

3.4 Принципы построения систем формирования частотно-модулированных зондирующих сигналов
Широкополосными (сложными) сигналами называют сигналы, ширина спектра которых значительно превышает величину 1/и.
Основными их преимуществами являются: возможность значительного повышения энергии зондирующего импульса за счет увеличения его длительности при сохранении высокой разрешающей способности и точности измерения дальности.
Для расширения спектра сигнала можно использовать модуляцию высокочастотных колебаний в пределах импульса: амплитудную, частотную, амплитудно-частотную. С точки зрения оптимальности энергетического режима работы передатчика наиболее приемлемой является частотная (фазовая) модуляция.
3.4.1 Виды частотной модуляции и их характеристика
В РЛС с частотно-модулированным сигналом возможно применение зондирующих импульсов с линейной частотной модуляцией (ЛЧМ), частотной модуляцией по V-образному закону, нелинейным законом изменения частотны (НЧМ), частотной манипуляцией. Рассмотрим эти сигналы.
Сигналы с ЛЧМ. Мгновенная частота заполнения таких сигналов меняется по линейному закону.
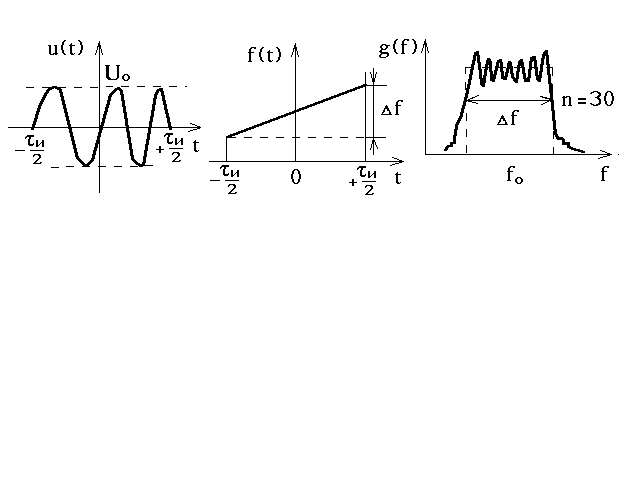
ЛЧМ радиоимпульс (рис.3.19,а) описывается выражением
Uо·cos (2·fо·t + ·f·t2/и) |t| и/2
u(t) = 0 |t| > и/2
где Uо – амплитуда, fо – средняя частота ЛЧМ сигнала; и – длительность, f – девиация частоты ЛЧМ сигнала.
Мгновенная частота импульса f(t) изменяется по линейному закону (рис.3.19,б). В самом деле

В пределах импульса частота изменяется от fо – f/2 до fо+ f/2.
АЧС ЛЧМ сигнала описывается через так называемые интегралы Френеля и носит осциллирующий характер (рис.3.19,в). При большой базе сигнала n = и·f > 1 АЧС можно грубо аппроксимировать прямоугольником шириной f.
Из анализа временного и частотного описания сигнала следует, что можно независимо осуществлять выбор длительности импульса и и ширины АЧС Пс = f. Первое позволяет обеспечить необходимую энергию сигнала, а второе – требуемую разрешающую способность по дальности.
Требования к стабильности частоты при формировании ЛЧМ сигнала на 2-3 порядка выше, чем при формировании одиночного простого радиоимпульса.
а) б) в)
г)
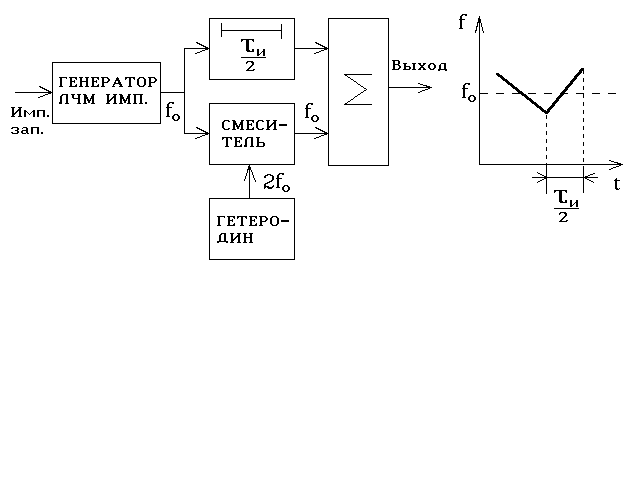
Рис.3.19. ЛЧМ сигнал и формирование сигналов с частотной модуляцией по V-образному закону.
