

2 Вибір тиристорного електроприводу
Основними технічними даними комплектних тиристорних електроприводів є номінальний струм Іном і номінальна напруга Uн .
Номінальний струм електроприводу обирається за струмом ТП і може бути більше номінального струму двигуна. Номінальна напруга ЕП визначається номінальною напругою електродвигуна.
Виходячи з цього за початковими даними двигуна Uн=700 В, Ін=5150 А обираємо систему КТЕУ потужністю 1000 – 1200 кВт.
КТЕУ – 6300/750 – 1362315 – 500Т – УХЛ4
До складу тиристорного ЕП входять електропривод постійного струму з тахогенератором, ТП для живлення якоря двигуна і ТП для живлення обмотки збудження, силовий трансформатор, комутаційна та захисна апаратура (рисунок 2.1).
Для даної системи використовуємо трансформатор ТДТП – 8000/10 У2
Мережева обмотка:
Потужність Р=6110 кВ·А.
Напруга U=6 кВ.
Вентильна обмотка:
Напруга U=750 В.
Струм І=2 · 2570 А.
Перетворювач:
Напруга U=825 В.
Струм І=2 · 3200 А.
Втрати:
Холостого ходу ΔРхх=9800 Вт.
Короткого замикання ΔРкз=6700 Вт.
Напруга короткого замикання Uк %=6.3 %.
Струм холостого ходу Іхх=0.9 %.
Також відповідно даним обмотки збудження обираємо силовий трансформатор TV2 для живлення ТП обмотки збудження з довідника [2] ТСЗП – 250/0.7 У3
Мережева обмотка:
Потужність Р=220 кВ·А.
Напруга U=0.38 кВ.
Вентильна обмотка:
Напруга U=315 В.
Струм І=408 А.
Перетворювач:
Напруга U=345 В.
Струм І=500 А.
Втрати:
Холостого ходу ΔРхх=915 Вт.
Короткого замикання ΔРкз=3400 Вт.
Напруга короткого замикання Uк %=4.4 %.
Струм холостого ходу Іхх=3.6 %.

Рисунок
2.1 – Силова частина електроприводу
серії КТЭУ
при 12-пульсній схемі випрямлення.
3 Визначення параметрів об’єкта регулювання
РОЗРАХУНОК АКТИВНОГО ОПОРУ ЯКОРЯ ДВИГУНА
Активний опір якірного кола:
Rя =βт(Rя 15+ Rдп+ Rком)=1.24·(0.0131+0.00228+0.00606)=0.0266 Ом.
де Rя 15 – опір обмотки якоря при 150С;
Rдп – опір додаткових полюсів при 150С;
Rком – опір компенсаційної обмотки при 150С;
βт=1.24 – коефіцієнт, який враховує зміну опору під впливом температури.
Активний опір фази трансформатору:
![]()
Фіктивний опір, визваний комутацією тиристорів:
![]()
Максимальна ЕРС перетворювача:
тоді
![]()
Активний опір шин та вимірювальних шунтів:
Rш=0.1· RЯ=0.1·0.0266=0.00266 Ом
Повний активний опір якірного кола:
RЯΣ= RЯ+ RТР+ RФ+ RШ=0.0266+0.0017+0.006+0.00266=0.03696 Ом.
ВИЗНАЧЕННЯ ІНДУКТИВНОГО ОПОРУ ЯКІРНОГО КОЛА
Індуктивний опір якірного кола двигуна:
![]()
де К=0.15…0.25 – коефіцієнт ля компенсації машини.
![]()
де т – пульсність перетворювача;
f – частота живильної мережі.
Повна необхідна індуктивність якірного кола:
![]()
де Id гр=0.1·Іd H=0.1·5150=515 А.
![]() –діюче
значення фазної напруги мережі для
живлення випрямовувача.
–діюче
значення фазної напруги мережі для
живлення випрямовувача.
Ud0=Ed0=986 В – ЕРС холостого ходу перетворювача, розрахованого у пункті 3.1
![]()
![]() –конструктивна
стала машини при номінальному потоку.
–конструктивна
стала машини при номінальному потоку.
![]()
Індуктивність згладжуючого дроселя:
LДР=LΣ необ – (LЯД+LТР)=9.29·10-5–(1.3·10–3+10–5)= - 0.00122 Гн
Оскільки LДР<0, тому необхідність встановлення дроселя відсутня.
Повна індуктивність якірного кола:
LЯ= LЯД+ LТР=1.3·10–3+10–5=1.31 мГн
Постійна часу якірного кола:
![]()
ВИЗНАЧЕННЯ ЕЛЕКТРОМЕХАНІЧНОЇ СТАЛОЇ ЧАСУ
Момент інерції:
JΣ= JДВ+ JН= JДВ+ 1.5·JДВ=2.5·JДВ=2.5·35500=88750 кг·м2
Електромеханічна стала часу електроприводу:

РОЗРАХУНОК ОПОРІВ КОЛА ЗБУДЖЕННЯ
Опір обмотки кола збудження:
![]()
Номінальний магнітний поток:
ФН=29·10–2=0.29 Вб
Індуктивність обмотки збудження:
![]()
де wз – кількість витків обмотки;
2р=8 – число полюсів;
ΔФ=ΔФН=0.29 Вб – номінальний магнітний поток, який визначаться за кривою намагнічування машини з довідника [1];
ΔIз=Ізн=455 А – номінальний струм збудження.
