

Mekhatronika_KPMO_EMO / Методичка по самост.раб / МЕТОД.ПО САМОСТ.РАБ
.doc
Введение
Цель преподавания дисциплины “Мехатроника” заключается в освоении студентами теоретических и практических знаний, связанных с проектированием, производством и эксплуатацией современных мехатронных машин с компьютерным управлением.
Основные знания. После изучения дисциплины Мехатроника студент должен знать:
- основные определения, терминологию, этапы развития мехатроники, преимущества мехатронных устройств.
- общее устройство, принцип действия мехатронных объектов в машиностроительных технологиях, робототехнике, транспорте, компьютерной технике;
- методы решения задач кинематики манипуляторов промышленных роболтов;
- устройство, принцип работы, характеристики и область применения основных типов первичных преобразователей информации для информационных систем мехатронных машин;
- принципы модуляции, дискретизации, кодирования сигналов и их передачи по линиям связи;
- структуру цифровой системы управления мехатронным агрегатом и основные типы регуляторов.
- характеристики исполнительных устройств мехатронных объектов;
- методы проектирования мехатронных систем.
Основные умения. После изучения дисциплины Мехатроника студент должен уметь:
- решать задачи кинематики манипуляторов промышленных роботов;
-определять геометрические параметры рабочего пространства манипуляторов;
- с помощью программных пакетов САПР разрабатывать и исследовать электропневматические схемы систем автоматики мехатронных агрегатов;
- разрабатывать структурные схемы систем управления приводом мехатронных агрегатов;
- использовать полученные знания при проектировании современных мехатронных горных машин.
В соответствии с рабочим учебным планом на изучение дисциплины «Мехатроника» для студентов очной формы обучения отводится 32 часа лекции, 16 часов лабораторных занятий, 96 часов самостоятельной работы студентов. Контроль знаний, полученных при изучении дисциплины “Мехатроника”, осуществляется:
- для студентов очной формы обучения в процессе сдачи модульных контролей, коллоквиума по лабораторным занятиям;
- для студентов заочного факультета в процессе выполнения контрольной работы, сдачи экзамена.
1 СОДЕРЖАНИЕ ДИСЦИПЛИНЫ
1.1 Введение. Общие сведения о мехатронике
Основные определения и терминология: мехатроника, синергетическая интеграция, мехатронные система, объект, модуль, комплекс. Этапы становления мехатроники. Основные преимущества мехатронных устройств. Стадии автоматизации производства и этапы развития промышленности. Классификация мехатронных объектов. Структура и принципы интегрирования мехатронных модулей и машин.
/1, с. 3-33; 2, с. 8-86/
1.2 Мехатронные системы в машиностроительных технологиях.
Технологии быстрого прототипирования, станки с ЧПУ. Машины с параллельной кинематикой (гексаподы). Решение обратной задачи о положении для трипода. Общие сведения о SCADA-системах и CALS-технологии.
/1, с. 34-46; 2, с. 167-180/.
1.3 Промышленные роботы как мехатронные системы.
Структурная схема и классификация промышленных роботов. Характеристика роботов 1, 2 и 3-го поколений. Манипуляторы промышленных роботов. Число степеней подвижности. Кинематические схемы манипуляторов работающих в декартовой, цилиндрической и сферической системах координат.
Манипуляторы промышленных роботов антропоморфного типа. Переносные и ориентирующие степени подвижности.
Использование матриц винтового смещения для решения задач кинематики манипулятора. Прямая задача о положении двухзвенного манипулятора. Решение с помощью матриц винтового смещения и на основе геометрического подхода. Обратная задача о положении двухзвенного манипулятора.
Прямая и обратная задача о скорости двухзвенного манипулятора.
Геометрия рабочего пространства манипулятора Конфигурация рабочего пространства манипуляторов, работающих в декартовой, цилиндрической и сферической системах координат. Геометрия рабочего пространства двухзвенного манипулятора.
/1, с. 25-73, 2, с.245-249, 3, с. 6-53/
1.4 Мехатронные устройства в транспортной и компьютерной технике.
