

attachments / ШПУ_2012
.pdfНа подавляющем большинстве подъемных машин в качестве ЭП применяется АД с ФР с реостатом в цепи ротора. Этот привод имеет весьма существенные недостатки. Он не обладает регулировочными качествами, необходимыми для ШПУ. Механические характеристики АД с ФР с реостатом в цепи ротора являются нелинейными, исключают однозначность между положением рукоятки управления и скоростью при различных нагрузках. Неудовлетворительная управляемость, сильная зависимость пониженной скорости от изменения нагрузки неблагоприятны для выполнения рабочих диаграмм ШПУ.
Неудовлетворительным являются и тормозные характеристики АД, так как невозможно осуществление электрического торможения на скорости ниже синхронной при нормальном включении двигателя. Для управления АД подъемной машины вынужденно используются различные характеристики при пуске, разгоне, замедлении и при управлении на промежуточных скоростях.
Применение динамического торможения в значительной степени улучшает управление ЭП, обеспечивает плавность изменения и приложения нагрузок на элементы машины, создает возможность глубокого регулирования скорости при спуске грузов, получения устойчивой пониженной скорости, что упрощает ручное управление приводом.
Практически все подъемные установки с асинхронным приводом с реостатом в цепи ротора управляются машинистом подъема вручную, при этом присутствует и играет большое значение человеческий фактор, который в 90 % случаев является причиной аварий на подъемных установках.
Энергетические показатели ЭП определяются высотой подъема, отношением Vср/Vмакс. продолжительностью работы на пониженных скоростях, отношением времени включения двигателя в цикле ко времени цикла, временем загрузки подъема в течение суток.
Применение асинхронного ЭП на подъемах значительной мощности при увеличенном времени работы на пониженных скоростях характеризуются высокими тепловыми потерями в роторной цепи двигателя и большим расходом электроэнергии.
Асинхронный ЭП имеет низкий соsφ, на скиповых подъемах он составляет 0,6-0,65,
на клетевых 0 35 0 5 в зависимости от особенностей рабочих диаграмм
Электропривод с жидкостным реостатом
Жидкостный реостат предназначен для регулирования скорости вращения ротора электродвигателя, его тока и развиваемого момента. Регулирование происходит при изменении сопротивления электролита между электродами реостата. В качестве электролита применяется раствор соды Na2CO3 в воде. Величина сопротивления такого раствора зависит от его концентрации, температуры и плотности тока, протекающего через него.
Наиболее часто употребляемая концентрация электролита 1-6%-ный раствор кальцинированной соды. В указанных пределах концентрации при изменении температуры электролита от 50 до 70°С сопротивление раствора изменяется в незначительных пределах. В заданных пределах температура поддерживается системой охлаждения. Промышленностью выпускается два типа реостатов — ВЖР-250 и ВЖР-350Р.
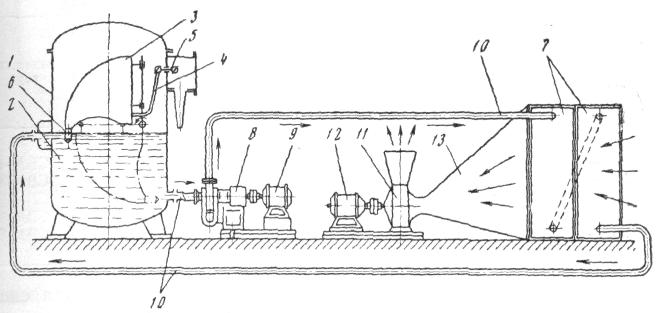
Схема устройства жидкостных реостатов типа ВЖР
Электропривод с жидкостным реостатом
Жидкостный реостат состоит из двух основных узлов: непосредственно реостата и вынесенной системы охлаждения.
Непосредственно реостат представляет собой стальной бак 1, заполненный до определенного уровня электролитом 2. В баке на валу размещены изолированные от вала подвижные электроды 3. К подвижным электродам ток подводится по гибким связям 4 от токоведущих шпилек 5 проходных изоляторов, установленных на стенке бака.
