5.5. Дослідження форми гіперболічного параболоїда
Для більшої ясності рисунка змінимо розташування осей. Виберемо за площину рисунка площину у=0 (рис.33).
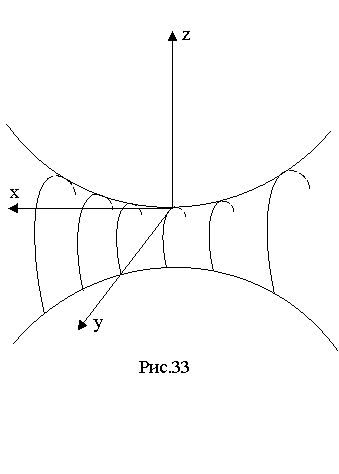
В перерізі гіперболічного параболоїда
![]()
площиною рисунка маємо параболу
у=0, х2=2а2z
В перерізі площинами x=d одержуємо параболи
x=d, ![]()
В перерізі площинами z=-|h| маємо гіперболи
z=-h, 
Вся поверхня має “сідловидну” форму.
6. Дослідження форми конуса 2-го порядку
В перерізі конуса 2-го порядку
![]()
площиною х=0 одержуємо дві прямі, що перетинаються на початку координат (рис.34).
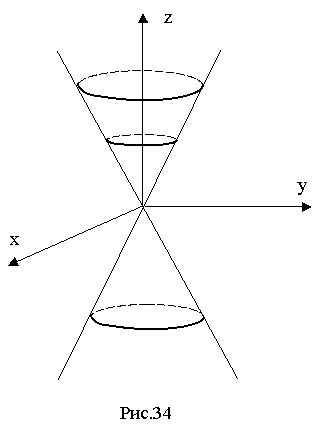
х=0, ![]()
Перетинаючи поверхню площинами z=h, одержуємо еліпси
z=h, 
Перетинаючи поверхню площинами, які проходять через вісь z, тобто площинами y=kx, одержуємо дві прямі, що перетинаються.
y=kx, 
або
y=kx, ![]()
Використовуючи вже вказаний при вивчені кривих 2-го порядку метод перетворення координат, можна довести, що будь-яка поверхня 2-го порядку представляє собою або один із 9-ти розглянутих типів поверхонь, або випадок їх виродження (дві площини, що перетинаються або паралельні, одна площина, одна пряма, одна точка, пуста множина точок).
Приклади розв`язку задач
1.202 Яку поверхню визначає в просторі рівняння:
1) х2=4у; 2) z2=xz?
1) Рівняння х2=4у визначає параболічний циліндр з твірними паралельними осі Oz.
Направляючою циліндричної поверхні є парабола x2=4y, z=0.
2) Рівняння z2=xz може бути представлено у вигляді z(z-x)=0 і розпадеться на два рівняння: z=0 і z=х, тобто воно визначає дві площини - площину хоу і бісектральну площину z=x, яка проходить через вісь оу. ^
1.203
Скласти рівняння конічної поверхні,
вершиною якої є точка М(0;0;1), а направляючою
- еліпс ![]() , z=3.
, z=3.
Запишемо рівняння твірної АМ, де A(x0;y0;z0) - точка, яка лежить на еліпсі:
![]() .
.
Оскільки
точка А лежить
на еліпсі, тоді її координати задовольняють
рівнянню еліпса, тобто ![]() , z0=3.
Виключивши тепер x0,
y0 і z0 із
системи
, z0=3.
Виключивши тепер x0,
y0 і z0 із
системи
![]() ;
; ![]() ;
; ![]() ;
z0=3,
;
z0=3,
одержимо
рівняння конуса: ![]()
1.204 Привести до канонічного вигляду рівняння 4x2+9y2+36z2-8x-18y-72z+13=0.
Згрупуємо члени з однаковими координатами
4(x2-2х)+9(y2-2у)+36(z2-2z)=-13.
Доповнимо до повних квадратів вирази в дужках, одержимо
4(x2-2х+1)+9(y2-2у+1)+36(z2-2z+1)=-13+4+9+36
або
4(x-1)2+9(y-1)2+36(z-1)2=36
Зробимо паралельний переніс осей координат, де за новий початок координат виберемо точку О ' (1;1;1), формули перетворення координат мають вигляд х=х'+1; у=у'+1; z=z'+1. Тоді рівняння поверхні запишеться так:
![]()
Це рівняння визначає еліпсоїд; його центр знаходиться в новому початку координат, а напівосі відповідно дорівнюють 3; 2 і 1.
§6 Полярна система координат на площині. Циліндрична і сферична системи координат в просторі
Ми розглядали дотепер тільки прямокутні декартові системи координат. Поряд з ними використовуються іноді і інші координатні системи. В задачах на площині це найчастіше полярна система координат. В просторових задачах - циліндрична і сферична координатні системи.
