

attachments / ШПУ_2012
.pdf2. Предусматривать остановку подъемных сосудов в промежуточных точках ствола (режим отбоя), если по условиям эксплуатации их нельзя останавливать в крайних положениях на длительный промежуток времени. Рекомендуется поднимаемый сосуд останавливать на отбой перед разгрузочными кривыми. Если в зимнее время это неприемлемо по причине
обмерзания сосуда и его содержимого, то следует дополнительно предусматривать возможность постановки подъемных сосудов на отбой в теплой части ствола.
3.При автоматическом управлении должна существовать принципиальная возможность проходить отдельные участки ствола на пониженной скорости, если по условиям эксплуатации в этом возникает необходимость.
4.Необходимо предусматривать выборку слабины каната до начала периода движения, если загружаемый подъемный сосуд устанавливается на посадочные брусья.
5.Полностью использовать возможности ЭП подъемной машины для формирования
близкой к оптимальной диаграммы скорости (т. е. обеспечивающей максимальную производительность при условии
непревышения допустимого уровня динамических нагрузок в элементах подъемной установки).
6.Если подъемная установка оборудована загрузочным устройством с секторным затвором, который открывается под действием веса опускающегося скипа, то в момент посадки скипа на педаль его скорость должна составлять не более 0,5-0,6 м/с. Если скип в период дотягивания не имеет механического контакта с загрузочным устройством, то скорость дотягивания в зависимости от возникающих в разгрузочных кривых динамических усилий принимается в пределах 0,7-1 м/с.
7.Минимальный путь дотягивания подъемных сосудов необходимо принимать в зависимости от конструкции загрузочно-разгрузочных устройств и самих сосудов. В реальных
условиях всегда наблюдается разброс точки начала дотягивания, что вынуждает увеличивать путь дотягивания сверх минимальной величины. Одной из причин разброса является погрешность (нестабильность) пути основного замедления подъемных сосудов, обусловленная различной величиной статического усилия. Эта погрешность должна составлять не более 1 м.
Современные САР скорости позволяют получить и более высокую точность регулирования, однако это не дает сколько-нибудь заметного увеличения производительности подъемной установки, так как сохраняется разброс точки начала дотягивания, обусловленный действием прочих факторов
неточность срабатывания этажных выключателей и др.), устранение которых требует существенного усложнения САУ.
8. Точность остановки подъемных сосудов в конечных положениях должна быть достаточной для их надежной разгрузки при полном исключении случаев срабатывания
выключателей переподъема. Для соблюдения установленных норм выключатели настраиваются на срабатывание при переподъеме в 0,4-0,5 м. В этих условиях для скипов допустимое отклонение от нормального положения в месте разгрузки должно составлять до +300 мм с учетом разброса точки срабатывания выключателя стопорения, пути стопорения и приподнимания скипа после разгрузки вследствие уменьшения величины упругой деформации канатов. Поэтому величина пути стопорения по экспериментальным данным не должна превышать 50100 мм. При использовании качающихся площадок отклонение подъемных сосудов от нормального положения должно составлять до ±100 мм.
9. Перед стопорением снижать скорость до 0,3–0,4 м/с, т. е. вводить дополнительную (посадочную) ступень скорости для обеспечения требуемой точности остановки подъемных сосудов в конечных положениях и снижения динамических нагрузок при посадке опускаемого сосуда на брусья и в момент стопорения машины механическим тормозом. Переход на посадочную
скорость происходит в результате срабатывания этажного выключателя путевого командоаппарата, а команда на стопорение машины поступает от датчика, установленного на копре (или в стволе). При точной настройке этажного выключателя стопорение машины механическим тормозом происходит сразу же после перехода на посадочную скорость. Однако вследствие различной величины упругой деформации канатов поднимаемого
сосуда и разброса точки срабатывания этажного выключателя движение с посадочной скоростью может происходить на участке пути до 1 м. Чтобы при этом не происходило сколько-нибудь заметного увеличения продолжительности цикла из-за статического падения скорости, она должна поддерживаться с точностью до ±0,05 м/с. На подъемных установках с асинхронным ЭП при перегоне порожних сосудов или значительном их недогрузе обеспечить поддержание скорости с такой точностью затруднительно и для этого сравнительно редкого случая может быть допущено увеличение скорости на 0,15 м/с. В результате путь стопорения возрастает, но это частично компенсируется отсутствием явления приподнимания сосуда после разгрузки.
