

attachments / ШПУ_2012
.pdfПрименение асинхронного двигателя с фазным ротором для привода ШПУ
Высоковольтный АД с ф.р. мощностью 1250 кВт (6кВ)

Применение асинхронного двигателя с фазным ротором для привода ШПУ
Роторные сопротивления для АД с ф.р. мощностью 1250 кВт
ЭП ШПУ с ДПТ
При мощности свыше 1000 кВт подъёмные установки оснащены системами Леонардо (генератор-двигатель). В последние годы системы генератор-двигатель обновлены. В качестве возбудителей в них применяют управляемые выпрямители. Применяются двухконтурные или трёхконтурные системы подчинённого регулирования с задатчиком интенсивности на входе, с ограничением рывка. В связи с появлением систем тиристорный преобразователь − двигатель и большим дефицитом меди было запрещено закладывать в проекты ШПУ системы Г-Д. В порядке исключения для угольных шахт разрешено специальном обоснованием использование системы Г-Д в связи с недостаточной мощностью электрических сетей и шахт. В настоящее время ШПУ на базе ДПТ оснащяются системами ТП-Д. Комплекты такого привода выпускают на Харьковском электромеханическом заводе. Применяют быстроходные ДПТ, требующие применение редуктора. Тихоходные двигатели имеют большой вес (в основном медь), а быстроходные требуют наличие тяжёлого редуктора. Окончательный вывод о том, что дешевле, так и не сделан. Решение принимается в зависимости от коньюктуры рынка.
Электропривод постоянного тока по системе Г-Д
Всистеме Г-Д подъемный двигатель Д получает питание от генератора Г. Регулирование скорости подъемного двигателя и изменение направления вращения производится изменением величины напряжения и полярности на зажимах его якоря.
Ток обмотки возбуждения подъемного двигателя в период его работы остается неизменным и снижается примерно наполовину в период пауз.
Изменение величины напряжения и полярности на зажимах якоря двигателя достигается изменением величины тока и направления его в обмотке возбуждения главного генератора Г.
Взависимости от
источника, от которого происходит изменение величины напряжения и полярности на зажимах ОВ генератора применялись схемы с электромашинными усилителями поперечного поля ЭМУ, с ЭМУ и промежуточным магнитным усилителем, с промежуточным и силовым магнитным усилителем. Сейчас используют схемы с тиристорным преобразователем ОВ.
Электропривод постоянного тока по системе Г-Д
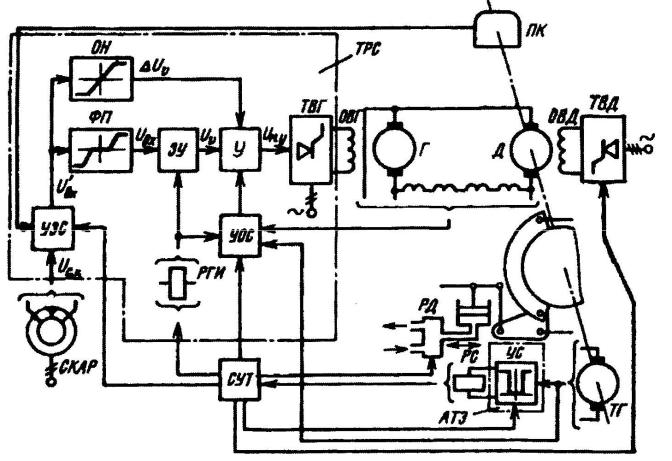
Основным управляющим устройством подъемной машины с приводом по системе Г-Д является выполненный в виде одного блока тиристорный регулятор скорости ТРС, который содержит узел задания направления движения и уставок скорости УЗС с ограничителем напряжения ОН и функциональным преобразователем ФП на выходе, задающее устройство ЗУ, суммирующий усилитель У с узлом обратных связей УОС и тиристорный возбудитель генератора ТВГ.
К выходу ТВГ подключена обмотка возбуждения ОВГ генератора Г. На вход УЗС поступает первичный управляющий сигнал Uс.к от сельсинного командоаппарата СКАР. УЗС вырабатывает сигнал Uвх, полярность которого определяется заданным направлением движения, а величина изменяется ступенчато в результате срабатывания этажных выключателей путевого командоаппарата ПК. Часть этого сигнала (∆Uυ), соответствующая скорости 0,2-0,25 м/с, проходит на вход У через ОН, минуя ЗУ. Сигнал U'вх поступает также на вход ФП, на выходе которого формируется сигнал Uвх, поступающий на вход ЗУ. Зависимость Uвх (U'вх) формируется так, чтобы растянуть зону малых скоростей по дуге перемещения рукоятки управления СКАР и тем самым повысить плавность и точность управления машиной во время выполнения маневровых операций. ЗУ формирует изменяющийся в функции времени сигнал Uυ и выполняется по схеме, предусматривающей программирование ограничения рывка, если это необходимо, либо без него, если в этом нет нужды. Сигналы ∆Uυ , Uυ и поступающие из УОС сигналы обратных связей суммируются усилителем У.