Современный автомобиль как мехатронная система: подсистемы управления двигателем, управления коробкой передач, обеспечения безопасности движения и комфорта.
Состав периферийные устройства компьютеров. Накопитель на жестких несменных дисках как мехатронный объект. Принцип работы и схема системы управления.
Устройство, принцип работа накопителя информации на оптическом диске. Структурная схема системы управления.
/I, с. 74-91/
1.5 Информационные системы мехатронных устройств.
Состав, классификация и основные виды информационных систем мехатронных устройств. Характеристика основных подсистем информационной системы.
Первичные измерительные преобразователи. Классификация датчиков.
Силомоментные датчики: тензометрические, пьезоэлектрические, магнитоупругие. Принцип действия, основные характеристики, область применения.
Емкостные и индуктивные датчики. Принцип действия, основные характеристики, область применения.
Дифференциальное включение датчиков.
Оптические датчики. Принцип действия, основные характеристики, область применения.
Согласование датчиков с вторичной аппаратурой.
Модуляция измерительных сигналов. Характеристика основных видов гармонической и импульсной модуляции.
Дискретизация сигналов по уровню и по времени. Теорема Котельникова.
Кодирование сигналов. Помехоустойчивое кодирование.
Передача измерительной информации по линиям связи. Проводная, радио и оптическая связь. Способы повышения эффективности линий связи
/I, с. 92-121/
1.6 Системы управления мехатронными объектами
Управляемость и наблюдаемость объектов (процессов), способы моделирования мехатронных систем.
Описание управляемых систем во временной и частотной областях. Уравнения состояния динамической системы.
Цель управления и обобщенное представление управляемой системы.
Нелинейные системы. Численное моделирование в задачах управления.
Дискретное описание в пространстве состояний.
Построение структуры системы управления. Структура регулятора с упреждающим управлением. Обоснование необходимости математической модели системы и обратной связи.
ПИД-регулятор.
Синтез цифровых систем управления. Структура цифровой системы управления приводом мехатронного агрегата.
/I, с. 122-141/
1.7 Исполнительные устройства систем мехатроники.
Общие сведения и классификация исполнительных устройств мехатронных объектов.
Электрические, пневматические, гидравлические и пьезоэлектрические приводы. Область применения, достоинства и недостатки.
Электродвигатели углового движения постоянного тока.
Электродвигатели углового движения переменного тока.
Шаговые двигатели. Конструкция и принцип действия реактивно-индукторых двигателей.
Линейные электродвигатели.
/I, с. 142-158, 2, с. 133-159, 3, с.89-101/
1.8 Основы проектирования интегрированных мехатронных модулей и систем
Понятие интерфейса в мехатронных системах. Основные интерфейсы. Сущность и способы решения проблемы интефейсов в мехатронике.
Сравнительный анализ традиционного и параллельного проектирования систем.
Основные этапы параллельного проектирования интегрированных мехатронных агрегатов.
Методы интеграции при проектировании мехатронных систем. Метод исключения промежуточных преобразователей и интерфейсов. Метод объединения элементов мехатронного модуля в едином корпусе. Метод переноса функциональной нагрузки на интеллектуальные (электронные, компьютерные и информационные) устройства.
/1, с. 159-183; 2, с. 87-111, 121-124/.
2 ОСНОВНЫЕ ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
-
Дайте определение терминам: мехатроника, синергетическая интеграция, мехатронные система, объект, модуль, комплекс.
-
Каковы основные преимущества мехатронных устройств?
-
Перечислите основные признаки, по которым классифицируют мехатронные объекты.
-
Изобразите структурную схему мехатронных модулей и мехатронных машин.
-
Какие виды связей между механическими, электротехническими и компьютерными компонентами машины обеспечивают их синергетическую интеграцию?
-
В чем сущность метода стереолитографии?.
-
В чем преимущества машин с параллельной кинематикой по сравнению с традиционными промышленными роботами и металлорежущими станками?
-
Что такое SCADA-системы и CALS-технологии?
-
Изобразите структурную схему промышленного робота.
-
Дайте характеристика роботов 1, 2 и 3-го поколений.
