

Глава 4 технология монтажных операций
§ 1. Классификация монтажных операций
По технологическим признакам монтажные операции можно разделить на три группы:
такелажные, связанные с подготовкой конструкции к подъему,— оснастка и строповка (захват);
собственно монтажные, включающие подъем, наводку, ориентирование, установку, выверку и закрепление конструкций;
сопутствующие, предусматривающие антикоррозионную защиту, герметизацию, бетонирование стыков, некоторые виды отделки, установку крепежных деталей, анкеров и т. п.
Состав и последовательность операций зависят от типа монтируемых элементов, строительно-технологических и монтажных характеристик возводимого объекта. Отдельно выполняемые операции (оснастка, выверка, закрепление) могут иметь и самостоятельных исполнителей (такелажников, монтажников, сварщиков, бетонщиков) с четким разграничением круга обязанностей и объема работ. К одновременно выполняемым относятся операции подъема, наводки, ориентирования и уста новки.
§ 2. Оснастка и захват (строповка) конструкций
Оснастка — операция по обстройке монтируемых конструкций приспособлениями и оборудованием, необходимыми для создания удобных, надежных и безопасных условий производства работ. К элементам оснастки относятся: канаты (стальные, пеньковые и капроновые), выполняющие роль стропов, ван-тов, расчалок или оттяжек; распорки, подкосы, тяги, применяемые для выверки и крепления конструкций; навесные лестницы, люльки, подмости, обеспечивающие удобство и безопасность производства работ; монтажные столики, хомуты, петли, кронштейны, подвески для крепления технологического оборудования и другие специальные устройства.
Применяется обычно инвентарная оснастка. Она может навешиваться на конструкции как до подъема, так и после их установки (например, лестницы, люльки, подмости — рис. VIII.7). Сово-
купность элементов оснастки, предназначенных для поддержания, подъема и опускания конструкций, а также для наводки и ориентирования, называют такелажем.