10. Система управления ЭП должна допускать дозирование с приемлемой точностью момента подъемного двигателя при заторможенной машине, т. е. момент должен быть однозначной функцией перемещения рукоятки управления. Потребность в подобном дозировании возникает,
если необходимо переместить подъемный сосуд на небольшой участок пути (иногда в несколько сантиметров), а даже незначительный обратный ход недопустим (например, при выполнении ремонтных работ в стволе с подъемного сосуда или разбуривании вагонеток в клети). В этом случае машинист создаст необходимый для предотвращения обратного хода двигательный момент, а затем постепенно растормаживает машину.
11. Производительность подъемной установки при автоматическом управлении должна быть не ниже максимальной часовой производительности при ручном управлении машиной наиболее опытным машинистом этой установки.
Аппаратура управления, ее конструктивное исполнение и размещение в здании подъемной машины должны удовлетворять следующим требованиям:
1.Вся аппаратура управления, защиты, стволовой и технологической сигнализации, устанавливаемая в здании подъемной машины, должна иметь комплектное исполнение и размещаться в блоке шкафов за исключением пульта управления, роторной станции, роторных сопротивлений и аппаратов, кинематически связанных с подъемной машиной.
2.Релейно-контакторную аппаратуру целесообразно применять на постоянном токе, так как по сравнению с аппаратурой на переменном токе она имеет более высокую надежность. Чтобы свести к минимуму сбои в ее работе, величина напряжения, коммутируемого открытыми контактами, должна составлять, как правило, не менее 220 В. Для коммутации слаботочных цепей рекомендуется применять герконовые реле, имеющие высокую надежность и небольшие габариты.
Каждый из силовых регулирующих аппаратов должен содержать не более одного компактного легкозаменяемого блока управления. Электрические соединения внутри блока
должны выполняться пайкой, без разъемных узлов. При этом в результате резкого сокращения объема внешней
коммутации и числа разъемных соединений существенно повышается надежность аппаратуры и практически отпадает задача поиска неисправного блока, которая для обслуживающего персонала невысокой квалификации представляется достаточно сложной даже при наличии системы индикации неисправностей.
3.Иметь минимальное число регулировок, используемых для настройки аппаратуры
после монтажа на объекте. Обилие регулировок усложняет процесс настройки и увеличивает вероятность неправильных действий со стороны обслуживающего персонала.
4.Трудовые затраты на пусковую наладку аппаратуры должны быть небольшими. В противном случае стоимость пусковой наладки оказывается чрезмерно высокой и может даже превысить первоначальную стоимость налаживаемой аппаратуры.
5.Блок шкафов управления целесообразно размещать по возможности в пределах прямой видимости от пульта управления. Это существенно облегчает процесс наладки и обслуживания электрооборудования.
Аппараты и схемы защиты, блокировки и сигнализации должны удовлетворять следующим требованиям:
1.Электрические схемы следует строить по возможности с максимальным самоконтролем, чтобы нарушения исправности отдельных элементов (потеря цепи в контактах, обрыв в катушках реле или соединительных проводах, выход из строя резисторов, диодов и т. п.) не приводили к возникновению аварийной ситуации.
2.Система защит и блокировок должна контролировать работу подъемной установки, по крайней мере, с двойным перекрытием, т. е. выход из строя какого-либо защитного устройства еще не должен приводить к возможности возникновения неконтролируемого аварийного режима.
3.Защитное или блокировочное устройство должно реагировать на отклонение от нормального режима работы независимо друг от друга, т. е. выход из строя одного из них не должен сказываться на работе другого. Например, магнитные выключатели стопорения и переподъема не должны срабатывать от общего магнита, так как в случае его сбивания падающими в ствол кусками горной массы будут выведены из работы сразу оба выключателя.
4.Вероятность срабатывания защитного устройства по ложным причинам или вследствие его чрезмерной чувствительности к контролируемому параметру должна быть
сведена практически к нулю, так как подобные срабатывания побуждают обслуживающий персонал загрубить «на глазок» или даже
полностью заблокировать работу устройства.
5.Сложные защитные устройства должны иметь моноблочную конструкцию небольших габаритов и легко заменяться резервными.
6.Для облегчения поиска сработавшего защитного устройства целесообразно применять индикаторы срабатывания защит, по возможности электрически не связанные с цепью защиты.
Общие требования к ЭП ШПУ
Электрооборудование подъёмной установки относится к классу IX (группа А) − этому соответствует вероятность работы на промежутке времени 720 ч P=0.95, средняя наработка на отказ: Тотк=15000 ч, при времени восстановления (времени ремонта tрем=0.5 ч,
времени простоя после аварии tавар=0.5 ч и времени работы в сутки tрабсут=15…18 ч. Техническая целесообразность и экономичность эффективного регулируемого
привода почти во всём диапазоне мощностей доказана.
Выбор системы управления зависит от глубины подъёма, типа подъёмной машины, подъёмного сосуда, количества горизонтов и расстояния межу ними.
