

2.3 Попереднє визначення потужності двигуна
Згідно,
таблиць 2.2 і 2.3 найбільша і найменша
частота рівні, відповідно 5300 і 310 об /
хв. Найбільша ефективна потужність
різання, згідно, таблиці 2.2 буде. при
фрезеруванні торцевої фрезою Ø200 мм:
 =0,3
мм / зуб; t = 5 мм. Розрахуємо складові сили
різання для даних умов обробки.
=0,3
мм / зуб; t = 5 мм. Розрахуємо складові сили
різання для даних умов обробки.
Головна складова сили різання при фрезеруванні дорівнює

де Ср = 332 - коефіцієнт в рівнянні сили різання, [7];
х = 0,1; у = 0,4; п= 0,2; q = 0,2; w = 0,2 - показники ступеня в рівнянні
швидкості різання, [7];
t = 5 мм — глибина різання;
Sz=0,3 мм/зуб - подача на зуб;
z = 20- число зубів фрези;
D - 200 мм - діаметр фрези;
п- 310 об/хв - частота обертання фрези;
 -поправочний
коефіцієнт,
враховує вплив якості оброблюваного
матеріалу на силу різання.
-поправочний
коефіцієнт,
враховує вплив якості оброблюваного
матеріалу на силу різання.
Згідно, формули 2.1

Радіальну і осьову складові сили різання визначимо з співвідношень, наведених в таблиці 42[7];

3. Кінематичний розрахунок приводу головного
РУХУ АКС
Вихідними
даними для кінематичного розрахунку
приводу є мінімальна частота обертання
шпинделя
 ,
максимальна частота обертання
,
максимальна частота обертання
Шпинделя
 ,,
і знаменник геометричного ряду частот
обертанняφ.
Кінематичний розрахунок виконується
таким чином:
,,
і знаменник геометричного ряду частот
обертанняφ.
Кінематичний розрахунок виконується
таким чином:
1.
Визначається діапазон регулювання
 .
.
2. Визначається число ступенів швидкості z.
3. Вибирається структура коробки швидкостей.
Мал. 3.1-Структурна схема - варіант 1

