

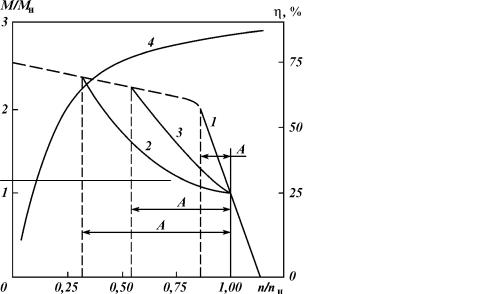
Рис. 23.2. Внешние характеристики электродвигателей:
1 – синхронного; 2 – асинхронного; 3 – постоянного тока (À, À′ – номинальный момент)
абсолютно жесткая (линия 1) – частота вращения при изменении момента постоянна; такую характеристику имеют синхронные электродвигатели;
жесткая (кривая 2) – с увели- чением момента частота вращения уменьшается незначительно; такой характеристикой обладают асинхронные двигатели переменного тока и двигатели постоянного тока параллельного и независимого возбуждения;
гибкая (кривая 3) – при небольшом изменении момента значительно изменяется частота вращения; такой характеристикой обладают двигатели постоянного тока последовательного возбуждения.
Частота вращения электродвигателя и развиваемый им момент могут изменяться автоматически без воздействия каких-либо внешних регуляторов; в этом случае автоматическим регулятором является противоэлектродвижущая сила самого двигателя.
Естественные характеристики электрических двигателей можно изменять с помощью регулирующих устройств, на которые воздействует оператор; такие характеристики называют искусственными.
При выборе двигателя для силового привода важно знать, как будут изменяться его основные параметры, т.е. крутящий момент M, частота вращения n и мощность N в зависимости от изменения напряжения и частоты тока в питающей сети.
В асинхронных электродвигателях переменного трехфазного тока параметры изменяются по следующим зависимостям.
Скольжение номинальное
S = (nc − ní )/ nc,
ãäå – nc = 60f / z – синхронная частота вращения, мин–1; f – частота то-
ка (для промышленных сетей f = 50 Ãö); z – число пар полюсов. Крутящий момент M пропорционален квадрату питающего напряже-
ния, поэтому рассматриваемый привод весьма чувствителен к колебаниям напряжения. Максимальный крутящий момент обратно пропорционален квадрату частоты тока сети.
Для силовых приводов буровых установок с питанием от общепромышленных сетей переменного тока при допускаемом колебании напряжения от +5 до – 10 % максимальный момент может уменьшаться до 0,8 номинального, указанного в каталогах. При пуске электродвигателей сила тока увеличивается, а напряжение в сети падает ниже допустимых пределов. В связи с этим асинхронные двигатели должны обладать высокой перегрузочной способностью даже в период падения напряжений и возрас-
834
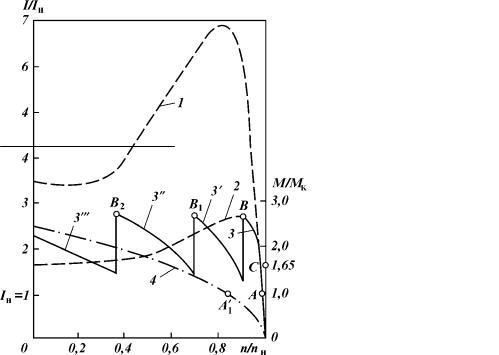
Рис. 23.3. Внешние характеристики асинхронных двигателей переменного трехфазного тока:
1, 2 – сила тока и крутящий момент асинхронного двигателя с короткозамкнутым ротором; 3, 3′, 3″, 3′″ – относительный момент асинхронного двигателя с фазным ротором; 4 – относительный момент асинхронного электродвигателя с повышенным скольжением (I/Ií – относительная сила тока)
тания пусковых моментов даже в период падения напряжений и возрастания пусковых моментов сопротивления при относительно небольшой силе пускового тока, при этом они должны развивать необходимый вращающий момент.
На рис. 23.3. приведены внешние номинальные характеристики электродвигателей переменно-
го трехфазного тока. Кривая 1 соответствует изменению силы потребляемого тока, кривая 2 – естественному изменению крутящего момента асинхронного двигателя с короткозамкнутым ротором. Пуск такого двигателя производят непосредственно при включении в сеть без промежуточных пусковых устройств. Такие электродвигатели можно применять для привода насосов; для привода лебедки и ротора их используют только с турботрансформаторами или электромагнитными муфтами скольжения и с коробками передач.
