

PT
.pdfВид внешней характеристики генератора со смешанным возбуждением зависит от соотношения магнитных потоков от обмоток параллельного и последовательного возбуждения, а также от направления магнитных потоков, создаваемых этими обмотками.
При холостом ходе генератора  напряжение на его зажимах равно номинальному
напряжение на его зажимах равно номинальному  . При включении нагрузки и последющем её росте напряжение начинает изменяться.
. При включении нагрузки и последющем её росте напряжение начинает изменяться.
Регулировочная характеристика
Наличие двух обмоток при их согласном включении позволяет получать приблизительно постоянное напряжение генератора при изменении нагрузки. Подбирая число витков последовательной обмотки так,
чтобы при номинальной нагрузке создаваемое ею напряжение  компенсировало суммарное падение напряжения
компенсировало суммарное падение напряжения  при работе машины с одной только параллельной обмоткой, можно добиться,
при работе машины с одной только параллельной обмоткой, можно добиться,
чтобы напряжение  при изменении тока нагрузки от нуля до
при изменении тока нагрузки от нуля до  номинального оставалось практически неизменным.
номинального оставалось практически неизменным.
При холостом ходе генератора ток возбуждения равен некоторой величине  , а затем с ростом нагрузки
, а затем с ростом нагрузки  он начинает спадать. Это объясняется тем, что с появлением нагрузки
он начинает спадать. Это объясняется тем, что с появлением нагрузки  вступает в действие последовательная обмотка возбуждения, магнитное поле которой действует согласно с магнитным полем
вступает в действие последовательная обмотка возбуждения, магнитное поле которой действует согласно с магнитным полем
параллельной обмотки возбуждения. Для поддержания постоянства результирующего магнитного потока, а
значит, и постоянства напряжения на зажимах генератора необходимо вначале несколько снижать ток возбуждения  в параллельной обмотке возбуждения.
в параллельной обмотке возбуждения.
Однако по мере роста нагрузки генератора и приближения её к номинальной ток возбуждения начинает расти. Это объясняется тем, что с ростом нагрузки генератора усиливается влияние реакции якоря,
увеличивается падение напряжения в якорной обмотке, возникает магнитное насыщение в стали генератора и снижается напряжение на зажимах генератора. В данном случае для поддержания постоянства напряжения необходимо увеличивать ток в параллельной обмотке. В результате этого ток возбуждения  параллельной обмотки достигает при номинальной нагрузке
параллельной обмотки достигает при номинальной нагрузке  генератора величины, примерно равной току возбуждения при холостом ходе генератора.
генератора величины, примерно равной току возбуждения при холостом ходе генератора.
Генераторы с последовательным возбуждением
Генераторы постоянного тока с последовательным возбуждением имеют обмотку возбуждения, включенную последовательно с якорной обмоткой.
Ток в обмотке возбуждения |
равен току (нагрузке) генератора : |
. |
|
Так как нагрузка при холостом ходе равна нулю, то и ток возбуждения |
равен нулю, |
||
следовательно, характеристику холостого хода, то есть зависимость напряжения |
на зажимах генератора |
||
от тока возбуждения  при постоянном числе оборотов
при постоянном числе оборотов  в данном генераторе снять
в данном генераторе снять
невозможно.
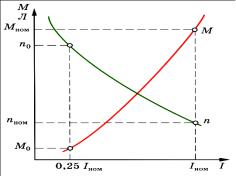
Внешняя характеристика: напряжение  на зажимах генератора вначале растёт вместе с нагрузкой
на зажимах генератора вначале растёт вместе с нагрузкой  (участок
(участок  кривой), а затем начинает уменьшатся. Это объясняется так: вначале с ростом нагрузки
кривой), а затем начинает уменьшатся. Это объясняется так: вначале с ростом нагрузки  растёт и ток возбуждения
растёт и ток возбуждения  , так как
, так как  . Следовательно, растут электродвижущая
. Следовательно, растут электродвижущая
сила  и напряжение
и напряжение  на зажимах генератора. Однако по мере увеличения нагрузки
на зажимах генератора. Однако по мере увеличения нагрузки  напряжение
напряжение  на его зажимах начинает спадать, потому что падение напряжения
на его зажимах начинает спадать, потому что падение напряжения  внутри якорной обмотки становится всё более ощутимым. Кроме того, электродвижущая сила
внутри якорной обмотки становится всё более ощутимым. Кроме того, электродвижущая сила  генератора по мере магнитного насыщения стали генератора увеличивается очень мало, поэтому, невзирая на её некоторый рост, напряжение на зажимах генератора после некоторой предельной нагрузки
генератора по мере магнитного насыщения стали генератора увеличивается очень мало, поэтому, невзирая на её некоторый рост, напряжение на зажимах генератора после некоторой предельной нагрузки  начинает уменьшаться.