ЭП подъёмной установки должен обеспечивать:
а) работу с пониженной скоростью от 0.3 до 1 м/с при снятии сосуда с жёстких посадочных устройств;
б) замедление подъёмных сосудов, не превышающих 1 м/с2 для всех типов вертикальных и наклонных установок;
в) ограничение ускорений величиной 1 м/с2 для людских подъёмов, а для грузовых подъёмов они определяются проектированием;
г) отсутствие проскальзывания каната по футеровке на всех участках движения
сосудов;
д) устойчивую максимальную скорость при равномерном ходе независимо от нагрузки на валу двигателя и направления движения;
е) движение сосудов с пониженной скоростью при дотягивании, в результате чего должна быть скомпенсирована погрешность системы регулирования.
Для клетевых подъёмов жёстким закреплением концов канатов на барабанах путь дотягивания определяется только абсолютной ошибкой регулирования по пути в процессе замедления. Для скиповых подъёмов путь дотягивания определяется ошибкой по пути в процессе замедления и величиной пройденного пути движения скипа в разгрузочных кривых.
Общие требования к ЭП ШПУ
Путь движения с пониженной скоростью со шкивом трения для клетевых подъёмов определяется абсолютной ошибкой регулирования по пути в процессе замедления и максимально возможным упругим проскальзыванием каната. Для скиповых подъёмников со шкивом трения путь дотягивания увеличивается из-за движения сосуда в разгрузочных кривых, т.о., для клетевых барабанных ШПУ необходимо принимать равным 0.5…1 м, для клетевых со шкивом трения − 1…1.5 м, для скиповых барабанных − 2.5…3.5 м, для скиповых со шкивом трения − 3…3.5 м.
Наилучшей САУ для ШПУ является система с ограничением рывка и ускорения. Во всех системах автоматического управления приводом ШПУ с заданием программы движения в функции времени можно считать возможным достижение требуемого режима без дополнительной корректировки диаграммы скорости по пути только в период разгона.
Период замедления, как показывает опыт эксплуатации ШПУ, применение дискретного в отдельных точках или непрерывного контроля движения подъёмного сосуда по пути является обязательным.
Обеспечение необходимой точности остановки сосудов на многогоризонтных клетевых установках усложняется из-за изменения нагрузки от одного знака номинала до другого при подходе клети к заданному уровню с двух сторон. При очень больших глубинах упругая деформация канатов столь значительна, что механические устройства не могут обеспечивать её компенсацию, поэтому следует отдать предпочтение регулированию положения подъёмного сосуда посредством ЭП, создающего электромагнитный момент для управления положением сосуда на весу (так называемая плавающая подвеска).

Унифицированная тахограмма движения ШПУ
Максимальную скорость для подъёма выбирают для ряда исполнений установок с учётом максимально допустимых vmaxдоп, и оптимальных величин vmaxопт скоростей. Оптимальные величины максимальной скорости vmaxопт и ускорения аmaxопт применяются в соответствие с ранее допустимыми рекомендациями, а для клетевых ШПУ выдерживают правила безопасности:
|
|
|
|
|
= |
0,4...0,5 H |
|
|
для скипа |
ν |
мах.опт |
п |
|||||
|
|
|
= 0,8 H |
|
||||
|
|
|
ν |
мах.доп |
п |
|
||
|
|
|
|
|
|
|||
для клети |
|
νмах.кл.опт ≤12 |
|
|
||||
Эти параметры нормируются правилами безопасности.
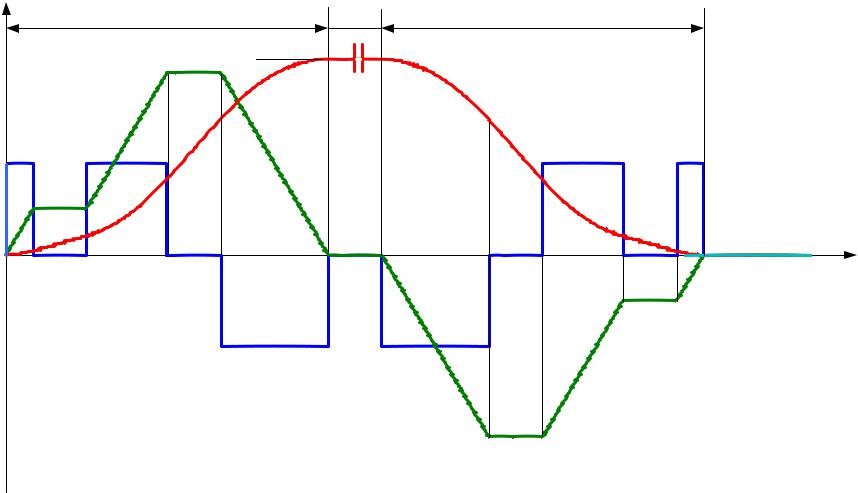
Цикл подъёма должен осуществляться по оптимальной диаграмме движения с ограничением ускорения и рывка. Рекомендуется при разработке и внедрении современных систем ЭП и автоматики ШПУ применять унифицированную диаграмму скорости (рис.). Принятие унифицированной пятипериодной диаграммы движения основывается на необходимости аналогичности применения всех типов исполнений ШПУ. Осуществление трёх периодов движения во всех диаграммах не вызывает сомнения: основного периода разгона, движения с установившейся скоростью и основного периода замедления. В любой диаграмме скорости применяют период с установившейся сниженной скоростью vдот, на которой компенсируются ошибки управления скоростью в течении всех предыдущих периодов и дополнительно для скиповых машин ограничиваются нагрузки на разгрузочные кривые.