Команда на начало движения поступает в УЗС из схемы управления и технологического контроля СУТ, в которой анализируется информация о ходе процессов разгрузки и загрузки подъемных сосудов. Одновременно СУТ подаст команды: на растормаживание машины – через регулятор давления РД и на увеличение возбуждения двигателя до номинального значения в тиристорный возбудитель двигателя ТВД, питающий обмотку возбуждения ОВД подъемного двигателя Д.
отсутствии достаточного момента на валу двигателя и под действием статического усилия произойдет обратный ход машины. Поэтому при загрузке на весу СУТ подает команду на растормаживание машины после поступления в нее информации о достаточной величине тока якоря и тока возбуждения подъемного двигателя.
Из-за инерционности и нестабильности процесса растормаживания машины ее трогание может сопровождаться значительным рывком. Если растормаживание производить с упреждением, то в зависимости от величины и знака статического усилия возможен кратковременный обратный ход машины, что нежелательно. Чтобы исключить как чрезмерный рывок, так и обратный ход, на период трогания машины вводятся ограничения по заданию скорости и току якоря Осуществляется это содержащимся в ТРС герконовым реле гашения интеграторов
задатчика РГИ, при включении которого обеспечивается Uυ = 0 независимо от величины сигнала Uвх и уменьшается в УОС до требуемой величины уставка токовой отсечки. Снятие ограничений можно производить по времени, давлению в цилиндрах рабочего тормоза, положению привода тормоза, по скорости и току якоря. Наилучшие результаты дает снятие ограничений по скорости и по времени.
наиболее достоверной информацией, свидетельствующей о ее готовности к дальнейшему наращиванию скорости. Для
этого используется чувствительный полупроводниковый усилитель скорости УС с реле РС на выходе. Вход усилителя подключен на напряжение тахогенератора ТГ. Усилитель и реле включаются при скорости 0,1–0,15 м/с, достижение которой обеспечивает сигнал ∆Uυ . Реле РС через СУТ отключает реле РГИ и ограничения снимаются.
Если производится подъем тяжелого груза, то скорость может не достичь порога срабатывания усилителя УС, либо это произойдет с заметной задержкой во времени. Поэтому реле РГИ дополнительно отключается по истечении выдержки времени, отсчет которой начинается в момент подачи команды на растормаживание машины.
Если необходимо произвести остановку машины, то из СУТ подаются команды: в УЗС – на снижение скорости до нулевого значения и в УС — на увеличение уставки отключения до 0,5-0,7 м/с. Когда скорость уменьшится до этой величины, реле РС отпадет и
Особенности синтеза САУ ШПУ на основе систем подчинённого регулирования параметров
Важнейшим вопросом разработки САУ ШПУ является выбор рациональной структурной схемы САУ. Решение этой задачи для системы ГД с тиристорным возбудителем и тиристорный преобразователь − двигатель возможно в такой последовательности:
а) выполнить оценку постоянных времени, разделив их на группы с малыми и большими постоянными времени, затем с учётом определённых упрощений найти характеристическое уравнение и выбрать тип регулятора;
б) выбрать контуры регулирования и типы их регуляторов в связи с выдвигаемыми технологическими задачами, которые можно и необходимо решить применением определённого контура регулирования.
Рассматриваемая система состоит из звеньев с различными постоянными времени. Постоянные времени обозначаются следующим образом: Tμ − постоянная времени тиристорного преобразователя, TГ − постоянная времени обмотки возбуждения генератора; Тя − постоянная времени якорной цепи двигателя, ТМ − электромеханическая постоянная времени двигателя.
Пример: Tμ=0.01 с; ТГ=1…3 с в зависимости от мощности генератора; Тя=0.04..0.09 с в зависимости от мощности двигателя; ТМ=0.3…1.5 с в зависимости от типа машины. В этом ряду малой постоянной времени можно считать Tμ, а большими ТГ, Тя, ТМ. Постоянная времени Тя при её меньших значениях можно было бы отнести к малой некомпенсируемой постоянной времени, но при этом уменьшится быстродействие системы до вступления в действие контуров ограничения, таких параметров как ускорение и рывок. Структура САУ может изменяться в зависимости от включения постоянных времени в один из контуров регулирования. Постоянные времени могут быть объединены в различные контуры регулирования, что и определит структуру САУ.