начинает уменьшаться.
Регулировочную характеристику генератора с последовательным возбуждением снять невозможно,
потому что при изменении нагрузки генератора невозможно подобрать ток его возбуждения так, чтобы сохранить напряжение на зажимах генератора постоянным по величине.
8.) Двигатели постоянного тока, назначение, классификация, области их применения
Электрические машины постоянного тока используются как в качестве генераторов, так и в качестве двигателей. Наибольшее применение имеют двигатели постоянного тока, области применения и диапазон мощности которых достаточно широки: от долей ватт (для привода устройств автоматики) до нескольких тысяч киловатт (для привода прокатных станов, шахтных подъемников и других механизмов). Двигатели постоянного тока широко используются для привода подъемных средств в качестве крановых двигателей и привода транспортных средств в качестве тяговых двигателей. Основные преимущества двигателей постоянного тока по сравнению с бесколлекторными двигателями переменного тока – хорошие пусковые и регулировочные свойства, возможность получения частоты вращения более 3000 об/мин, а недостатки – относительно высокая стоимость, некоторая сложность в изготовлении и пониженная надежность. Все эти недостатки машин постоянного тока обусловлены наличием в них щеточно-коллекторного узла, который к тому же является источником радиопомех и пожароопасности. Эти недостатки ограничивают применение машин постоянного тока.В последние годы созданы и успешно применяются двигатели постоянного тока, у которых механический коллектор заменен бесконтактным коммутатором на полупроводниковых элементах.
9.)Основные характеристики двигателей постоянного тока при различном способе подключения обмотке возбуждения
Двигатель независимого возбуждения (ДПТ НВ)
Скоростная характеристика n = f(Ia) описывается соотношением: n |
U c I a Ra |
||
|
|
|
|
|
Ce 0 |
|
|
При возрастании тока якоря падение напряжения IaRa уменьшает, а Ф увеличивает частоту вращения. Возможны три вида скоростной характеристики при разном соотношении влияющих факторов.
Механическая характеристика n = f(М). Дляаналитического выражения данной зависимости выразит
значение тока Ia при условии постоянства потока: I a |
|
M |
|||
|
|
|
|||
CМ |
|||||
и подставим в уравнение частоты вращения n |
U |
|
M Ra |
||
CE |
CE CM 2 |
||||
Если величина магнитного потока при работе изменяется, то соотношение принимает вид:
n |
|
U |
|
|
M Ra |
|
|
|
2 |
||
|
CE O |
|
|
CE CM ( o ) |
|
Моментная характеристика М = f(Ia). Данную зависимость можно получить на основании математического соотношения:М = СмФIa = См (Ф0 – Ф) Ia
Двигатель параллельного возбуждения (ДПТ ПВ)
Характеристики двигателя с параллельным возбуждением подобны характеристикам двигателя с независимым возбуждением
Двигатель последовательного возбуждения (ДПТ ПВ)
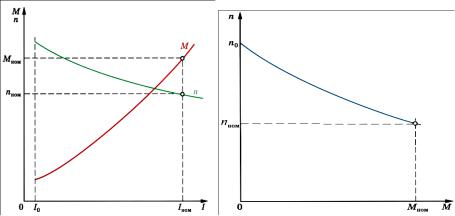
Скоростная характеристика n = f(Ia)
Из графика видно, что при ненасыщенной магнитной системе (при малых нагрузках) с увеличением нагрузки частота вращения резко убывает. Но затем наступает насыщение магнитной системы двигателя и магнитный поток при возрастании нагрузки практически не изменяется и скоростная характеристика приобретает почти прямолинейный характер. Такую характеристику принято называть мягкой.
При уменьшении нагрузки ДПТ ПВ частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений (явление «разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря и при наличии нагрузки на валу двигателя.
Для более надежной работы вращающий момент с двигателя на рабочий механизм передают только с помощью зубчатых передач. Применение ременных и цепных передач недопустимо, так как при разрыве гибкой связи может произойти «разнос» двигателя.
Моментная характеристика М = f(Ia).

Электромагнитный момент имеет параболическую зависимость. В области больших токов магнитный поток будет меньше из-за насыщения и влияния реакции якоря, что вызовет снижение момента (кривая 2) по сравнению с расчетным значением (кривая 1).