Індуктивність розсіювання:
![]()
де Фsн=0.6·(σ–1)Фн=0.6·(1.15-1)·0.29=0.261 Гн – номінальний магнітний поток розсіювання
Стала часу обмотки збудження:
![]()
СИНТЕЗ СИСТЕМИ РЕГУЛЮВАННЯ ШВИДКОСТІ
Систему регулювання швидкості двигуна для спрощення розрахунку розіб’ємо на дві:
по струму якоря;
п
 о
потоку збудження.
о
потоку збудження.
Розрахунок КОНТУРА РЕГУЛЮВАННЯ СТРУМУ ЯКОРЯ
С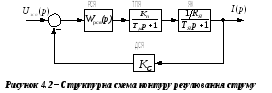 труктурна
схема крся
наведена рисунку 4.2
труктурна
схема крся
наведена рисунку 4.2
Розрахунок КРСЯ ведуть за спрощеною схемою, наведеною на рисунку 4.2, що можливо при наступних припущеннях:
проти–ЕРС не впливає на динаміку електроприводу;
усі малі сталі часу відносять до вентильного перетворювача.
З умови компенсації впливу великих сталих часу та для отримання астатизму 1-го порядку передавальна функція регулятора струму має наступний вигляд:
![]()
де Тс – стала часу інтегрування розімкненого КРСЯ, що за умовами модульной оптимізації дорівнює:
Тс=2·Тμ=2·0.03=0.006 с
де Тμ – мала некомпенсована стала часу, приймаємо Тμ=0.003 с згідно з [2].
Передавальна функція замкненого КРСЯ має вигляд:
![]()
Коефіцієнт зворотного зв’язку за струмом якоря, обираємо таким чином, щоб при максимальному струму давача не перевищувала 10В
![]()
Коефіцієнт підсилювання тиристорного перетворювача
![]()
РОЗРАХУНОК КОНТУРУ РЕГУЛЮВАННЯ СТРУМУ ЗБУДЖЕННЯ
Структурна сема регулювання КРСЗ наведена на рисунку 4.3
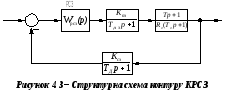
З умови компенсації великих сталих часу приймаємо ПІ-регулятор струму збудження з передавальною функцією:
![]()
Згідно з модульним оптимумом Тсз=2·Тμз=2·0.03=0.006 с (Тμз – мала некомпенсована стала часу).
Коефіцієнт підсилення тиристорного перетворювача у колі збудження:
де Uп мах – максимальна напруга керування СІФК.
Коефіцієнт зворотного зв’язку за струмом збудження
![]()
де Uмах – максимальна вихідна напруга давача.
РОЗРАХУНОК КОНТУРУ РЕГУЛЮВАННЯ ШВИДКОСТІ
С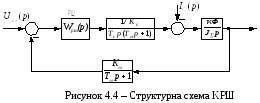 труктурна
схема КРШ наведена на рисунку 4.4
труктурна
схема КРШ наведена на рисунку 4.4
Оскільки треба отримати треба отримати систему без статичного перепаду швидкості, то регулятор швидкості повинен бути ПІ-типу та мати наступну передавальну функцію
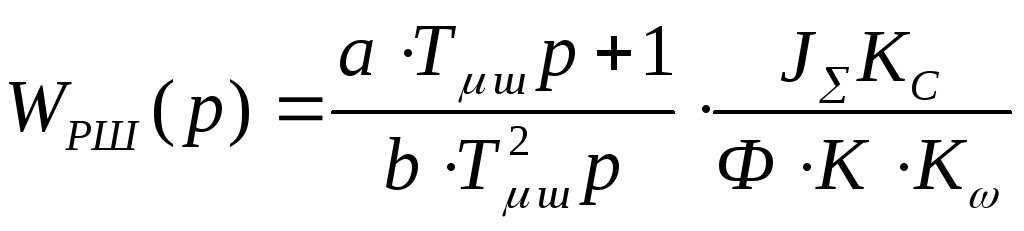
Його настройку слід проводити при максимальному значенні потоку.