-
Изобразите кинематические схемы манипуляторов, работающих в декартовой, цилиндрической и сферической системах координат.
-
Что представляют собой матрицы винтового смещения для решения задач кинематики манипулятора?
-
В чем разница между прямой и обратной задачами о положении манипулятора?
-
Что представляет собой рабочее пространство манипуляторов, работающих в декартовой, цилиндрической и сферической системах координат?
-
От каких параметров зависит форма рабочего пространства двухзвенного манипулятора?
-
Какие функции выполняет мехатронные подсистемы управления двигателем и коробкой передач современного автомобиля?.
-
Объясните устройство и принцип работа накопителя информации на оптическом диске.
18) Какие функции выполняет информационная систем мехатронных устройств?
19) В чем разница между генераторными и параметрическими первичными преобразователями?
20) Перечислите достоинства и недостатки силомоментных магнитоупругих датчиков.
21) Какова область применения емкостные и индуктивные датчиков?
22) Какие преимущества дает дифференциальное включение датчиков?
23) Что такое оптрон?
24) Перечислите виды гармонической и импульсной модуляции сигналов.
25) В чем сущность и значение теоремы Котельникова?
26) Как обеспечивается помехоустойчивое кодирование сигналов?
27) Выполните сравнительный анализ проводной, радио- и оптической связи.
28) Дайте определение терминам управляемость и наблюдаемость объектов (процессов).
29) Приведите равнение состояния одномассовой линейной динамической системы.
30) Для решения каких задач используется метода Рунге-Кутта и в чем его сущность?
31) Для чего в системах управления необходима математическая модель управляемого объекта и обратная связь?.
32) Приведите уравнение, описывающее ПИД-регулятор.
33) Из каких структурных элементов состоит цифровая система управления приводом мехатронного агрегата?
34) Дайте сравнительный анализ электрических, пневматических и гидравлических приводов мехатронных агрегатов.
35) В чем различие между синхронными и асинхронными электродвигателями?
36) К какому классу электрических машин относится шаговый двигатель?
37) Какой смысл вкладывается в понятие «интерфейс» при проектировании мехатронных систем?
38) В чем состоит сущность проблемы интефейсов в мехатронике?
39) Дайте сравнительный анализ традиционного и параллельного проектирования систем?
40) Перечислите основные этапы параллельного проектирования интегрированных мехатронных агрегатов.
41) В чем состоит метод исключения промежуточных преобразователей и интерфейсов?
42) Какие преимущества дает объединение элементов мехатронного модуля в едином корпусе?
43) Приведите пример переноса функциональной нагрузки на интеллектуальные (электронные, компьютерные и информационные) устройства из области горного машиностроения.
3. ЗАДАНИЯ ДЛЯ РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЫ (КОНТРОЛЬНОЙ РАБОТЫ СТУДЕНТОВ ЗАОЧНОГО ФАКУЛЬТЕТА)
Для студентов дневной формы обучения номер варианта назначается преподавателем. Студенты заочной формы обучения принимают номер варианта задания для контрольной работы самостоятельно по следующим правилам. Последняя цифра номера варианта соответствует последней цифре номера зачетной книжки. Первая цифра номера варианта принимается равной 0, если предпоследняя цифра номера зачетной книжки четная, и 1, если указанная цифра нечетная.
Теоретические сведения, необходимые для выполнения задания приведены в методических указаниях [4].
Для
принятого варианта исходных данных
(см. табл.) построить границу рабочего
пространства двухзвенного плоского
манипулятора при условии
![]() Используя результаты решения обратных
задач о положении и скорости двухзвенного
манипулятора, вычислить значения
обобщенных координат (q1
и
q2)
и
скоростей (ω1
и
ω2)
при прямолинейном равномерном перемещении
схвата из точки А с координатами ХА,YА
в
точку
В с координатами ХВ,YВ
(см.
рис.).
Используя результаты решения обратных
задач о положении и скорости двухзвенного
манипулятора, вычислить значения
обобщенных координат (q1
и
q2)
и
скоростей (ω1
и
ω2)
при прямолинейном равномерном перемещении
схвата из точки А с координатами ХА,YА
в
точку
В с координатами ХВ,YВ
(см.