Длительность ЛЧМ импульсов составляет обычно единицы мкс – единицы мс, а девиация частоты f выбирается в пределах от сотен килогерц до сотен мегагерц. Например, в РЛС 22Ж6М и=30 мкс, а f может принимать значения 4,5 МГц и 75 МГц.
Достоинство ЛЧМ импульсов – сравнительная простота технической реализации устройств, обеспечивающих их формирование и оптимальную фильтрацию.
Недостатками сигналов с ЛЧМ являются:
1. Сильная взаимная связь параметров сигнала, характеризующих дальность и доплеровский сдвиг, приводящая к ошибке измерения дальности при неизвестной скорости цели и наоборот.
2. Появление дополнительных потерь за счет рассогласования частотной характеристики линейной части приемника и спектра отраженного сигнала из-за необходимости использования весовой обработки для уменьшения уровня боковых лепестков сжатого импульса до приемлемого уровня.
В РЛС обнаружения с ЛЧМ импульсом «скоростная» ошибка измерения дальности возникает по следующей причине. Доплеровское смещение частоты отраженного сигнала вызывает временное смещение выходного импульса оптимального фильтра (сжатого импульса).
Время смещения (запаздывания) t отраженного сигнала равно
t = Fд·и/Пи = 2Vr·и/·Пи,
где Пи – ширина спектра ЛЧМ импульса (при больших значениях произведения Пи.и ширина спектра ЛЧМ импульса примерно равна девиации частоты f).
Ошибка определения времени запаздывания приводит к ошибке измерения дальности
R = c·t/2 = c·и·Vr/·Пи.
В РЛС, предназначенных для обнаружения средств воздушного нападения этой ошибкой в большинстве случаев можно пренебречь. Рассчеты для РЛС 22Ж6М показывают, что при и = 30 мкс, V = 1000 м/с, = 0,2 м, Пи = 4,5 МГц величина R составляет примерно 10 метров.
Сигналы с частотной модуляцией по V-образному закону. Принцип формирования таких сигналов иллюстрируется рис.3.19,г.
Достоинством их в сравнении с ЛЧМ импульсами является возможность исключения скоростной ошибки в связи с симметричным характером модуляционной характеристики. Недостатком является некоторое усложнение устройств формирования и обработки сигналов.
Сигналы с НЧМ. Использование нелинейных законов изменения частоты в пределах импульса позволяет получить шумоподобный сигнал с телом неопределенности близким по форме к идеальному. При этом можно избежать потерь в отношении сигнал-шум, связанных с весовой обработкой ЛЧМ. Недостатками сигналов с НЧМ являются:
1. Усложнение РЛС из-за возможной необходимости использования многоканальной обработки отраженных от целей сигналов.
2. Недостаточный уровень разработки устройств для генерации сигналов с НЧМ.
3. Необходимость подбора и разработки специального закона частотной модуляции в тех случаях, когда требуется обеспечить заданный уровень боковых лепестков.
Вследствии большой крутизны главных сечений тела неопределенности в области основного типа сигналы с нелинейной частотной модуляцией полезны в системах сопровождения, где значения дальности и радиальной скорости цели приближенно известны.
Сигналы с НЧМ используются в режиме обзора в РЛС 22Ж6М.
Сигналы с частотной манипуляцией. Подобные сигналы формируются путем скачкообразного изменения частоты в пределах зондирующего импульса. Последний состоит из последовательности N импульсов (элементов) длительности эл, причем несущая частота каждого импульса выбирается случайным или детерминированным образом из некоторого набора частот, перекрывающего рабочий диапазон РЛС.
В том случае, когда смещение по частоте между соседними парциальными импульсами обратно их длительности (f = 1/эл), принципиально возможно получение коэффициента сжатия, равного N2. Однако при этом, с одной стороны, резко возрастают требования к стабильности фазовых характеристик систем формирования и обработки сигналов, а, с другой, исключительная возможность получения большой ширины спектра из-за ограниченности интервала когерентности по частоте.
На практике, как правило, находят применение сигналы с частотным разносом парциальных импульсов f >> 1/эл (так называемые многочастотные сигналы). Каждый отраженный парциальный импульс при этом обрабатывается своим частотным каналом, выходы, которых объединяются на видеочастоте (РЛС 19Ж6,5Н84А,64Ж6).
Рассмотрим подробнее принципы построения систем формирования зондирующих сигналов с линейной частотной модуляцией.