Изменение сопротивления от максимума до минимума происходит при повороте электродов рукояткой на 90°. В крайнем верхнем положении электродов, что соответствует максимальному сопротивлению в цепи ротора, в электролит погружены только концы электродов (съемные контакты) 6.
|
ВЖР – 250 |
ВЖР – 350Р |
|
|
|
|
|
Максимальная мощность |
250 |
350 |
|
управляемого ЭД, кВт |
|||
|
|
||
|
|
|
|
Роторные данные ЭД: |
|
|
|
Напряжение, В |
До 1000 |
До 1200 |
|
Ток, А |
До 400 |
До 450 |
|
|
|
|
|
Охлаждение |
Принудительное с |
||
|
вынесенным |
||
|
теплообменником |
||
|
|
|
|
Тип и сечение подводимого |
СБГ-1000, |
СБГ-1000, |
|
кабеля |
3х150 мм2 |
3х150 мм2 |
|
Вес, кг |
225 |
460 |
|
|
|
|
|

Электропривод с жидкостным реостатом
Электрическая схема реостата ВЖР-350Р
БЭ – блок электродов; БК – блокировочная кнопка; ГШ – гибкие шины; ЭКУ – электроды контроля уровня электролита; ВПЭ – выключатель положения электродов; ДТС – датчик термосигнализатора

ЭП ШПУ на основе высоковольтного АД с металлическим реостатом в цепи ротора
На основе высоковольтного АД с металлическим реостатом в цепи ротора не удается создать систему с единым силовым регулирующим устройством, позволяющим осуществлять без коммутационных переключений регулирование скорости по заданной программе на протяжении всего цикла как в зоне двигательных, так и тормозных моментов. Поэтому функциональная схема содержит несколько замкнутых контуров регулирования, применяемых в разные периоды движения.
Команда на начало движения поступает из узла команд и технологического контроля УКТ, в котором анализируется информация о ходе процессов разгрузки и загрузки подъемных сосудов. УКТ подключает подъемный двигатель ПД контактором В или Н к питающей сети и через аппарат управления скоростью АУС подает команду на растормаживание машины.
Функциональная схема автоматического управления ШПУ с асинхронным ЭП
ЭП ШПУ на основе высоковольтного АД с металлическим реостатом в цепи ротора
Выбор требуемых реостатных характеристик ПД в процессе движения производится с помощью аппарата управления контакторами цепи ротора АУК, на входы которого поступают сигналы действительной скорости Uд от тахогенератора ТГ и тока ic статора ПД от трансформатора тока ТТ. Кроме того, в АУК поступают команды от этажных выключателей путевого командоаппарата ПК. АУК осуществляет включение контакторов У1– У8 в период вывода подъемного сосуда из разгрузочных кривых по скорости и ускорению, в период разгона – по ускорению с отсечкой по току, в период основного замедления в режиме динамического торможения – по скорости.
В периоды основного замедления, движения с промежуточной скоростью, дотягивания и стопорения управляющие команды вырабатывает АУС, который выполняет следующие функция: формирует в функции времени сигнал заданной скорости с ограничением ускорения и рывка, вырабатывает сигнал ошибки по скорости ∆U, управляет регулируемым механическим тормозом через электропневматический или электрогидравлический регулятор давления РД и совместно с УКТ — статорными контакторами В, Н, ДТ подъемного двигателя. На входы АУС поступают сигна-лы: Uд , из УКТ и от этажных выключателей ПК.
Основное замедление производится в режиме динамического торможения или на свободном выбеге, если величина замедления от действия статической неуравновешенности составляет не менее 0,6–0,7 м/с. Регулирование тока динамического торможения производится в функции сигнала ∆U тиристорным выпрямителем ТВДТ, который подключается к статору ПД контактором ДТ.
Движение с промежуточной скоростью и дотягивание производятся в двигательном режиме путем бесступенчатого регулирования момента ПД тиристорным коммутатором ТК в функции сигнала ∆U.
ЭП ШПУ на основе высоковольтного АД с металлическим реостатом в цепи ротора
Механический тормоз в периоды основного замедления, движения с промежуточной скоростью и дотягивания работает в «дежурном» режиме, т. е. вмешивается в процесс регулирования скорости только в том случае, если она по какой-либо причине начинает превышать заданную величину. Подобное выделение целесообразной зоны работы регулируемого механического тормоза облегчается тем, что в рассмотренной функциональной схеме во всех САР скорости используется общий сигнал ошибки по скорости.
Рассмотренные узлы и аппараты составляют основу комплекта аппаратуры автоматического управления скиповым подъемом с асинхронным приводом. Комплект применяется для модернизации электрооборудования действующих подъемных машин.