рис.).
Таблица. Исходные данные
|
№ варианта |
L1, м |
L2, м |
α1, град. |
α2, град. |
Т, с |
ХА,м |
YА,м |
ХB,м |
YB,м |
|
01 |
1 |
0.8 |
80 |
110 |
1 |
1.1 |
0.2 |
0.5 |
1.6 |
|
02 |
1 |
0.7 |
90 |
120 |
1 |
1.15 |
0.4 |
0.7 |
1.4 |
|
03 |
1 |
0.6 |
120 |
100 |
1 |
1.25 |
0.4 |
0.5 |
1.4 |
|
04 |
1 |
0.9 |
45 |
150 |
1.1 |
1.5 |
0.5 |
0.5 |
1.0 |
|
05 |
1 |
1 |
80 |
100 |
1.1 |
1.6 |
0.6 |
0.8 |
1.7 |
|
06 |
0.8 |
0.8 |
30 |
160 |
1.1 |
0.4 |
0.6 |
1.4 |
0.3 |
|
07 |
0.8 |
0.4 |
40 |
160 |
1.2 |
0.6 |
0.3 |
0.7 |
0.8 |
|
08 |
0.8 |
0.7 |
80 |
90 |
1.2 |
0.9 |
1.0 |
0 |
1.2 |
|
09 |
0.8 |
0.6 |
90 |
100 |
1.2 |
0.3 |
1.1 |
0.8 |
0.9 |
|
10 |
0.8 |
0.5 |
110 |
90 |
1.3 |
0 |
1.2 |
0.5 |
1.1 |
|
11 |
0.9 |
0.8 |
90 |
90 |
1.3 |
0.3 |
1.25 |
1.0 |
1.3 |
|
12 |
0.9 |
0.7 |
40 |
150 |
1.3 |
0.8 |
0.8 |
1.4 |
0 |
|
13 |
0.9 |
0.6 |
50 |
120 |
1.4 |
0.3 |
1.0 |
1.3 |
0.4 |
|
14 |
0.9 |
0.5 |
60 |
100 |
1.5 |
1.1 |
0.5 |
0.6 |
1.0 |
|
15 |
0.7 |
0.5 |
80 |
100 |
1.6 |
0.55 |
0.9 |
0.85 |
0.8 |
|
16 |
0.7 |
0.6 |
90 |
110 |
1.7 |
0.2 |
1.0 |
0.7 |
0.7 |
|
17 |
0.7 |
0.4 |
35 |
140 |
1.8 |
0.55 |
0.2 |
1.0 |
0.3 |
|
18 |
0.7 |
0.45 |
45 |
150 |
1.9 |
0.8 |
0.2 |
0.6 |
0.7 |
|
19 |
1.2 |
1 |
60 |
100 |
2 |
0.2 |
1.6 |
1.6 |
1.2 |
|
20 |
1.2 |
0.9 |
50 |
120 |
2 |
0.6 |
1.25 |
1.7 |
1.1 |
|
21 |
1.2 |
0.95 |
40 |
120 |
2 |
1.3 |
0.4 |
2.0 |
0 |
|
22 |
1.2 |
0.8 |
90 |
95 |
2.1 |
1.75 |
0.8 |
1.45 |
0 |
|
23 |
1.2 |
0.85 |
100 |
110 |
2.2 |
0 |
1.6 |
2.0 |
0 |
|
24 |
1.2 |
0.7 |
75 |
120 |
2.3 |
0 |
1.5 |
1.8 |
0.2 |
Время перемещения – Т. Положение cхвата в процессе непрерывного прямолинейного движения между точками А и В может быть представлено отдельными точками с учетом шага квантования по времени Δt , который следует принять равным 0,1 секунды.
Порядок выполнения работы:
1) Построить границы рабочей зоны манипулятора согласно исходным данным.
2) Определить расстояние между точками А и В
![]()
3) Определить скорость движения схвата
V = s / T.
4) Определить проекции скорости на оси системы координат


Рисунок.- Кинематическая схема и граница рабочего пространства двухзвенного манипулятора.
