

attachments / ШПУ_2012
.pdfКлассификация шахтных подъёмных установок по назначению и конструктивному исполнению
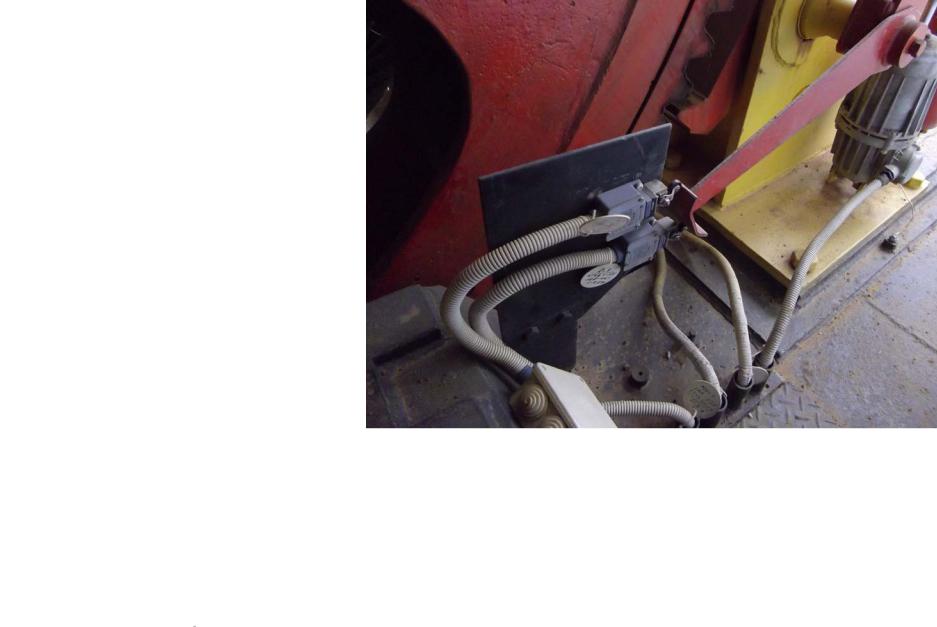
Маневровый тормоз на быстроходном валу с гидротолкателем (Р=0,25кВт)
Пружины колодочного тормоза
Гидронасос Р=18,5кВт, электрогидроаккумулятор
Требования к ЭП ШПУ, нормируемые правилами безопасности
Правилами безопасности нормируются следующие параметры предохранительного торможения.
-время от момента срабатывания защиты до соприкосновения тормозных колодок
стормозным ободом (так называемое время холостого хода) − не более 0.3 с;
-время срабатывания тормоза (время от момента срабатывания защиты до момента достижения тормозным усилием значения, равного статической нагрузке) − не более 0.8 с;
-замедление, которое возникает при предохранительном торможении, должно лежать в пределах (0.5…5) м/с2;
-замедление, которое возникает при предохранительном торможении для многоканатных подъёмных машин должно быть не более 3 м/с2. Для того, чтобы исключить проскальзывание каната по футеровке (расчётный коэффициент трения f=0.25).
-после остановки машины предохранительный тормоз должен развивать усилие не менее трёх статических от номинального груза (FT=3·FСТН).
Правила безопасности требуют, чтобы предохранительный тормоз воздействовал непосредственно на орган навивки.
Правилами безопасности нормируются также:
-максимальная скорость перевозки людей − 12 м/с;
-максимально допустимая скорость подхода подъёмного сосуда к крайнему положению для груза − 1.5 м/с;
-максимально допустимая скорость подхода подъёмного сосуда к крайнему положению для людей − 1.5 м/с.
Требования к ЭП ШПУ, нормируемые правилами безопасности
Храповой механизм - зубчатый
механизм для преобразования возвратновращат. движения рычага в прерывистое вращат. движение храпового (зубчатого)
колеса промежуточным звеном (собачкой), поворачивающим храповое колесо только в
одном направлении. X. м. применяют в качестве задерживающего устройства (напр., в грузоподъёмных машинах) или для получения периодич. врашат. движения в одном направлении с остановками (напр.,
механизмы подачи в автоматич. линиях).

Расчёт мощности для ЭП ШПУ
Зависимость скорости подъёмного сосуда от времени или от пройденного пути называется тахограммой подъёмной установки. Рабочая тахограмма скиповой подъёмной установки может содержать от четырёх до семи периодов. Это обусловлено конструкцией скипа и условиями разгрузки. Скип обычно разгружается через боковое отверстие, закрываемое секторным затвором. Загрузка скипа производится через верхнее отверстие, не имеющее затвора. Для того, чтобы в верхнем крайнем положении скип разгружался в приёмный бункер, необходимо открыть секторный затвор. Для этого он снабжён роликами, которые взаимодействуют со специальными направляющими, закреплёнными неподвижно в районе бункера (так называемые направляющие кривые).
В результате такого взаимодействия затвор поворачивается вокруг оси и открывает отверстие скипа над бункером. Когда скип идёт вниз, ролики затвора в обратном направлении катятся по направляющим, перемещая затвор в положение “закрыто”.
При взаимодействии роликов с кривыми скорость должна быть в пределах от 0.3 до 0.5 м/с. Этим обусловлен участок малой скорости в начале тахограммы и в её конце. Последний также необходим для точного стопорения скипа.

