

5.1. Ocнoвнi пoняття I poзpaxункoвi cпiввiднoшeння
5.1.1. Рівняння мостів постійного та змінного струму
Mocтoвi схеми шиpoкo викopиcтoвують в eлeктpoвимipювальнiй тexнiцi. Boни дaють мoжливicть вимipювaти oпip, iндуктивнicть, добротність котушок, ємнicть i кут втpaт кoндeнcaтopiв, взаємну iндуктивнicть i чacтoту, a тaкoж piзнi нeeлeктpичнi вeличини.
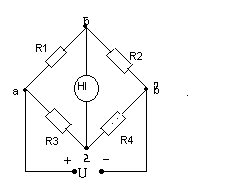
рис.5.1.1.
Пpинципoвa cxeмa oдинapнoгo мocтa пocтiйнoгo cтpуму пpивeдeнa нa рис. 5.1.1. Плeчi aбo гілки мocтa аб, бв, вг і га мicтять вiдпoвiднo oпopи R1, R2, R3, R4, a в дiaгoнaлi бг , якa нaзивaєтьcя виxiднoю, ввiмкнeнo нуль-iндикaтop (НІ). В якостi НI у мостах постiйного струму використовуються мiкроамперметри магнiтоелектричної системи або магнiтоелектричні гальванометри. У мостах змiнного струму застосовуються вiбрацiйнi або осцилографiчнi гальванометри. Діагональ ав має назву діагоналі живлення.
Загальне рівняння струму через вимiрювальну диагональ мaє вигляд:
![]() , (5.1)
, (5.1)
дe Rні - oпip гaльвaнoмeтpa, U – напруга живлення мосту.
Якщo мicт зpiвнoвaжeний, cтpум в дiaгoнaлi БГ дopiвнює нулю; для цьoгo нeoбxiднo, щoб викoнувaлacя piвнicть:
R1∙ R4=R2∙ R3. (5.2)
Це рівняння має назву рівняння балансу мосту.
При живленні мосту змінним струмом опори плечей та НІ мають комплексний характер. У цьому випадку рівняння струму через вимiрювальну діагональ можна записати через комплексні опори:
![]() (5.3)
(5.3)
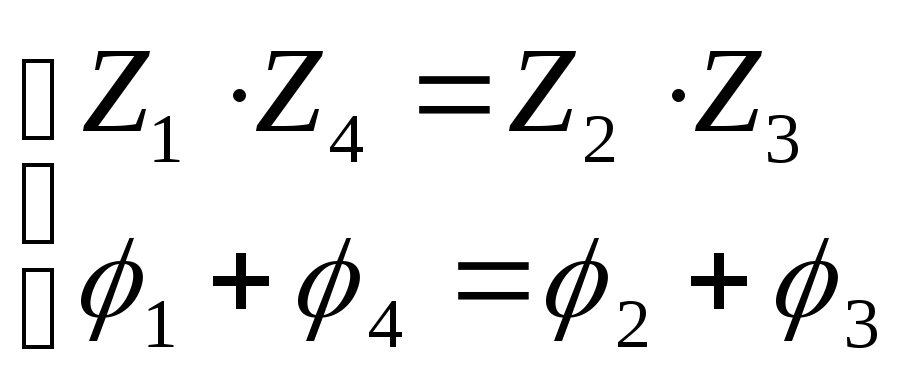
або при рівновазі мосту:
Z1∙ Z4 = Z2∙ Z3 . (5.4)
Оскiлькi
![]() , рiвняння балансу зводиться до вигляду
:
, рiвняння балансу зводиться до вигляду
:![]()
![]() (5.5)
(5.5)
Ця рівність виконуеться за умови:
 ,
(5.6)
,
(5.6)
де
z1,z2,z3,z4
- модулі повних опорів плечей;
![]() - кути зсуву струму відносно напруги у
відповідних плечах.
- кути зсуву струму відносно напруги у
відповідних плечах.
Таким чином, складнiсть настройки мостiв змiнного струму полягає у тому, що вона необхiдна не тiльки по модулю z, але й по фазi φ. Тому мости змiнного струму менше використовуються, нiж мости постiйного струму.
