
– |
|
|
шаровой тензор деформаций; |
||||||||||||||
ε0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
ε0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
e |
x |
e |
xy |
e |
|
|
|
|
|
xz |
|
||
Dε = eyx |
ey |
eyz – |
девиатор деформаций; |
|||
|
|
ezy |
|
|
|
|
ezx |
ez |
|
||||
45
ε x = ε x − ε0 , ε y = ε y − ε0 , ε z = ε z − ε0 ;
|
|
ε |
|
= |
γ xy |
, |
|
|
ε |
|
|
= |
|
γ yz |
, ε |
|
|
= |
|
|
γ |
zx |
. |
|
|
|
|
|||||||||||||||||||||
|
|
xy |
|
|
|
|
|
yz |
|
|
|
|
|
|
|
zx |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
В тензорной записи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
e = ε |
|
|
|
− δ |
|
ε |
|
|
; |
|
|
|
ε |
|
|
= |
|
εij |
|
= |
|
1 |
|
δ |
|
ε |
|
|
. |
|
|
|||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
0 |
|
3 |
|
|
3 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
ij |
|
|
|
ij |
|
|
|
ij |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ij |
|
|
ij |
|
|
|
||||||||||||
Первый, второй и третий инварианты тензора деформаций и |
||||||||||||||||||||||||||||||||||||||||||||||||
зависимость между ними |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
I1 (Tε ) = ε x + ε y + ε z ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
I |
2 |
(T ) = −ε |
x |
ε |
y |
− ε |
y |
ε |
z |
− ε |
z |
ε |
x |
|
+ |
γ 2xy |
+ |
γ 2yz |
+ |
γ 2zx |
; |
|||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
4 |
|
|
|
4 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε x |
|
|
|
|
|
γ xy |
|
|
|
|
γ yz |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
I |
|
|
(T ) = |
|
γ xy |
|
|
|
|
|
ε |
|
|
|
|
|
|
|
γ yz |
|
|
, |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ yz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ zx |
|
|
|
|
|
|
|
|
ε z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
ε3 − j (T ) ε |
2 − j |
2 |
(T ) ε − j |
3 |
(T ) = 0. |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
ε |
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|||||||||
Инварианты тензора деформации через главные деформации
j1 (Тε ) = ε1 + ε2 + ε3 ; |
|
|
j2 (Тε ) = −ε1ε2 − ε2ε3 − ε3ε1 ; |
j3 (Тε ) = ε1ε2ε3 . |
||||||||||||||||||||||||||||||
Компоненты девиатора деформации |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j1 (Dε ) = 0 ; |
|
|
|
|
|
|
|
|
|
|
||||||
j |
2 |
(D ) = ε |
x |
ε |
y |
− ε |
y |
ε |
z |
− ε |
z |
ε |
x |
+ ε |
2 |
|
+ ε |
2 |
+ ε2 |
|
= |
|
|
|
|
|||||||||
|
|
σ |
|
|
|
|
|
|
|
|
|
|
|
xy |
|
|
yz |
|
zx |
|
|
|
|
|
||||||||||
= |
1 |
(ε |
|
− ε |
|
)2 |
+ (ε |
|
− ε |
|
)2 + (ε |
|
− ε |
|
)2 |
+ |
3 |
|
(γ 2 |
+ γ 2 |
+ γ 2 |
) |
; |
|||||||||||
|
x |
y |
y |
z |
z |
x |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
xy |
yz |
zx |
|
|
|||||||
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ε |
x |
ε |
xy |
||
|
|
|
|
|
|
|||
j (D ) = ε |
|
|
ε |
|
||||
3 |
ε |
|
|
xy |
|
|
y |
|
|
|
ε |
zx |
ε |
yz |
|||
|
|
|
|
|
||||
εzx
εyz .