6.1. Полярна система координат на площині
Виберемо на площині деяку фіксовану точку О - початок координатної системи або полюс. Фіксований промінь (напівпряма) з вибраним на ньому одиничним вектором із початком в полюсі назвемо полярною віссю.
Положення
будь-якої точки М на площині будемо
визначати впорядкованою парою чисел:
довжиною радіуса
- вектора ![]() (рис.
35)
(рис.
35)
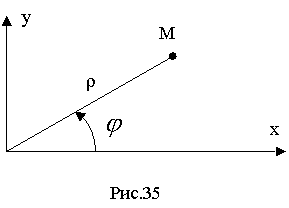
та
вираженим в радіанах кутом між
полярною віссю і вектором ![]() .
Оскільки така система координат
розглядається тільки на площині, тоді
можна враховувати і напрямок відліку
кута; кут вважається додатнім, якщо
напрям обертанням від полярної осі до
радіус - вектора береться проти часової
стрілки.
.
Оскільки така система координат
розглядається тільки на площині, тоді
можна враховувати і напрямок відліку
кута; кут вважається додатнім, якщо
напрям обертанням від полярної осі до
радіус - вектора береться проти часової
стрілки.
Запис
М0( 0; 0)
показує, що в деякій фіксованій полярній
системі координат довжина радіус -
вектора ![]() 0 дорівнює 0,
а кут між полярною віссю і
0 дорівнює 0,
а кут між полярною віссю і ![]() 0 (полярний
кут) дорівнює 0.
Число 0 і 0 називаються
полярними координатами точки М0.
Координати 0 і 0 повністю
визначають положення точки М0.
Завдання точки М0 однозначно
визначає лише число 0 -
довжину радіуса-вектора. Полярний кут
визначається тільки з точністю до
доданка, кратного 2 .
Для полюса полярний кут взагалі не
визначений. Довжина радіус-вектора для
різних точок площини може змінюватися
від 0 до +
0 (полярний
кут) дорівнює 0.
Число 0 і 0 називаються
полярними координатами точки М0.
Координати 0 і 0 повністю
визначають положення точки М0.
Завдання точки М0 однозначно
визначає лише число 0 -
довжину радіуса-вектора. Полярний кут
визначається тільки з точністю до
доданка, кратного 2 .
Для полюса полярний кут взагалі не
визначений. Довжина радіус-вектора для
різних точок площини може змінюватися
від 0 до +![]() ,
полярний кут від -
,
полярний кут від -![]() до +
до +![]() .
.
Неважко встановити правила переходу від полярної системи координат до декартової і навпаки.
Помістимо початок декартової системи координат в полюсі полярної системи і направимо ось абсцис вздовж полярної вісі. Тоді
![]()
Із формул (1) знаходимо:
![]() (2)
(2)
Полярний кут визначається двома формулами. Виберемо одну з них, одержимо два значення , які лежать між 0 і 2 . Щоб вибрати єдине (з точністю до доданку кратного 2 ) необхідне значення, враховують знак 2-ої тригонометричної функції кута .
Як і в декартовій системі координат, кожній лінії на площині відповідає рівняння, яке зв`язує і , і, навпаки, кожному рівнянню, яке зв`язує і , відповідає, як правило, деяка лінія на площині із заданою полярною системою координат.
Для побудови лінії, заданої рівнянням в полярній системі координат, частіше використовують метод побудови “по точках” - обчислюють координати ряду точок лінії і сполучають ці точки плавною кривою.
Приклад 1.211. Побудувати лінію =2(1+cos ).
Розв`язок. Складаємо таблицю

![]()
Оскільки сos =cos(2 - ), тоді обчислення значення при не потрібно. Крива повинна бути симетричною відносно полярної осі. Наносячи відповідні точки на рисунок і сполучаючи їх плавною лінією, одержимо вигляд лінії, що розглядається (рис.36).
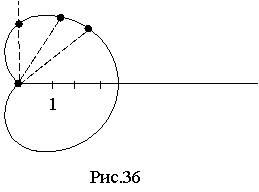
Ця лінія називається кардіоїдою.
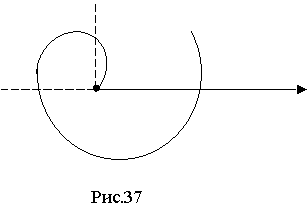
Приклад
2. Побудувати
лінію ![]()
Розв`язок. Складаємо таблицю, починаючи з =0 (при 0 одержимо 0, що неможливо).

![]()
Одержана лінія називається спіраллю Архімеда (рис.37).