Мал. 3.2 - Структурна схема - варіант 2

Мал. 3.3 - Структурна схема - варіант З
Діапазон регулювання дорівнює:
![]()
Оскільки
діапазон регулювання, недостатньо
великий, розширимо його![]()
Число ступенів швидкостей:
![]()
Згідно завдання на курсовий проект вибираємо структурну схему 3 · (0 + 2 + 3) = 15.
За кількістю швидкостей проаналізуємо три можливих структури коробок швидкостей, а потім виберемо оптимальну структуру, базуючись на наявному досвіді верстатобудування.
Основні параметри приводів зведені в таблицю 3.1.
Таблиця ЗЛ. - Основні параметри приводів
|
№ |
Структурна |
Кількість |
Кількість |
Кількість |
|
варіанта |
я формула |
шестерень |
валів |
блоків |
|
1 |
3(и0 +2 + 2) |
24 |
7 |
4 |
|
2 |
3(0 + 2 + 3) |
20 |
5 |
3 3 |
|
3 |
2((/0 +3 + 2x2) |
26 |
7 |
5 |
Вибір оптимального варіанту виробляємо за наступними критеріями: вибрана коробка повинна мати найменші габарити, при цьому у варіантах 2 і 3 (мал. 3.1, 3.3) необхідне введення регулюючої подачі, що ускладнює конструкцію коробки швидкостей, так само в сучасному верстатобудуванні знайшли найбільше застосування складні структури з двома кінематичними ланцюгами, ніж з трьома.
Виходячи, з вище сказаного в даному випадку найбільш оптимальним є варіант 2 (рис. 3.2).
3.1. Аналіз обраної структури
У
вибраній структурі (див. мал. 3.1.) рух з
валу I на вал II передається за рахунок
блоку шестерень
 ,
потім рух передається на вал V за рахунок
блоку
,
потім рух передається на вал V за рахунок
блоку ,
або на вал III через постійну передачу
Un і далі за рахунок блоку
,
або на вал III через постійну передачу
Un і далі за рахунок блоку рух передається на вал V. Вал V є робочим
органом верстата, тобто шпинделем.
рух передається на вал V. Вал V є робочим
органом верстата, тобто шпинделем.
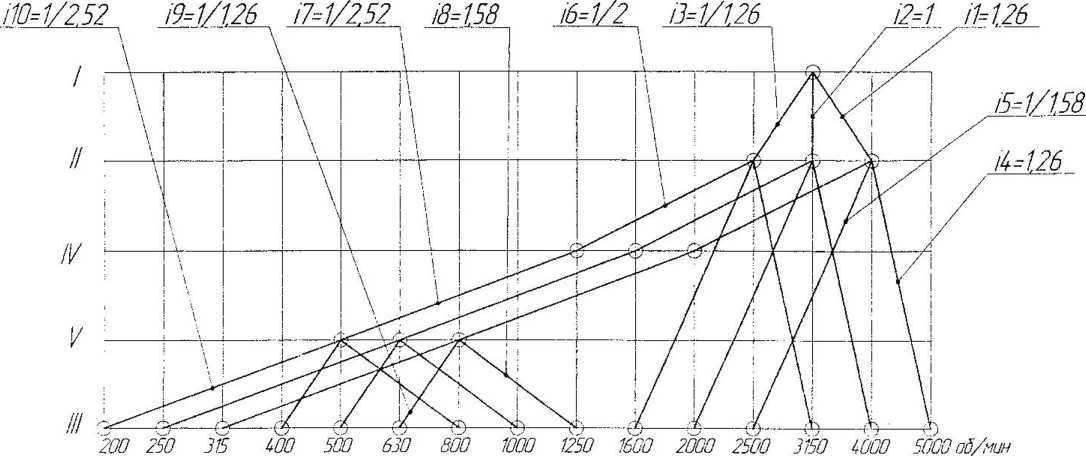
3.2. Побудова графіка частот обертання
Вихідними даними до побудови графіка частот обертання є:
Структурна сітка, знаменник прогресії φ = 1,26, структурна формула.
 Мал.
3.4 - Структурна сітка 3 (0 + 2 + 3)
Мал.
3.4 - Структурна сітка 3 (0 + 2 + 3)
4 РОЗРАХУНОК І РОЗРОБКА Кінематична схема ПРИВОДУ З
ЧПУ
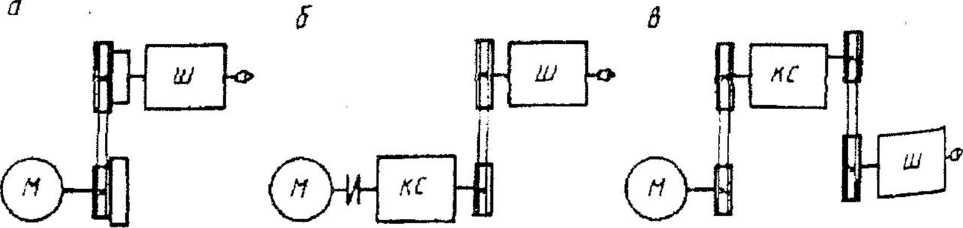
4.1 Вибір структури приводу головного руху
Проектований верстат характерний малими крутний момент на шпинделі верстата. За своїм компонування і конструкції верстат максимально наближений до верстатів невеликих розмірів. Для таких верстатів рекомендуються приводи [7, с. 129]: рис. 2.1 (в).
На первинному етапі вибираємо електродвигун постійного струми 4ПФ112S [1] з наступними технічними характеристиками: N = 7,5 кВт;
 =
5000 об / хв;
=
5000 об / хв;
 = 2220 об / хв.;
= 2220 об / хв.;
Вибираємо
схему (б). Так як діапазон регулювання
частот обертання шпинделя
 = 25. А діапазон регулювання двигуна при
постійно потужності Rдр = 5000/2220 = 2,25. Отже,
у верстаті необхідна коробка передач
які присутня в схемах (б, в). У схемі (в)
присутній дві ременні передачі, які для
проектованого верстата не є доцільним,
так як у всіх верстатах прототипах
використаються всього одна ремінна
передача.
= 25. А діапазон регулювання двигуна при
постійно потужності Rдр = 5000/2220 = 2,25. Отже,
у верстаті необхідна коробка передач
які присутня в схемах (б, в). У схемі (в)
присутній дві ременні передачі, які для
проектованого верстата не є доцільним,
так як у всіх верстатах прототипах
використаються всього одна ремінна
передача.
Для
забезпечення безступінчатого регулювання
частоти врашення шпинделя при постійній
потужності знаменник ряду передавальних
відносин коробки швидкостей
 приймаємо
рівним Rдр. Необхідна кількість ступенів
коробки швидкостей
приймаємо
рівним Rдр. Необхідна кількість ступенів
коробки швидкостей
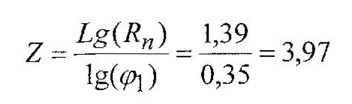
Приймаємо z=3.
Діапазон регулювання коробки швидкостей дорівнює
![]()
Приймаємо
мінімальну частоту обертання при
постійній потужності на валі шпинделя
рівною
 ,
Тоді:
,
Тоді: =710
об / хв. Тоді:
=710
об / хв. Тоді:
![]()
Так як знаменник геометричного ряду в коробках швидкостей верстатів з ЧПУ> 1 [2], то приймаємо -1,06.
За отриманими даними будуємо графік частот обертання приводу головного руху
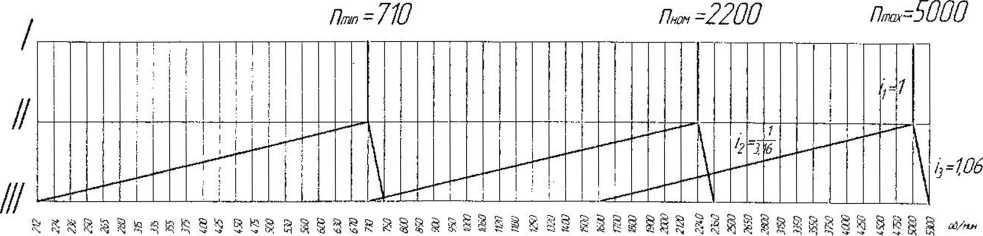
Малюнок 4.2 - Графік частот обертання приводу головного руху