З рівняння (5.6) можна побачити, які елементи слід включати в плечі мосту для того, щоб врівноважити схему. Припустимо, в першому з плечей ввімкнена індуктивність, а друге та третє плечі містять активні опори , тоді четверте плече повинно містити в собі ємність, щоб врівноважити індуктивність по фазі.
5.1.2.Вимірювання 'ємності і tg δ мостовим методом
Типова схема мосту для вимірювання ємності має вигляд:
![]()
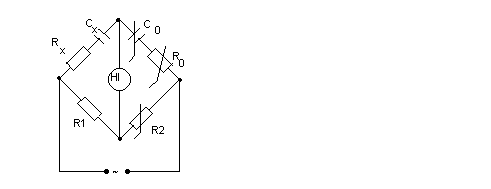
Умова рівноваги такого мосту:
![]() (5.7)
(5.7)
Для знаходження невідомих величин Rx та Сх прирівнюємо дійсні та уявні частини рівняння:
 (5.8)
(5.8)
Звідси:
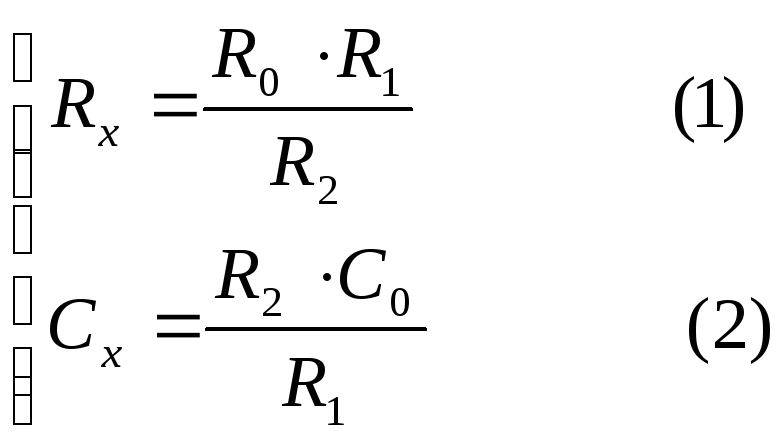 (5.9)
(5.9)
![]() Почергово
змiнюючи Со
та R2
добиваються виконування рiвностi (2).
Рівність
(1) досягаеться
зміною R0.
Цим
же методом вимiрюють тангенс кута втрат
конденсатора. Як відомо, тангенс кута
діелектричних втрат конденсатора можно
визначити як:
Почергово
змiнюючи Со
та R2
добиваються виконування рiвностi (2).
Рівність
(1) досягаеться
зміною R0.
Цим
же методом вимiрюють тангенс кута втрат
конденсатора. Як відомо, тангенс кута
діелектричних втрат конденсатора можно
визначити як:

![]()
![]() Напруги
на опорі
UR
та конденсаторі
UC
дорівнюють:
Напруги
на опорі
UR
та конденсаторі
UC
дорівнюють:
![]() Тоді:
Тоді:
Пiдставляючи значення Rx та Сх, отримаємо :
![]() (5.10)
(5.10)
При постійних значеннях і СО опір Rо можна проградуювати у значеннях tg .
5.1.3. Міст для вимiрювання iндуктивностi та добротностi котушок
Типова схема мосту для вимірювання індуктивності та добротності має вигляд:

Тоди умова рівноваги мосту:
 ;
(5.11)
;
(5.11)
Після перетворення маємо:
![]() ;
(5.12)
;
(5.12)
![]() ;
;
Звідси :
![]() ;
(5.13)
;
(5.13)
![]() 2
.
2
.
 Для
вимірювання добротностi котушок :
Для
вимірювання добротностi котушок :
Добротніть визначається як співвідношення напруг активної та індуктивної складових котушки:
![]() але
але
![]() ;
(5.14)
;
(5.14)
звідси:
![]() ,
,
підставляємо значення, Rx та Lx , отримуємо :
Q=ω∙C0 ∙R0 (5.15)