Механическая характеристика n = f(М)
Электромагнитный момент М при увеличении нагрузки резко возрастает, так как он пропорционален квадрату тока нагрузки. Ток, потребляемый двигателем при увеличении нагрузки, растет в меньшей степени, чем у ДПТ НВ. Это объясняется тем, что одновременно с ростом тока растет магнитный поток и вращающий момент становится равным моменту нагрузки при меньшем токе.
Резко падающая кривая механической характеристики обеспечивает ДПТ последовательного возбуждения устойчивую работу при любой нагрузке большей 25 % от номинальной.
ДПТ ПВ применяются в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.
Двигатель смешанного возбуждения (ДПТ СВ)
Данный тип двигателей имеет две обмотки, подключенные к обмотке якоря.
Результирующий магнитный поток определяется суммой и способом включения обмоток возбуждения.
ФΣ = Фш ± Фс
«+» - согласное включение обмоток, «-» -встречное включение обмоток
n |
U c I a |
Ra |
|
|
|
|
|
Фс |
|
|
|
Частота вращения определяется соотношением: |
Ce ш |
|
|
|
|
При встречном включении обмоток возбуждения, поток последовательной обмотки Фс размагничивает машину, что, наоборот, повышает частоту вращения. Работа двигателя при этом
становится неустойчивой, так как с увеличением нагрузки частота вращения неограниченно растет. Однако при небольшом числе витков последовательной обмотки с увеличением нагрузки частота вращения не возрастает и во всем диапазоне нагрузок остается практически неизменной.
Рассмотрим характеристики ДПТ последовательного возбуждения при согласном включении. МДС, действующая на полюсах двигателя, определяется суммой МДС отдельных обмоток:
FΣ = Fш + Fс = WшIвш + WcIвс
В этом случае с увеличением нагрузки общий магнитный поток увеличивается (за счет потока последовательной обмотки Фс), что ведет к уменьшению частоты вращения двигателя.
Характеристики n = f(Ia) и М = f(Ia).. Механическая характеристика n=f(M)
Скоростная и механическая характеристики этого двигателя более жесткие, чем у двигателя последовательного возбуждения, но менее жесткие, чем ДПТ параллельного возбуждения. Эти двигатели могут работать в режиме х.х., так как поток параллельной обмотки Фш ограничивает частоту вращения и устраняет явление «разнос». Данные двигатели применяют обычно там, где требуются значительные пусковые моменты, быстрое ускорение при разгоне, устойчивая работа и допустимо лишь небольшое снижение частоты вращения при увеличении нагрузки на вал (грузовые подъемники, насосы, компрессоры).
Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится
10). Способы регулирования скорости двигателей постоянного тока. Сравнительная характеристика.
Уравнение двигателей постоянного тока
Уравнение равновесия напряженияU = Ea + IaΣRa + ΔUщ
Приложенное к якорю напряжение уравновешивается наведенной ЭДС и падением напряжения в цепи якоря.
Для приближенных расчетов – упрощенный вид U = Ea + IaRa
Величина составляющей IaRa (2-5) % от номинального напряжения.
Уравнение баланса мощностей UIa = EaIa + IaIaΣRa + IaΔUщ
UIa – мощность подводимая из сети к цепи якоря.
EaIa – электромагнитная мощность Рэм.
IaIaΣRa – электрические потери в обмотке якоря Рэа.
IaΔUщ – электрические потери в щеточном контакте Рэщ.
Рэм численно равна суммарной механической мощности двигателя Рмех. Составные части суммарной механической мощности: Рмх – механические потери, Рм – магнитные потери в стали якоря, Рд – добавочные и Р2 – полезная мощность.
Уравнение равновесия моментов М = М2 + М0 = Мс
|
n |
U I a Ra |
||
Уравнение частоты вращения |
Ce |
Ф |
||
|
||||
11) Режимы работы двигателя постоянного тока. Переход от одного режима к другому.
В зависимости от величины из знака внешнего момента, действующего на вал со стороны механизма двигатель постоянного тока может работать в трех режимах:
-двигательном режиме;
-тормозном режиме;
-генераторном режиме.
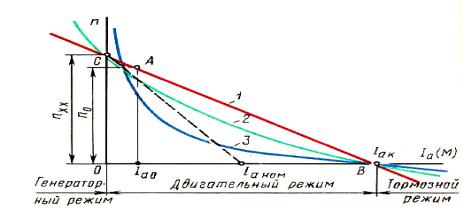
Режимы работы ДПТ
Двигатель постоянного тока в зависимости от величины и знака внешнего момента, действующего на его вал со стороны связанного с ним механизма, может работать в трех режимах:
Режимы работы машины постоянного тока:
1 – с параллельным (независимым) возбуждением; 2 – со смешанным возбуждением; 3 – с последовательным возбуждением
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря
(штриховая прямая).