Захват (строповка) — операция, обеспечивающая временное зацепление монтируемых конструкции с монтажными машинами и механизмами.
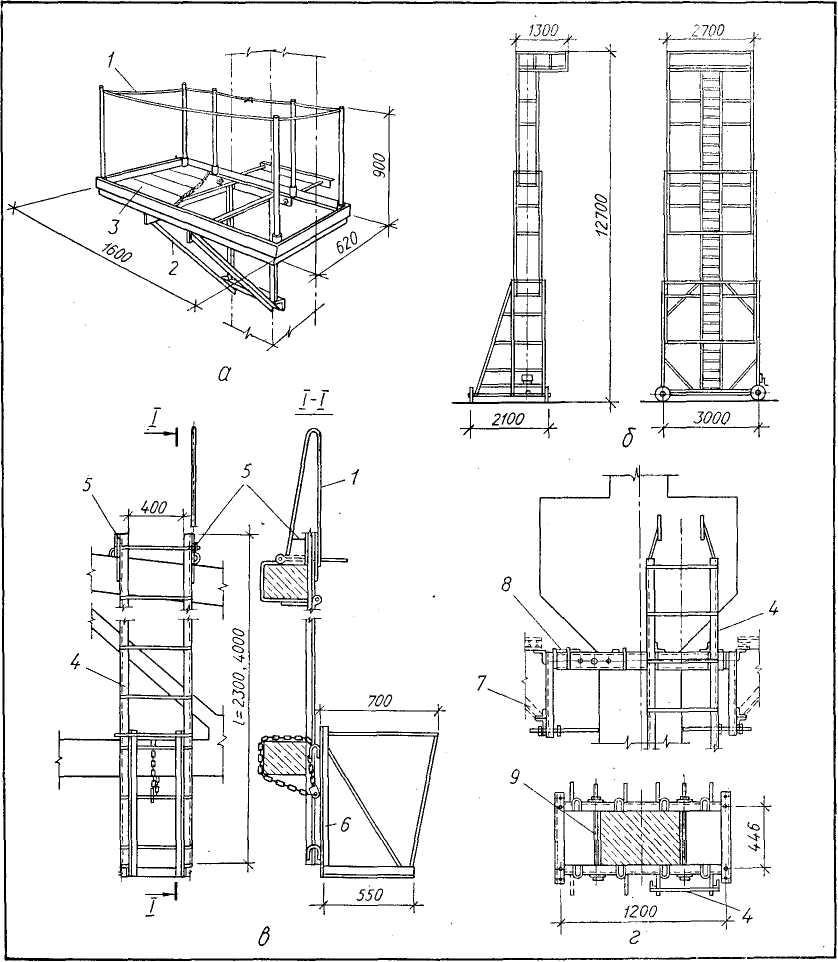
Рис. VIII.7. Монтажные подмости, люльки и лестницы:
а — навесные односторонние подмости; б — катучие подмости; в — лестница с люлькой для навески на фермы; г — присоединение лестницы к колонне с помощью хомутов; / — перила; 2 — кронштейны подмостей; 3 — рабочий настил; 4 — лестница; 5 — элементы навески; б — люлька; 7 — площадка; 8 — хомут; 9 — тяги
хомута
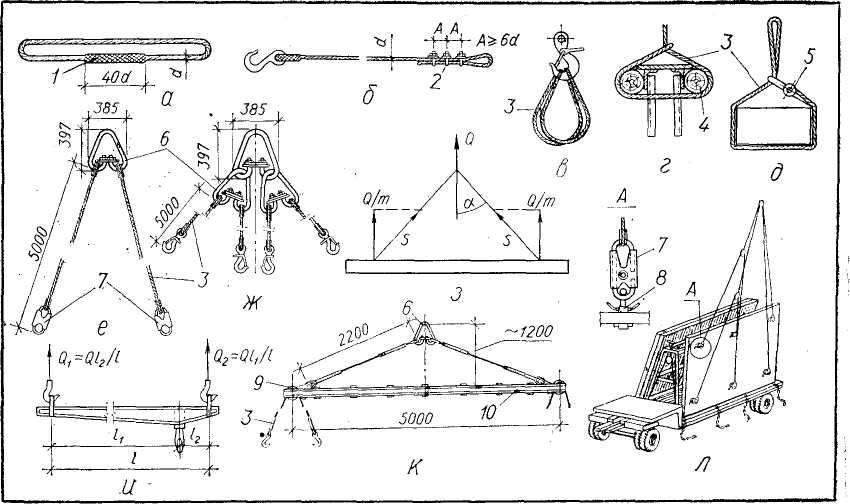
. Рис. VI11.8. Стропы и траверсы:
а, б — универсальный и облегченный стропы; в, г, д — примеры строповки; е, ж — двух- и четырехветвевой стропы; з — расчетная схема стропов; и, к — траверсы для подъема конструкций двумя и одним краном; л — схема кантования панели перекрытия с помощью универсального уравновешивающего стропа; ) — заплетка; 2 — сжимы; 3 — строп; 4 — прокладки; 5 — полуавтоматический захват; в — скоба; 7 — карабин; 8 — захват;
9 — блок; 10 — балка
Все строповочные устройства подразделяют:
по пространственной жесткости — на гибкие и жесткие. Гибкие изготавливаются из канатов и бывают универсальными, облегченными и многоветвевыми (рис. VIП.8). Жесткие в виде металлических лент или захватов применяются в тех случаях, когда поднимаемые конструкции не могут воспринимать усилия, возникающие от гибких стропов, при ограниченной высоте подъема крюка монтажного крана или для удобства производства работ (рис. VIII.9);
по области применения — на универсальные, применяемые для захвата многих типов конструкций, и специализированные, пригодные только для отдельных конструкций;
по способам управления — на дистанционно управляемые, позволяющие производить расстропов-ку на расстоянии, и неуправляемые, отцеп ление которых осуществляется вручную;
по принципу работы — на механические, электромагнитные, вакуумные и комбинированные.