У цьому виразі Тμш – стала часу контуру швидкості, що враховує інерційність в каналі зворотнього зв’язку
Тμш=Тс+Тω+Тдн
Ф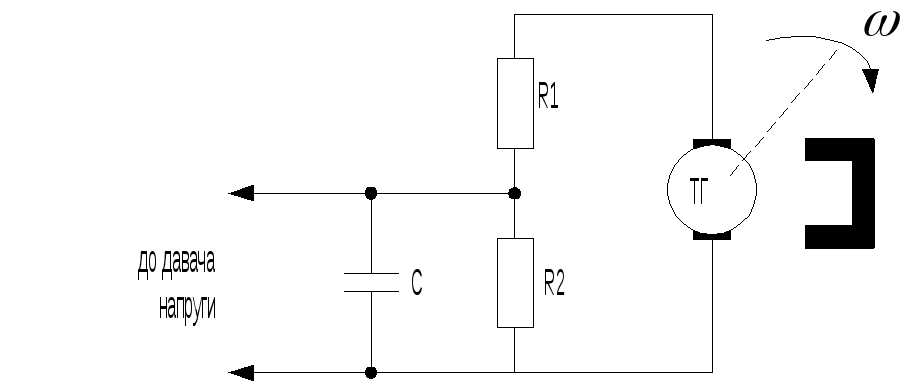 ільтр
за сталою часуТω
встановлюється у каналі зворотноьго
зв’язку за швидкістю для значення
пульсацій на виході тахогенератора.
Це можливо реалізувати за схемою,
наведеною на рисунку 4.5
ільтр
за сталою часуТω
встановлюється у каналі зворотноьго
зв’язку за швидкістю для значення
пульсацій на виході тахогенератора.
Це можливо реалізувати за схемою,
наведеною на рисунку 4.5
Рисунок 4.5 – Реалізація
зворотнього зв’язку за швидкістю
двигуна
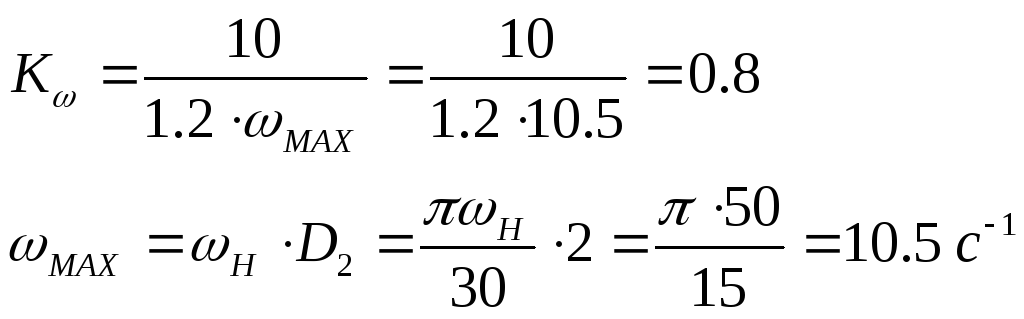
Для системи необхідним є тахогенератор типу ПТ–42 з напругою Uтгн=230 В та швидкістю обертання nтгн=200 об/хв.
Кутова швидкість тахогенератора
![]()
Коефіцієнт передачі тахогенератора
![]()
Необхідний коефіцієнт передачі дільника тахогенератора
![]()
де Umax – максимальна вхідна напруга давача напруги;
ω0 – швидкість ідеального холостого ходу двигуна
![]()
Коефіцієнт зворотнього зв’язку за швидкістю
Для реалізації дільника напруги підбираємо номінали резисторів із стандартного ряду приймаємо
R1=0.917 кОм, R2=10 кОм, С=3 мкФ.
Стала часу фільтра
![]()
Сталу часу давача напруги приймаємо Тдн=0.001 с
Остаточно маємо:
Тμш=Тс+Тω+Тдн=0.006+0.0025+0.001=0.0095 с
При настроюванні ПІ-регулятору швидкості на симетричний оптимум а=4, b=8.
Як видно з структурної схеми КРШ він має нелінійність, тому що магнітний поток змінюється у значних межах. Це можна усунити шляхом лінеаризації КРШ.
РОЗРАХУНОК КОНТУРА РЕГУЛЮВАНЯ ЕРС
С труктурна
схема контуру має вигляд
труктурна
схема контуру має вигляд
Передавальна функція регулятора ЕРС має вигляд:
![]()
де Те – стала інтегрування контуру ЕРС, яка при настроюванні системи за МО має наступне значення
Те =2·Тсз=2·0.006=0.012 с
Коефіцієнт зворотнього зв’язку по ЕРС
![]()
Сигнал зворотнього зв’язку за ЕРС формується за допомогою ЗЗ за струмом якоря.
Коефіцієнт передачі дільника
![]()
де
![]() –
коефіцієнт передачі дільника.
–
коефіцієнт передачі дільника.
Відповідно до цього обираємо:
R1=1.2 кОм, R2=100 кОм.
П риведемо
схему сумування сигналів
риведемо
схему сумування сигналів
Ке=Кня–Кся=Кдв·Кде·Кдн–Кся
![]()
Величина ЕРС залишається полярності протягом роботи, тому необхідно у зворотній зв’язок встановити блок виділення модулю.