

5.1 Основы автоматического регулирования.
5.1.1 Характеристики регулирования.
Автоматическое регулирование возможно с использованием двух типов характеристик регулирования. Характеристика 1 (рисунок 5.1) отражает астатическое регулирование, сущность которого заключается в том, что при любом отклонении возмущающего фактора (в данном случае реактивного тока нагрузки) регулятор возвращает регулируемую величину (Ur) к одному и тому же исходному (заданному) уровню.
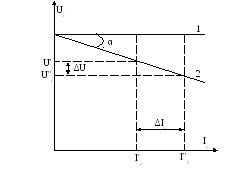
Рис.5.1
Характеристика 2 отражает статическое регулирование, сущность которого в том, что при каждом новом значении возмущающего фактора регулятор поддерживает новое, строго заданное характеристикой значение регулируемой величины. Так при нагрузке Iр напряжение на генераторе поддерживалось равным Uг, а при Iр′ Uг″. Такое регулирование характеризуется коэффициентом статизма, который зависит от угла наклона характеристики и определяется как
![]() .
.
5.1.2 Методы и способы регулирования
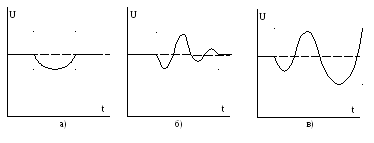
Рис.5.2
Различают следующие методы регулирования:
апериодическое (рис.5.2.а) – регулятор плавно, без перерегулирования подводит регулируемую величину (U) к заданному уровню;
периодическое устойчивое (рис.5.2.б);
периодическое неустойчивое (рис.5.2.в).
Периодическое регулирование имеет место, когда допускается перерегулирование, то есть когда регулируемая величина, достигнув заданного уровня, проскакивает его и регулятор начинает регулирование в обратную сторону. Такое регулирование имеет место при несоответствии постоянных времени регулятора и объекта. При регулировании напряжения регулируется ток возбуждения, но из-за наличия индуктивности эта цепь обладает некоторой инерционностью, определяемой постоянной времени этой цепи, поэтому ток возбуждения, заданный регулятором, устанавливается не сразу, а с некоторым запаздыванием. Это означает, что и напряжение на зажимах генератора восстанавливается не сразу, поэтому регулятор продолжает ощущать отклонения от заданной величины. При токе возбуждения, достаточном для заданного уровня напряжения на зажимах генератора, еще имеется отклонение, и регулятор продолжает увеличивать ток возбуждения. И только после того, когда напряжение вырастает больше заданного уровня, измерительный орган регулятора почувствует отклонение и начинает регулировать в обратную сторону. Чем инерционнее объект регулирования (цепь возбуждения), а регулятор более быстродействующий, тем большее перерегулирование имеет место, тем больше амплитуда отклонения регулируемой величины. При неблагоприятном сочетании этих постоянных времени (не выполняются критерии устойчивости – см. курс «Переходные процессы в энергосистемах», часть 2), регулирование может идти с нарастающим отклонением амплитуды, то есть, возможны потери устойчивости регулирования.
Для обеспечения устойчивости регулирования необходимо влиять на скорость регулирования. Из сказанного выше следует, что при очень малой скорости регулирования перерегулирование будет исключено, а, следовательно, и устойчивость регулирования будет обеспечена. В этом отношении различают следующие способы регулирования:
Пропорционально-импульсное регулирование (рис. 5.3.а), при котором длительность импульса регулирующего воздействия (РВ) пропорциональна отклонению регулируемой величины (из рис. 5.3.а, видно, что с уменьшением отклонения длительность РВ уменьшается), поэтому регулируемая величина периодически приближается к заданному уровню и перерегулирование отсутствует, т.е. устойчивость регулирования надежно обеспечивается, но время регулирования может оказываться недопустимо большим;
Пропорционально-непрерывное регулирование (рис.5.3.б), при котором амплитуда РВ пропорциональна амплитуде отклонения регулируемой величины, что позволяет сократить время регулирования, но приводит к перерегулированию, а в некоторых случаях и к потере устойчивости регулирования;
Комбинированное регулирование (рис.5.3.в), при котором используется суммарное регулирующее воздействие, которое складывается из воздействия, пропорционального отклонению и воздействия, пропорционального скорости отклонения.

Рис.5.3
В этом случае в начальной стадии отклонения регулируемой величины обеспечивается большие регулирующие воздействия, то есть быстрое регулирование, а к концу регулирования, когда регулируемая величина еще не достигла требуемого уровня, меняется знак Рви начинается обратное регулирование, то есть система начинает тормозиться и тем самым предотвращается перерегулирование, а значит и обеспечивается устойчивость регулирования при малом общем времени регулирования. Иногда в регуляторы дополнительно вводится воздействие, пропорциональное ускорению отклонения (во второй производной), что позволяет в еще большей мере использовать описанный эффект.