Строповочные устройства должны обеспечивать сохранность, устойчивость и постоянство положения груза во время его подъема; не допускать самопроизвольного отцепления, равномерно распределять усилия между стропами и исключать перенапряжение в монтируемых конструкциях; позволять выполнять строповку и расстроповку простыми и удобными приемами в минимальное время; обладать надежностью и универсальностью; иметь небольшую, по сравнению с монтируемой конструкцией, массу; обеспечивать удобные и безопасные условия работы.
Универсальные гибкие стропы выполняются в виде замкнутой петли длиной от 5 до 15 м из стального каната диаметром 19...30 мм, облегченные стропы — из троса диаметром 12...20 мм с закрепленными на концах крюками, карабинами, скобами или петлями, что упрощает их крепление к монтируемым кострук-циям (рис. VIІІ.8, а, б). Вместо тросов могут применяться цепи. Для обеспечения расстроповки облегченные стропы часто оборудуются полуавтоматическими устройствами.
Многоветвевые стропы (двух-, четырех-, шестиветвевые) применяют при захвате конструкций на две точки и более. Отдельными ветвями служат облегченные стропы, которые крепят к специальной скобе (петле), позволяющей регулировать в них усилия (рис. VIII.8, е, ж). Многоветвевыми стропами можно производить помимо вертикального подъема кантовку конструкций из горизонтального положения в вертикальное и наоборот (рис. VIII.8, л).
При строповке груза одной ветвью канат растягивается силой, равной весу груза. При двух и более ветвях расчетное усилие определяют по формуле
S = G/(m cos a),
где G — масса поднимаемого груза; т — число ветвей стропа, на которые передается масса груза; а — угол отклонения ветвей стропа от вертикали (принимается не более 50...60°).
Диаметр каната устанавливают в соответствии с требуемым запасом прочности, для чего значение усилия 5 умножают на коэффициент запаса, минимальное значение которого для стальных канатов при массе груза до 50 т равно 8, более 50 т — 6.
Траверсы представляют собой конструкции, изготовленные из стальных труб или прокатных профилей преимущественно в виде балок, рам или ферм с подвешенными к ним стропами или металлическими лентами — жесткими стропами (рис. VIII.8, и, к). В последних делают отверстия для продевания штырей. Стропы траверс могут оборудоваться различными видами захватных устройств, что делает их универсальными. Основное назначение траверс — предохранить поднимаемые элементы от сжимающих усилий.
Для лучшего использования грузоподъемности крана применяют пространственные траверсы, при помощи которых можно одновременно поднимать пакет из нескольких элементов (напри-
мер, плит) или монтировать блоки и оболочки С помощью штырей, пальцев, планок, распорных клиньев и других опорных деталей производят захват за отверстия конструкции (рис. VIII.9, а, б, в). При горизонтальном и наклонном расположении отверстий чаще всего применяют цилиндрические опорные части, которые при выдергивании свободно выходят из зацепления. При вертикальном расположении отверстий опорные детали закладывают сверху или снизу, а их форма определяется толщиной и материалом конструкции. В отдельных случаях при глубоких вертикальных отверстиях могут быть использованы клиновидные захваты, работающие на распор.
Консольные захваты служат для подъема плоских горизонтальных конструкций — плит перекрытий, профилированного настила, а также статически устойчивых длинномерных горизонтально устанавливаемых элементов — балок, ригелей (рис. VIII.9, г).
Фрикционные захваты работают на основе использования сил трения, возникающих между поверхностью конструкции и прижимных частей (рис. VIII.9, д).
Клещевые захваты применяют для подъема двутавровых железобетонных конструкций, профилированных и листовых металлоконструкций (рис. VIII.9, з).
Вакуумные захваты — это малогабаритные камеры (присосы) с резиновым уплотнительным кольцом, внутренняя полость которых сообщена с вакуумным насосом. Захват конструкций осуществляется накладыванием камеры на их поверхность и созданием внутри камеры разрежения. Грузоподъемность этих захватов зависит от площади присо-сов и степени разрежения воздуха (рис. VIII.9, и).