При определении α в среде MathCAD следует пользовать функцией atan2:
![]() .
.
5) Определить текущие значения координат схвата
x = XA + Vxt; y = YA + Vyt; где t = 0, Δt, 2Δt, … T.
6) Определить значения обобщенных координат:
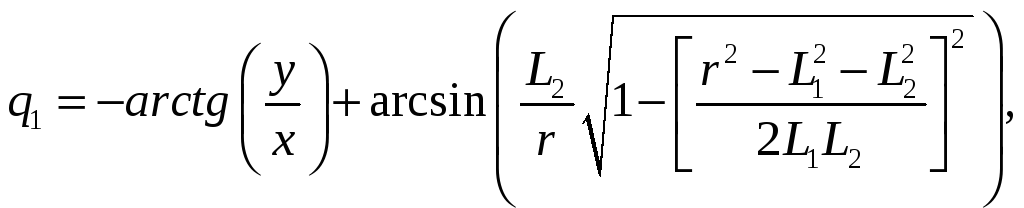

7) Определить значения обобщенных скоростей:

8) Построить графики функций q1(t) , q2(t) , ω1(t) и ω2(t).
9) Выполнить чертеж кинематической схемы манипулятора для двух положений, соответствующих точкам А и В, нанести на него границы рабочего пространства и привести графики полученных зависимостей q1(t) , q2(t) , ω1(t) и ω2(t). Выполнить анализ характера изменения угловых скоростей приводов для обеспечения равномерного прямолинейного движения схвата.
4 КРИТЕРИИ ОЦЕНКИ ЗНАНИЙ СТУДЕНТОВ ПРИ ПРОВЕДЕНИИ МОДУЛЬНЫХ КОНТРОЛЕЙ И ЭКЗАМЕНОВ
В билете по каждому модульному контролю или экзамену имеется два теоретических вопроса. При проверке ответа на каждый вопрос в письменной форме выставляется дифференцированная оценка.
«Отлично» - выставляется в том случае, если студент выявил всесторонние глубокие знания программного материала, показал знание основной и знакомство с дополнительной литературой.
«Хорошо» - выставляется, если при ответе на вопрос студент выявил полные знания программного материала и освоение основной литературы.
«Удовлетворительно» - выставляется, если студент показал знания программного материала, минимально необходимые для дальнейшей учебы и работы.
«Неудовлетворительно» - выставляется, если студент имеет серьезные пробелы в знаниях программного материала, исключающие возможность дальнейшей учебы и работы по специальности.
Общая оценка выставляется как среднее арифметическое оценок, полученных по каждому вопросу. При округлении учитывается также оценка, полученная студентом при сдаче коллоквиума по лабораторным занятиям.
5 СПИСОК РЕКОМЕНДОВАННОЙ ЛИТЕРАТУРЫ
5.1 Основная литература
1. Кондрахин В.П., Стадник Н.И. Конспект лекций по дисциплине «Мехатроника» Донецк, ДонНТУ, 2010.- 183 с.
2. Подураев Ю.В. Мехатроника: основы, методы, применение: Учебное пособие. - М.: Изд-во «Машиностроение», 2006.- 256с.
3. Горобец И.А. Промышленная робототехника. Механические системы манипуляторов. -Донецк.-2001 .- 130 с.
4. Кондрахин В.П. Стадник Н.И. Методические указания к лабораторным работам по дисциплине «Мехатроника» для студентов специальности КПМО дневной и заочной форм обучения /. - Донецк: ДонНТУ, 2010.- 19с.
5.2 Дополнительная литература
1. Введение в мехатронику : Учеб. пособие для студ. спец. «Гидравл. и пневмат. машины», «Прикладная механика», «Инженерная механика» / О.М. Яхно, А.В.Узунов, А.Ф. Луговской и др.- К.: НТУУ «КПИ», 2008.-528 с.
2. Спыну Г.А. Промышленные роботы. Конструирование и применение. Учеб. пособие для студ. машиностроит. спец. / Киев: Вища школа, 1991.- 311 с.