Классификация шахтных подъёмных установок по назначению и конструктивному исполнению
Скип «лежа»

Расчёт мощности для ЭП ШПУ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ν |
|
|
|
|
νmax |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При |
рассмотрении |
|
|
тахограммы |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
участками при |
разгоне |
от |
|
|
|
ар |
|
|
|
|
аз |
|
|
|
|
|
|
|
|
|
||||||||||||||
нулевой |
|
скорости |
до |
|
скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
дотягивания и при замедлении от |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
скорости |
дотягивания |
|
до |
нуля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
пренебрегают ввиду их малости. |
|
νдот |
|
|
|
|
|
|
|
|
|
|
νдот |
|
|
|
|
|
||||||||||||||||
Пауза |
|
|
|
между |
|
|
|
|
циклами |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
||||||
принимается равной в секундах, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
грузоподъёмность |
|
|
скипа |
|
в |
|
t1 |
|
t2 |
|
t3 |
|
|
t4 |
|
|
t5 |
|
tп |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
тоннах. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tц |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для клетевых подъёмных |
|
|
Пятипериодная тахограмма скиповой подъёмной установки |
|||||||||||||||||||||||||||||||
установок часто принимают |
|
|
|
ϑ |
|
|
|
|
νmax |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
более простую трёхпериодную |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
тахограмму |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Отдельные периоды тахограммы |
|
ар |
|
|
|
|
|
|
|
|
аз |
|
|
|
|
|
||||||||||||||||||
рассчитываются следующим образом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
t1 = t5 = |
hуст |
t2 = tц = |
|
v |
max |
−v |
дот |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
vдот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
h3 |
a |
|
|
t1 |
|
|
|
|
t2 |
|
|
|
|
|
t3 |
|
|
tп |
|
|
t |
||||||||||||
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
a |
|
= a |
|
|
= a, |
|
t |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
p |
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
tдвиж |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
vmax |
|
|
|
|
|
|
|
|
tц |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
h3 = H−(h1+h2 +h4 +h5 ), |
|
|
|
|
Трёхпериодная тахограмма подъёмной установки |
||||||||||||||||||||||||||||

Расчёт мощности для ЭП ШПУ
tц = t1+ t2 + t3 + t4 + t5 + tп |
tп =G 10−3 |
tп − время паузы (с), |
|
||||||||||||||
hдот =5...6 |
vдот =0.3...0.5 |
|
|
|
|
||||||||||||
|
|
|
vдот − скорость дотягивания (м/с), |
|
|||||||||||||
|
|
|
|
|
3600 |
|
hдот − высота дотягивания, |
|
|||||||||
Годовая производительность ШПУ: |
A = |
NtcG, |
G − масса полезного груза (кг). |
|
|||||||||||||
|
|
||||||||||||||||
N=300 − число рабочих дней в году, |
|
tц |
|
|
|
Jм |
|
||||||||||
|
|
|
|
D |
|
||||||||||||
tc=18 ч − число рабочих часов в сутки. |
|
|
|
|
|||||||||||||
|
|
|
m |
|
|
|
|
|
|
|
Jд |
||||||
|
|
|
|
|
|
|
|
|
|
i |
|||||||
Усилие, возникающее на окружности органа |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Jред |
|
|||||||
навивки подъёмной машины будет равно: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
F = F −F , |
F = KGg+(p−q)(H−2X)+ m dv |
Н – Х |
|
|
|
|
|
|
|
|
|||||||
1 |
2 |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
K=1.15…1.2 − коэффициент вредных сопротивлений |
|
F |
G |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
движению подъёмного сосуда; |
|
|
|
|
|
|
|
|
Gc |
|
Х |
|
|||||
p, q − погонная масса головных и уравновешивающих |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
канатов (кг/м); |
|
|
|
|
|
|
|
|
|
|
|
|
|
Н |
|
||
g=9.81 м/с2 − ускорение свободного падения; |
|
|
|
|
|
|
|
|
|
|
|
||||||
H − полная высота подъёма (м); |
|
|
|
|
Х |
F1 F2 |
|
|
|
|
|
||||||
X − координата подъёмного сосуда (м); |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
q |
|
|
|
|
Gc |
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||||
m − приведённая к радиусу навивки масса всех |
|
|
|
|
|
|
|
|
|||||||||
вращающихся и поступательно движущихся |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Н – Х |
|
|||||||||
элементов (кг). |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Это уравнение в теории ШПУ называют уравнением Фёдорова М. М., по имени автора, предложившего его.

