

5.4. Формирование управляющих аналоговых сигналов
Для управления аналоговыми исполнительными механизмами в микропроцессорных системах управления объектами необходимо применение цифроаналоговых преобразователей ЦАП / 8 /.
В качестве примера ЦАП рассмотрим отечественную микросхему К572ПА1, предназначенную для преобразования десятиразрядного цифрового кода в пропорциональное значение аналогового тока на выходе. Условное обозначение ЦАП показано на рис. 60.
D1- D10 – цифровые входы;
RОС – вывод для подключения резистора обратной связи;
I1 и I2 - аналоговые выходы;
UОП – вывод для подачи опорного напряжения.
Микросхема потребляет ток IПОТР = 2 мА. Время установления аналогового сигнала при изменении цифрового кода составляет 5 мкС.
Выходное напряжение UВЫХ ЦАП и его полярность зависит от полярности и величины напряжения на выводе UОП. Так, например, если UОП = -10В, то UВЫХ будет изменяться в диапазоне от 0 до +10 В при изменении кода на входах D1 - D10.
На выходе ЦАП имеет место квантованный сигнал (рис.61).
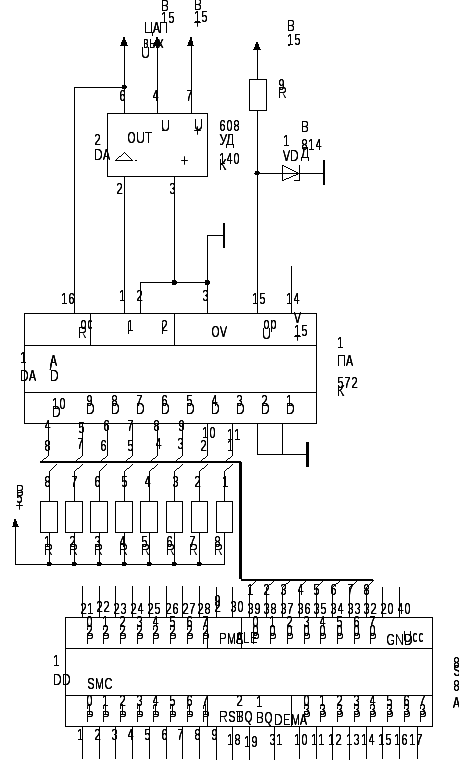
Рис. 60. Схема подключения ЦАП К572ПА1 к МК
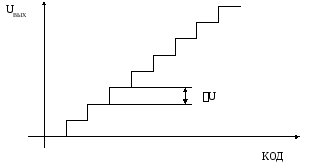
Рис. 61. Выходной квантованный сигнал ЦАП
Уровень квантования определяется по формуле
(5.9)
![]()
![]() ,
,
где n – разрядность ЦАП.
Для ЦАП К572ПА1 U составит 10В/1024 10 мВ. Для рассмотренной схемы рис. 60 разрядность ЦАП составляет 8, поэтому U 10B/255 40 мВ. При разработке микропроцессорных систем управления необходимо учитывать погрешность, вносимую разрядностью ЦАП. Микросхема К572ПА1 подключается цифровыми входами к любому из портов. В рассматриваемой схеме к порту Р0 подключаются также подтягивающие резисторы R1 – R8. На выходе ЦАП имеем аналоговый ток, для преобразования его в напряжение необходим усилитель DA2 (К140УД608). Разряды D1 и D2 необходимо подключить к общей шине, поскольку при высоком входном сопротивлении входов на них могут наводиться помехи.
Пример 1. Необходимо разработать программу для формирования на выходе ЦАП пилообразного сигнала рис. 60.
CAP EQU P0; Обозначение порта Р0
<1> PILA: MOV CAP,#00 ; Обнуление порта Р0
<2> NOP ;
<3>AGAIN: INC CAP ; Инкремент значения порта Р0
<4> CALL DELAY ; Вызов задержки
<5> JMP AGAIN ;
<6>DELAY: ; Задержка, определяющая частоту сигнала
<7> RET ;

Рис. 62. Пилообразный сигнал на выходе ЦАП
В цикле AGAIN происходит инкремент содержимого порта Р0 ( шаги 3,4 и 5). При достижении Р0 = FFH следующий инкремент приводит к обнулению порта Р0. Временная задержка DELAY будет определять время нарастания аналогового сигнала от 0 до максимума. DELAY определяет период Т и частоту программируемого пилообразного сигнала.
Пример 2. Необходимо разработать программу, обеспечивающую формирование на выходе ЦАП треугольного сигнала (рис. 63).
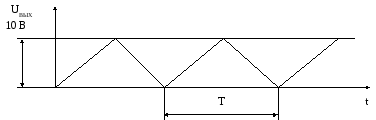
Рис. 63. Треугольный сигнал на выходе ЦАП
CAP EQU P0 ; Обозначение порта Р0
<1>TRIAN: MOV CAP,#00 ;
<2> CLR A ;
<3>INCR: INC CAP ; Формирование нарастающего фронта
<4> CALL DELAY ; сигнала
<5> MOV A,CAP ;
<6> CJNE A,#0FFH,INCR;
<7>DECR: DEC CAP ; Формирование спадающего фронта
<8> CALL DELAY ; сигнала
<9> MOV A,CAP ;
<10> CJNE A,#00,DECR;
<11> JMP TRIAN ; Сформировать следующий импульс
<12>DELAY: ; Задержка, определяющая частоту сигнала
<13> RET ;
Шаги со 2 по 6 формируют нарастающий фронт, шаги с 7 по 10 - спадающий фронт треугольного сигнала. Подпрограмма задержки так же, как и в предыдущем примере, определяет период и частоту сигнала.
З а д а н и я д л я с а м о с т о я т е л ь н о й р а б о т ы
Разработать программу для формирования трапецеидальных симметричных импульсов на выходе 10- разрядного ЦАП, длительность импульса и паузы 500 мкС.
Разработать программу для формирования прямоугольных симметричных импульсов на выходе 10 – разрядного ЦАП, длительность импульса и паузы 1мС.