Применение асинхронного двигателя с фазным ротором для привода ШПУ
Большая часть отечественных установок мощностью 1000−1250 кВт оснащены АД с ф.р., регулирование которого производится ступенчатым изменением сопротивления роторного реостата на металлических резисторах. В угольной промышленности СНГ эксплуатируются около 4000 ШПУ, и 90% из них имеют такой асинхронный привод, не отвечающий не одному из выполненных требований. Подъёмные машины большой мощности оснащались системами генератор-двигатель, и системами ТП−Д и ТПЧ − АД. Разрабатываются новые системы ЭП.
Для подъёмной машины мощностью до 250 кВт применяются низковольтные двигатели, а при больших мощностях − высоковольтные двигатели с обмоткой статора на 6 кВ. Для управления статором применяется воздушный реверсор с высоковольтными или низковольтными контакторами. На всех людских и многих грузовых шахтных подъёмных установках применяется динамическое торможение. Контакторы ускорения управляются машинистом при помощи командоаппарата в функции тока статора с корректировкой по времени, а также в функции ускорения.
АД для привода ШПУ Система ЭП с АД не удовлетворяет почти всем требованиям, изложенным выше.
Особые сложности возникают при автоматизации таких установок из-за нестабильности низких скоростей, которые могут быть получены на очень мягких искусственных характеристиках. Предлагались различные варианты стабилизации скорости дотягивания.
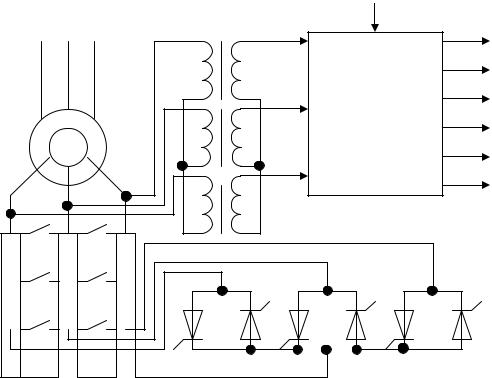
Наиболее широкое применение получили простейшие тиристорные коммутаторы, обеспечивающие стабилизацию скорости дотягивания. Коммутатор, состоящий из трёх пар встречно-параллельных тиристоров VS1−VS6, соединённых по схеме “звезда”, включён параллельно одной из ступеней роторного реостата.
Применение асинхронного двигателя с фазным ротором для привода ШПУ
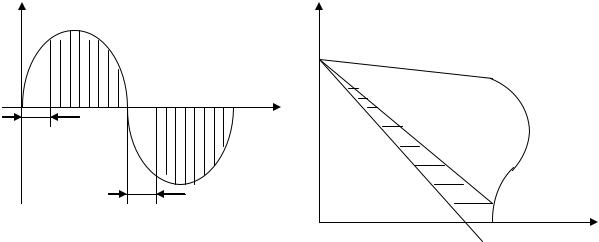
Угол открывания тиристоров изменяется в функции управляющего напряжения Uy. При помощи СИФУ, каждый из трёх каналов синхронизации при помощи трансформаторов TS1, TS2, TS3 за счёт изменения угла открывания тиристоров может быть получена любая из характеристик 1 и 2, однако все эти системы не исключают главного недостатка асинхронных ЭП − низкую экономичность, поскольку любое регулирование скорости связано
спотерями. При любой скорости из сети берётся энергия M·ω0, соответствующая движению
ссинхронной скоростью. Скольжение пропорционально отдаваемой мощности.
|
|
Uу |
|
|
|
|
VS1 |
|
ТS1 |
|
|
|
|
VS2 |
|
|
|
СИФУ |
|
|
|
VS3 |
|
|
ТS2 |
|
|
|
|
VS4 |
|
М |
|
|
|
|
|
VS5 |
|
|
|
|
|
|
ТS3 |
|
VS6 |
VS1 |
VS2 VS3 |
VS4 VS5 |
VS6 |
Схема силовой части АД с тиристорным коммутатором в цепи ротора |
|||
Применение асинхронного двигателя с фазным ротором для привода ШПУ
Iтк |
ω |
|
ωt |
α |
1 |
|
|
|
2 |
α |
М |
Характеристики АД с тиристорным коммутатором в цепи ротора