Расчёт мощности для ЭП ШПУ
Это уравнение учитывает статические и динамические нагрузки, и может быть использовано для построения графика нагрузки, но для вычислений необходимо знать параметр ротора двигателя Jдв (его момент инерции), чтобы учесть его при вычислении приведённой массы m. Это можно сделать, имея конкретный двигатель, а для его выбора необходима диаграмма нагрузки. Поэтому вначале определяют ориентировочную мощность двигателя по формуле:
P= Gvmax g kзап, 1000 ηд
ηд=0.98 − КПД двигателя, kзап=1.2…1.25 − коэффициент запаса.
Затем выбирают по каталогу ближайший больший по мощности двигатель, и с учётом момента инерции ротора определяют суммарную приведённую массу установки:
|
4J |
м |
|
4Jред |
|
4J |
i2 |
|
|
m =Gg+2Gq+2Hpq+ |
|
+ |
|
+ |
дв |
|
, |
||
(Dм)2 |
(Dм)2 |
(Dм)2 |
|||||||
|
|
|
|
||||||
Jм, Jp, Jдв − моменты инерции подъёмной машины, редуктора, электродвигателя (приведённые к тихоходному валу);
Dм − диаметр барабана (м).
Формула (*) приведена для случая полного уравновешивания, когда p=q.
Расчёт мощности для ЭП ШПУ
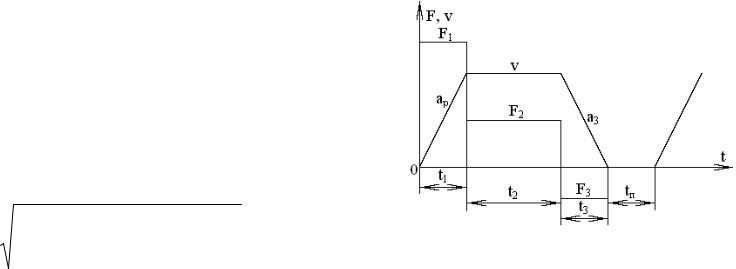
Затем пользуясь уравнением Фёдорова, строят диаграмму усилий:
F1 = Gg+map
F2 = Gg
F3 = Gg−ma3
По диаграмме усилий определяют эффективное (среднеквадратичное) усилие на окружности радиуса навивки:
F |
= |
(F )2 t |
+(F |
)2 t |
2 |
+(F )2 t |
3 , |
|
1 1 |
2 |
|
3 |
|
||||
ýô |
(t1+ t3 )α+ t2 + tï β |
|
Диаграмма усилий |
|||||
|
|
|
||||||
α=0.66, β=0.33 − коэффициенты, учитывающие ухудшение условий охлаждения при пониженной скорости или стоянке. α=β=1, если охлаждение принудительное.
Далее определяют номинальное усилие двигателя, приведённое к радиусу навивки:
F |
= |
9550Pномiηред , |
P |
(кВт) и n |
|
(об/мин) − номинальные параметры двигателя. |
|
дв.ном |
|
nн(Dм/ 2) |
|
н |
|||
|
|
н |
|
|
|||
|
|
|
|
|
|
||
Если Fэф≤Fдв.ном, то выбранный двигатель проходит по нагреву.
Проверка двигателя по перегрузочной способности:
F1 |
≤ λдв, |
λдв =1.8...2.2. |
|
Fдв.ном |
|||
|
Расчёт мощности для ЭП ШПУ
Для ЭП на базе АДфр важным является правильный выбор величины замедления. Тормозной режим такого двигателя при ω<ω0 может быть реализован в режиме динамического торможения или при помощи механического тормоза, что в обоих случаях связано с потерей энергии. Необходимо правильно выбрать a3 так, чтобы обеспечить F3=0. Это возможно при замедлении, равном:
a3 |
= G(2 −k)g |
, |
k=1.15…1.2 − коэффициент вязких сопротивлений |
|
m |
|
|
Реализация принятой при проектировании подъёмной установки рабочей тахограммы связана с получением путевых команд. В режиме ручного управления, машинист, руководствуясь по указателю глубины текущего положения подъёмных сосудов в стволе, управляет ЭП, и при необходимости тормозом, обеспечивая более или менее близкое совпадение фактической и расчётной тахограммы.
В режиме автоматического управления команды в функции положения сосуда в стволе, выдаёт путевой командоаппарат.
Управление подъёмной машиной производится с пульта, на котором находятся две рукоятки: управление ЭП и тормозом, указатель глубины, необходимые электроизмерительные приборы и сигналы подачи управления.
Подавляющее большинство подъёмных машин оснащены одноканальными сельсинными указателями глубины. Сельсин-датчик приводится во вращение от вала подъёмной машины и делает обычно 100 оборотов за весь путь подъёма. На пульте установлен сельсинный указатель глубины, точная стрелка которого связана с сельсин− приёмником непосредственно. Грубая стрелка получает вращение через редуктор с передаточным числом i=100. Грубая стрелка делает за весь путь 1 оборот. В последнее время появились цифровые указатели глубины.