εx
46
Интенсивность деформаций – это величина, пропорциональная квадратному корню из второго инварианта девиатора деформаций
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
|||||||||
ε |
|
= |
|
4 |
|
|
|
|
(D ) = U |
|
= |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
(ε |
|
− ε |
|
)2 + (ε |
|
− ε |
|
)2 |
+ |
||||||||||||||||||||||||
|
|
|
j |
|
|
3 |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
3 |
|
|
3 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
i |
|
|
|
2 |
ε |
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
y |
|
|
|
|
|
y |
|
z |
|
|
|
|||||||
|
|
→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ (ε |
|
|
− ε |
|
)2 |
+ |
3 |
(γ 2 |
+ γ2 |
+ λ2 |
|
|
) = |
|
|
2 |
e e = |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
z |
|
x |
|
|
|
2 xy |
|
|
|
yz |
|
|
zx |
|
|
|
|
ij ij |
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
(ε − ε |
2 |
)2 + (ε |
2 |
− ε |
3 |
) |
2 + (ε |
3 |
− ε )2 |
, |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
3 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где U = 
 4 j2 (Dε ) – интенсивность угловых деформаций.
4 j2 (Dε ) – интенсивность угловых деформаций.
Интенсивность пластических деформаций
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
||
|
|
2 |
|
||||||||||||||||
ε p = |
|
|
(ε p − ε p )2 |
+ (ε p − ε p )2 |
+ (ε p |
− ε p )2 |
+ |
||||||||||||
|
|
|
|
|
|||||||||||||||
i |
3 |
|
|
|
x |
y |
y |
z |
|
|
z |
x |
|
|
|||||
→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
3 |
|
(γ p |
)2 + (γ p |
)2 + (γ p |
)2 |
= |
|
2 |
e p e p . |
|
|
||||||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
xy |
yz |
zx |
|
3 |
ij ij |
|
|
||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||
Октаэдрическая угловая деформация
γ |
0 |
= |
2 |
|
(ε − ε |
2 |
)2 |
+ (ε |
2 |
− ε |
3 |
)2 |
+ (ε |
3 |
− ε )2 |
. |
|
||||||||||||||||
|
3 |
1 |
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Закон Гука:
–при растяжении– сжатии
ε x = σ x / E, ε x = ε y = −μεz ;
–при плоском чистом сдвиге
γ= τ / G ;
–при двухосном растяжении
ε |
|
= |
1 |
(σ |
|
− μσ |
|
); |
ε |
|
= |
1 |
(σ |
|
− μσ |
|
); |
ε |
|
= − |
μ |
(σ |
|
+ σ |
|
); |
x |
|
x |
y |
y |
|
y |
z |
z |
|
x |
y |
|||||||||||||||
|
|
E |
|
|
|
|
E |
|
|
|
|
E |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
–для плоского напряженного состояния
ε |
|
= |
1 |
(σ |
|
− μσ |
|
) ; |
ε |
|
= |
|
1 |
|
(σ |
|
− μσ |
|
); |
||||||
x |
E |
x |
y |
y |
E |
y |
z |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
γ |
|
= τ |
|