Электромагнитные захваты представляют собой стальной корпус круглого или прямоугольного сечения, внутри которого размещена катушка (рис. VIII. 9, к). Захват производится при подаче в катушку по гибкому кабелю постоянного тока. Грузоподъемность электромагнитных захватов — от нескольких сот килограммов до нескольких тонн.
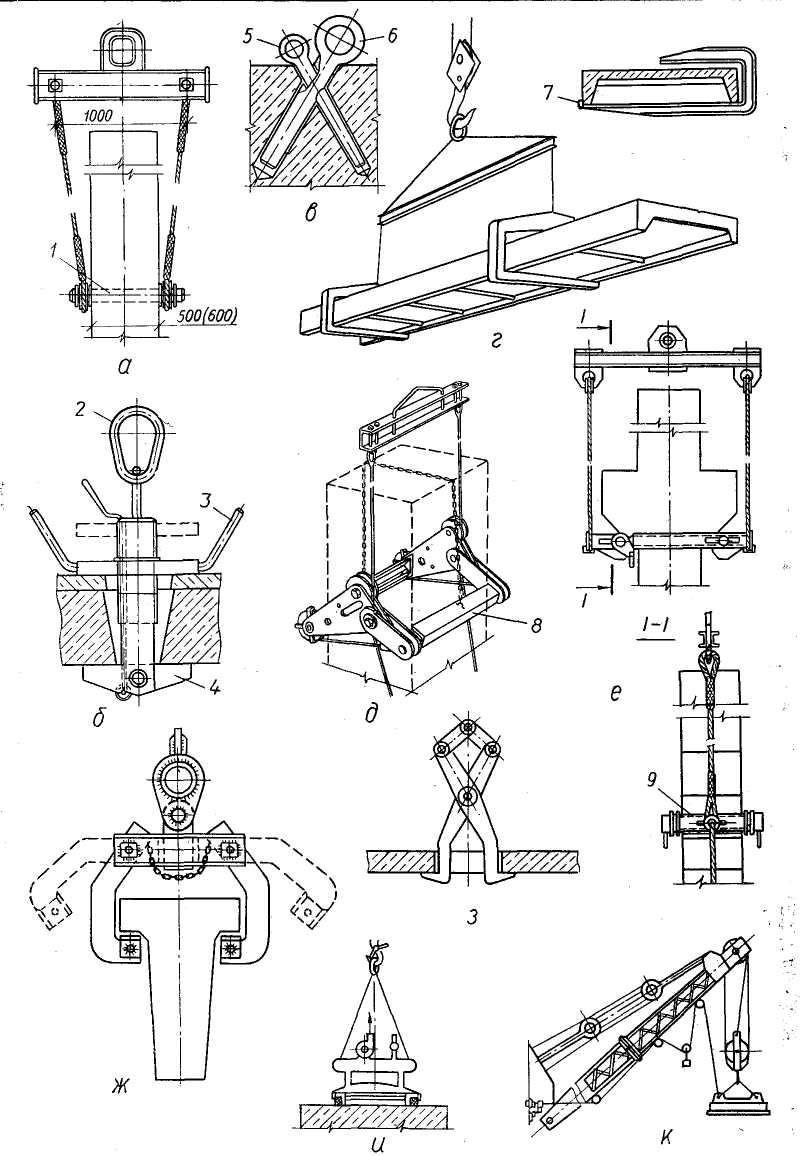
Рис. VIII.9. Захваты:
а, б, в — штыревые, устанавливаемые в горизонтальных, вертикальных и наклонных отверстиях; г — консольный; д — фрикционный; е — рамочный;- ж — рычажный; з — клещевой; и — вакуумный; к — электромагнитный; 1 — штырь; 2 — скоба (петля); 3 — гаечный зажим; 4 — сухарь; 5 — расклинок; 6 — штырь; 7 — фиксатор; 8 — прижимы (балочки); 9 — боковина рамки
.