|
|
Унифицированная тахограмма движения ШПУ |
||
|
t р |
tу |
tз |
|
ρ, a,ν |
|
νmax |
|
|
|
amax |
|
|
|
ρmax |
ρmax |
|
ρmax |
ρmax |
|
|
|
|
t |
|
|
− ρmax |
− ρmax |
|
|
|
|
−amax |
|
|
Унифицированная диаграмма движения ШПУ |
|
||
Унифицированная тахограмма движения ШПУ
Для клетевых подъёмных машин обеспечивается комфортность подхода к консольной точке пути, а для многоканатных машин компенсация переползания каната относительно ведущего шкива. Заданная унифицированная диаграмма движения допускает изменение величин v, a, ρ, изменение всех периодов времени t, но с ограничением этих величин в соответствии с технологией и правилами безопасности. Возможность и целесообразность использования унифицированной пятипериодной тахограммы движение является единственным условием универсальной системы автоматического управления ШПУ. Унифицированная диаграмма является оптимальной. Поставленные к ней требования по ограничению величин v, a, ρ дополняются следующими условиями:
vóñò.îïò ≤ vóñò.äîï |
||
|
≤ amax.äîï |
Hп − полный путь движения сосудов, |
aîïò |
||
|
≤ρmax.äîï |
∆h − путевая ошибка. |
ρîïò |
|
|
|
≤ Hï .max ± |
h |
Hï |
||
Для клети и скипа путевые ошибки принимаются: hêë = ±0.04 ìì,
hñê = ±0.02 ìì .
Скорость дотягивания должна быть стабильной от цикла к циклу. Столкновение клети с жёсткими упорами при vдот>vдот.доп оказывается опасным для жизни.
Унифицированная диаграмма не изменяясь качественно, может варьироваться по величине разных параметров. При разъезде между далеко отстающими горизонтами для компенсации ошибки по пути диаграмма может дополниться промежуточной корректировочной скоростью с теми же ограниченными параметрами v, a, ρ.
Требования к системе регулирования подъёмного сосуда на заданном уровне (плавающая подвеска)
Точная остановка подъёмных сосудов может быть выполнена на основе выравнивания подъёмного сосуда на заданном уровне посредством ЭП и датчика положения, который при ходе сосуда выше или ниже заданного положения выдаёт непрерывно изменяющийся сигнал управления знака и величины, необходимых для обеспечения действия ЭП на возвращение сосуда на заданный уровень. Основными необходимыми элементом должен быть датчик положения сосуда, основанный на непосредственном определении положения подъёмного сосуда на уровне загрузки-разгрузки, а также устройство включения системы автоматического управления в конце движения на скорости дотягивания.
На процессы в САУ оказывают влияние вид и параметры путевой характеристики датчика положения подъёмного сосуда. Характер изменения напряжения датчика определяет ограничение параметров движения (ускорения и рывка). Величины a и ρ определяются не только условием ограничения усилий в электромеханическом оборудовании, но также и физиологическим воздействием на людей. По последнему ограничению величину ρ ограничивают временем реакции человека tp на возникновение ускорения а. Из этого условия допустимая величина рывка равна: ρ=2.5…5 м/с3 при а=0.5…1 м/с2 и tp=0.2 c. При этих ограничениях обеспечивается достаточно спокойное движение (без неприятных ощущений человека). Учёт производных по пути выше третьей практического значения не имеет. Для уменьшения путевой ошибки выравнивание подъёмного сосуда может быть использована корректировка характеристики положения по статической нагрузке. Для этой цели применяются устройства измерения статической нагрузки, выполненные на основе вычитания из полного тока его динамической составляющей, или на основе измерения упругой деформации каната. При больших значениях упругой деформации каната применяются системы регулирования положения подъёмного сосуда в процессе загрузкиразгрузки посредством ЭП обязательно.