/ G; ε |
|
= − |
μ |
(σ |
|
+ σ |
|
); |
|
|
|||||||||
|
|
xy |
xy |
z |
|
x |
y |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
47
–при трехосном растяжении
ε |
|
= |
1 |
|
[σ |
|
− μ(σ |
|
+ σ |
|
)]; |
γ |
|
= τ |
|
/ G ; |
||
x |
|
|
E |
x |
y |
z |
xy |
xy |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
= |
|
1 |
|
[σ |
|
− μ(σ |
|
+ σ |
|
)]; |
γ |
|
= τ |
|
/ G ; |
|
y |
|
|
y |
z |
x |
yz |
yz |
|||||||||||
|
|
|
|
E |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ε |
|
= |
1 |
|
[σ |
|
− μ(σ |
|
+ σ |
|
)]; |
γ |
|
= τ |
|
/ G . |
||
z |
|
|
z |
x |
y |
xz |
xz |
|||||||||||
|
|
|
|
E |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.2. ОБЩИЕ СООТНОШЕНИЯ МЕЖДУ ДЕФОРМАЦИЯМИ И ПЕРЕМЕЩЕНИЯМИ [22]
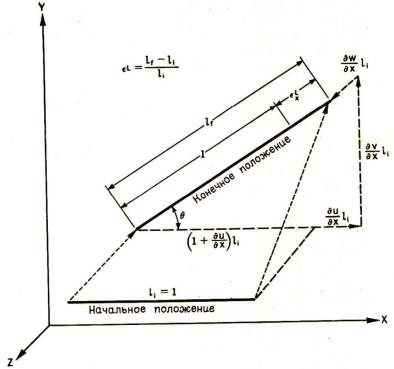
∙ При больших поворотах и больших деформациях (рис. 2.2)
Линейные деформации:
при Лагранжевом определении деформации:
Рис. 2.2. Начальное и конечное положения линейного элемента в поле однородной деформации при Лагранжевом определении деформации
48
εLx =
εLy =
εLz =
|
|
∂u |
|
∂u 2 |
|
∂v 2 |
|
∂w |
2 |
|
||||
1 + 2 |
|
|
+ |
|
+ |
|
|
|
+ |
|
|
|
−1; |
|
|
||||||||||||||
|
|
∂x |
|
∂x |
|
∂x |
|
∂x |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
∂v |
|
∂u 2 |
|
∂v 2 |
|
∂w |
2 |
|
||||
1 + 2 |
|
|
+ |
|
+ |
|
|
|
+ |
|
|
|
−1; |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
∂y |
|
∂y |
|
∂y |
|
|
||||
|
|
∂w |
|
∂u 2 |
|
∂v 2 |
|
∂w |
2 |
|
||||
1+ 2 |
|
|
+ |
|
+ |
|
|
|
+ |
|
|
|
−1, |
|
|
|
|
|
|
||||||||||
|
|
∂z |
|
∂z |
|
∂z |
|
∂z |
|
|
||||
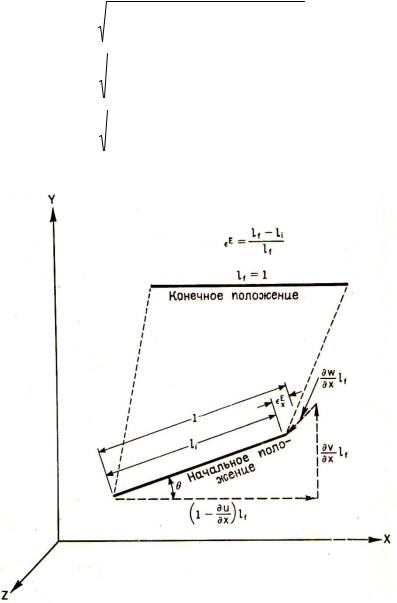
при Эйлеровом определении деформации (рис. 2.3):
Риc. 2.3. Начальное и конечное положения линейного элемента в поле однородной деформации при Эйлеровом определении деформации
49

εEx = 1−
εEy = 1−
εEz = 1−
|
∂u |
|
∂u 2 |
|
∂v 2 |
|
∂w |
2 |
|
|||||||
1− 2 |
|
|
|
+ |
|
|
+ |
|
|
+ |
|
|
; |
|||
|
∂x |
|
∂x |
|
∂x |
|
∂x |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
∂v |
|
∂u 2 |
|
∂v 2 |
|
∂w 2 |
|||||||||
1− 2 |
|
|
|
+ |
|
|
+ |
|
|
+ |
|
|
|
; |
||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
∂y |
|
∂y |
|
∂y |
|
|
|||||||
|
∂w |
|
∂u 2 |
|
∂v 2 |
|
∂w |
2 |
|
|||||||
1− 2 |
|
|
|
|
+ |
|
|
+ |
|
|
+ |
|
|
. |
||
|
|
|
|
|
|
|
||||||||||
|
∂z |
|
∂z |
|
∂z |
|
∂z |
|
|
|||||||
Деформация сдвига:
при Лагранжевом представлении (рис. 2.4):
Рис. 2.4. Начальное и конечное положения двух линейных элементов (первоначально параллельных декартовым осям) в поле однородной деформации при Лагранжевом определении деформации
50