Если при работе двигателя в режиме холостого хода к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЕДС начнут возрастать.
Когда ЕДС |
, машина не будет потреблять тока из сети (точка С) и частота вращения якоря |
|
достигает значения, называемого пограничной частотой вращения |
. |
|
При дальнейшем увеличении внешнего момента на валу машины ЕДС станет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторний режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
12. Тахогенераторы постоянного тока.
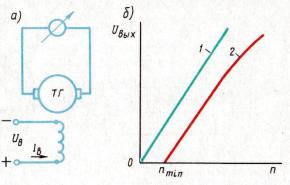
Тахогенераторы постоянного тока служат для измерения частоты вращения по значению выходного напряжения, а также для получения электрических сигналов, пропорциональных частоте вращения вала в схемах автоматического регулирования. Тахогенератор постоянного тока представляет собой генератор малой мощности с электромагнитным независимым возбуждением (рисунок а) или с возбуждением постоянными магнитами.
Ввиду того, что при постоянном токе возбуждения Iв const магнитный поток практически не зависит
от нагрузки, выходная ЭДС тахогенератора Eвых прямо пропорциональна частоте вращения:
Eвых ce n ce/ n, где ce/ n const.
Последняя формула справедлива и для тахогенератора с возбуждением постоянными магнитами, где
const. Для измерения частоты вращения тахогенератором вал последнего механически соединяют с валом механизма, частоту вращения которого требуется измерить. На выводы тахогенератора подключают измерительный прибор со шкалой, градуированной в единицах частоты вращения.
Принципиальная схема (а) и выходная характеристика (б) тахогенератора постоянного тока
Точность работы тахогенератора определяется его выходной характеристикой, представляющей собой зависимость выходного напряжения от частоты вращения при неизменном значении сопротивления нагрузки. Наиболее точная работа тахогенератора соответствует прямолинейной выходной характеристике (рисунок б, прямая 1).
Однако в реальных тахогенераторах выходная характеристика не прямолинейна (график 2) и к тому же она выходит не из начала осей координат. Основная причина криволинейности характеристики
– реакция якоря, поэтому уменьшению криволинейности этой характеристики способствует включение на выход тахогенератора приборов с большим внутренним сопротивлением, так как при уменьшении тока якоря ослабляется действие реакции якоря. В современных тахогенераторах отклонение выходной характеристики от прямолинейной составляет от 0,5 до 3 %.
Падение напряжения в щеточном контакте Uщ создает в тахогенераторе зону нечувствительности. Это диапазон частот вращения от 0 до nmin , в котором напряжение на выходе тахогенератора равно нулю.

n |
|
Uщ |
. |
|
|||
min |
|
ce Широкое применение получили |
|
Граница зоны нечувствительности определяется выражением: |
|
||
тахогенераторы постоянного тока, возбуждаемые постоянными магнитами. Эти тахогенераторы не имеют обмотки возбуждения, и поэтому они проще по конструкции и имеют меньшие габариты.
13. Исполнительные двигатели постоянного тока.
Исполнительные двигатели постоянного тока применяются в системах автоматики для преобразования электрического сигнала в механическое перемещение. Помимо обычных требований, предъявляемых к электродвигателям общего назначения к исполнительным двигателям предъявляется ряд специфических требований, их которых основными являются отсутствие самохода и малоинерционность (высокое быстродействие).
Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами) имеют две обмотки. Одна из них постоянно подключена к сети и называется обмоткой возбуждения, на другую – обмотку управления – электрический сигнал подается лишь тогда, когда необходимо вызвать вращение вала. От напряжения управления зависят частота вращения и вращающий момент исполнительного двигателя, а следовательно, и развиваемая им механическая мощность.
Исполнительные двигатели постоянного тока по конструкции отличаются от двигателей постоянного тока общего назначения только тем, что имеют шихтованные (набранные из листов электротехнической стали) якорь, станину и полюсы, что необходимо для работы исполнительных двигателей в переходных режимах.
Магнитная цепь исполнительных двигателей не насыщена, поэтому реакция якоря практически не влияет на их рабочие характеристики.
В качестве исполнительных двигателей постоянного тока в настоящее время используют чаще всего двигатели с независимым возбуждением, реже – двигатели с постоянными магнитами. У двигателей с независимым возбуждением в качестве обмотки управления используют либо обмотку якоря – двигатели с якорным управлением, либо обмотку полюсов – двигатели с полюсным управлением.
У исполнительных двигателей с якорным управлением обмоткой возбуждения является обмотка полюсов, а обмоткой управления – обмотка якоря (рисунок а).