Особенности синтеза САУ ШПУ на основе систем подчинённого регулирования параметров
Варианты объединения постоянных времени. 1. Двухконтурные системы.
1.1(Tμ, ТГ, ТяГ, ТяД), ТМ − регулирование тока якоря и скорости двигателя.
1.2(Tμ, ТГ, ТяГ), (ТяД и ТМ) − регулирование ЭДС генератора и скорости двигателя.
Вэтих системах типы регуляторов обоих контуров могут быть различными в связи с различными требованиями по ограничению параметров. Если для внутреннего контура
регулирования ставится задача компенсации постоянной времени ТяД и ограничение величины тока якоря, то может быть применён ПИ регулятор тока. Если требуется
ограничение темпов нарастания якорного тока dIя/dt, то должен быть применён ПИД регулятор тока.
2.Трёхконтурные системы.
2.1(Tμ и ТГ), (ТяГ и ТяД), ТМ − регулирование ЭДС генератора, тока якоря и скорости
двигателя.
2.2(Tμ и ТГ), (ТяГ и ТяД), ТМ − регулирование токов якоря и возбуждения, и скорости
двигателя.
Если ставится задача компенсации постоянной времени ТГ, то применяют ПИ регулятор ЭДС. При необходимости ограничивать темп нарастания тока возбудителя
генератора (dIв/dt или duв/dt) должен быть применён ПИД регулятор ЭДС (тока возбуждения). Включение двух больших постоянных времени в один контур регулирования нежелательно, так как при этом теряются свойства раздельного регулирования напряжения
итока. Теряется также возможность ограничения рывка.
В статических системах управления применяют П регулятор скорости.
Особенности синтеза САУ ШПУ на основе систем подчинённого регулирования параметров
При выборе структурной схемы САУ контуров регулирования и типов регуляторов нужно учитывать технологические требования:
а) требование обеспечения программирования движения определяет необходимость применения либо ЗИ с изменяющимися темпами нарастания напряжения на выходе при подачи путевых импульсов либо устройства программирования скорости по пути; б) требование безопасности определяет ограничение максимальной скорости
движения; в) требование выполнения оптимальной диаграммы движения, уменьшение
динамических ошибок регулирования определяет необходимость осуществления в САУ компенсации больших постоянных времени ТГ, Тя и ТМ; в соответствии с теорией подчинённого
регулирования наиболее простым оказалось такое построение САУ, при котором обеспечивается компенсация большой постоянной времени отдельным регулятором и контуром регулирования; из этого вытекает целесообразность
применения для системы ТП-Д трёхконтурных систем для управления приводом ШПУ; г) требование обеспечения высокой статической точности регулирования скорости
определяет необходимость применения двухкратноинтегрирующих систем; при неизменной статической нагрузке на основных периодах разгона и замедления величину ускорения можно ограничивать регулятором тока: Iяmax−IC=const; однако при нагрузках, меньше номинальной ускорение будет больше заданного; чтобы этого избежать, нужно применить регулируемое токоограничение.
Особенности синтеза САУ ШПУ на основе систем подчинённого регулирования параметров
Так как в первый момент подачи управляющего импульса машина неподвижна и обратная связь по скорости не действует, то для ограничения темпа нарастания тока якорной цепи и рывка, в САУ должен быть введён контур регулирования напряжения тиристорного преобразователя или ЭДС генератора. Наиболее часто применяют следующие системы автоматического регулирования:
1. Трёхконтурные. |
|
1) [АП]+[П-РС]+[ПИ-РТ]+[ПИ-РН] − ТГ, Тя |
и ТМ (в каждый контур регулирования входит одна |
постоянная времени). |
|
2) [АП]+[ПИ-РС]+[П-РТ]+[ПИ-РН] − ТГ, Тя |
и ТМ. |
2. Двухконтурные. |
|
1)[АП]+[П-РС]+[ПИ-РТ] − ТГ, Тя и ТМ (компенсируемые постоянные времени).
2)[АП]+ [ПИД-РС]+[ПИ-РТ] − ТГ, Тя и ТМ.
[АП] − устройство автоматического программирования по пути или ЗИ с изменяющимся темпом нарастания напряжения UЗИ при подаче путевых импульсов;