Схемы включения исполнительных двигателей постоянного тока
Обмотку возбуждения подключают к сети с постоянным напряжением на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
14. Универсальные коллекторыне двигатели
Универсальными называют коллекторные двигатели, которые могут работать как от сети постоянного, так и от сети однофазного переменного тока.
Коллекторный двигатель постоянного тока в принципе может работать от сети переменного тока, так как при переходе от положительного полупериода переменного напряжения к отрицательному

направление электромагнитного момента сохраняется неизменным. Объясняется это тем, что при переходе к отрицательному полупериоду почти одновременно с изменением направления тока в обмотке якоря изменяется направление тока в обмотке возбуждения, т.е. меняется полярность полюсов.
Однофазные коллекторные двигатели имеют преимущественно последовательное возбуждение. Применение параллельного возбуждения (рисунок а) в данном случае ограничивается значительной индуктивностью параллельной обмотки возбуждения, имеющей большое число витков. Это
создает значительный фазовий сдвиг между током якоря Ia и током возбуждения Iв на угол (рисунок б). Среднее значение электромагнитного момента в этом случае определяется выражением, которое
учитывает угол сдвига между током якоря и магнитным потоком:
К принципу работы универсального коллекторного двигателя
Mпар сМ ( max / |
|
|
|
|
|
||
2) Ia cos( ), |
|
|
|
||||
где max - максимальное значение магнитного потока; |
|
|
|
||||
|
|
- угол сдвига фаз между током якоря и током возбуждения; |
|
|
|||
|
|
- угол сдвига фаз между током возбуждения и магнитным потоком (угол магнитного |
|||||
запаздывания), обусловленный наличием магнитных потерь в машине [ |
( ) 900 |
||||||
|
|
, а |
|||||
следова-тельно, |
cos( ) 0 ]. |
|
|
|
|||
|
|
В двигателе последовательного возбуждения (рисунок в) ток якоря |
Ia |
и ток возбуждения |
|||
|
|
|
|||||
Iв |
|
0 |
(рис. г). Поэтому среднее значение электромагнитного вращающегося |
||||
|
совпадают по фазе: |
|
|||||
момента в двигателе последовательного возбуждения Mпосл больше, чем в двигателе параллельного возбуждения: Mпосл сМ ( max / 
 2) Ia cos .
2) Ia cos .
Электромагнитный момент двигателя последовательного возбуждения при работе от сети переменного тока имеет постоянную составляющую Mпост (рисунок д) и переменную составляющую
Mпер , изменяющуюся с частотой, равной удвоенной частоте сети f1 (рисунок е). Результирующий
момент этого двигателя является пульсирующим M Mпосл (рисунок ж):
M Mпосл ( Mnep )
Небольшие участки графика M f (t) с отрицательным (тормозным) моментом обусловлены фазовым сдвигом между векторами магнитного потока max и током I1 (рисунок г). Пульсации момента
M практически не нарушают работу двигателя, включенного в сеть переменного тока, так как сглаживаются за счет момента инерции вращающегося якоря.
По своей конструкции универсальные коллекторные двигатели отличаются от двигателей постоянного тока тем, что их станина и главные полюсы делаются шихтованными из листовой электротехнической стали. Это дает возможность сократить магнитные потери, которые при работе двигателя от сети переменного тока повышаются, так как переменный ток в обмотке возбуждения вызывает перемагничивание всей магнитной цепи, включая станину и сердечники полюсов.
Основной недостаток однофазных коллекторных двигателей – тяжелые условия коммутации. Дело в том, что в коммутирующих секциях помимо реактивной ЭДС и ЭДС внешнего поля
наводится трансформаторная ЭДС eтр , действующее значение которой:
Eтр 4,44 f1 wc max.
В универсальном коллекторном двигателе стремятся получить примерно одинаковые частоты вращения при номинальной нагрузке как на постоянном, так и на переменном токе. Достигается это тем, что обмотку возбуждения двигателя выполняют с ответвлениями: при работе двигателя от сети постоянного тока обмотка возбуждения используется полностью, а при работе от сети переменного тока – частично. (рисунок
а).
Расхождение в характеристиках двигателя на постоянном и переменном токе объясняется тем, что при работе от сети переменного тока на величину и фазу тока оказывают влияние индуктивные сопротивления обмоток якоря и возбуждения. Однако уменьшение числа витков обмотки возбуждения обеспечивает сближение характеристик лишь при нагрузке, близкой к номинальной. На рисунке б приведены рабочие характеристики универсального коллекторного двигателя (синими линиями – при работе двигателя от сети переменного тока, а красными – от сети постоянного тока).