Электродвигатель с фазным ротором имеет контактные кольца, что позволяет при пуске вводить ступенчато в цепь ротора добавочные сопротивления, определяющие искусственные характеристики (кривые 3, 3′, 3′′, 3′′′. Введение добавочного активного сопротивления увеличивает полное сопротивление роторной цепи, благодаря чему снижаются пусковой момент и критическое скольжение. Максимальные моменты остаются неизменными (точки Â, Â1 è Â2). Активное сопротивление в роторной цепи регулируют так, что переключение с одной реостатной характеристики на другую происходило при расчетных значениях моментов переключения. По окончании пуска сопротивление в цепи ротора уменьшают, и двигатель далее работает при параметрах, соответствующих двигателю с короткозамкнутым ротором (кривая 2).
При использовании индуктивного сопротивления в цепи ротора, несмотря на некоторое уменьшение максимального момента, получают луч- шие результаты. Индуктивное сопротивление выполняет функцию автоматического регулятора силы тока ротора. В начале разгона двигателя, когда частота тока ротора близка к частоте сети, сопротивление дросселя велико и ограничивает силу пускового тока. По мере разгона частота тока в рото-
835
ре снижается, сопротивление дросселя уменьшается и сила тока в течение всего периода пуска остается примерно постоянной.
Âэлектродвигателях с фазным ротором можно применять системы управления, в которых дроссель насыщения с внутренней обратной связью
âсочетании с активными сопротивлениями симметрично включен в цепь ротора.
Âпроцессе пуска индуктивное сопротивление изменяется под влиянием силы и частоты тока ротора, а при автоматическом управлении – еще и под действием силы результативного тока управления. Активные сопротив-
ления в процессе пуска не изменяются. Кривая 4 изменения момента такого двигателя с повышенным скольжением показана на рис. 23.3; точка À характеризует номинальный крутящий момент Mí двигателя с короткозамкнутым ротором, а точка A1 – двигателя с повышенным скольжением. В двигателях с повышенным скольжением ротор короткозамкнутый, что упрощает пусковую аппаратуру; однако КПД такого двигателя значительно ниже, чем некороткозамкнутого.
Синхронный электродвигатель отличается от асинхронного тем, что он снабжен генератором постоянного тока, служащим для намагничивания ротора; благодаря этому ротор вращается синхронно с частотой вращения, пропорциональной частоте тока и обратно пропорциональной числу пар полюсов. Частоту вращения можно регулировать только изменением частоты питающего напряжения; момент, развиваемый двигателем, пропорционален первой степени напряжения; перегрузочную способность двигателя можно повысить увеличением возбуждения. В двигателях станционарного исполнения Mmax = 1,65 Mí (точка Ñ íà ðèñ. 23.3).
Ротор синхронного двигателя снабжен также короткозамкнутой обмоткой, и его пусковые характеристики определяются пусковой характеристикой этой обмотки ротора, которая придает синхронному двигателю в режиме пуска свойства асинхронного короткозамкнутого двигателя. Эксплуатационные преимущества синхронного двигателя определяются его способностью отдавать в сеть реактивную мощность, необходимую для повышения cos ϕ. Однако абсолютно жесткая механическая характеристика двигателя и невозможность пуска под нагрузкой ограничивают его использование. К недостаткам асинхронных двигателей следует отнести также большую силу пускового тока, однако при достаточно мощных промысловых сетях и подстанциях осуществляют прямой пуск этих двигателей. Пусковые характеристики синхронных и асинхронных двигателей аналогичны.
Электродвигатели постоянного тока следует применять в буровых установках для бурения скважин большой глубины, когда к приводу предъявляют требования глубокого и плавного регулирования частоты вращения, точной остановки, повышенной плавности разгона и торможения и других режимов со сложным изменением механической характеристики.
Âбуровых установках электродвигатели постоянного тока применяют
ñавтономным приводом в сочетании с генераторами постоянного тока,
вращаемыми ДВС (электромашинная передача постоянного тока) либо двигатели постоянного тока получают питание через выпрямители от сетей переменного тока.
Частоту вращения двигателей постоянного тока регулируют изменением напряжения в якоре или силы тока возбуждения двигателя. Поскольку для изменения напряжения на зажимах якоря в электромашинной переда- че необходимо изменять силу тока возбуждения генератора, управление
836
двигателями постоянного тока осуществляют в цепях возбуждения, т.е. в цепях сравнительно малой мощности.
Характеристики двигателей постоянного тока зависят от способа возбуждения. Различают три основных способа возбуждения двигателей постоянного тока: параллельное, последовательное и комбинированное (смешанное).
На рис. 23.4 приведены внешние характеристики при разных способах возбуждения. При параллельном возбуждении (кривая 1) с изменением нагрузки магнитный поток не изменяется, поэтому пределы регулирования и характеристика определяются сопротивлением цепи якоря. При последовательном (сериесном) возбуждении (кривая 2) магнитный поток зависит от силы тока нагрузки; в этом случае механическая характеристика зависит от магнитного потока и сопротивления в цепи якоря. При смешанном возбуждении (кривая 3) суммарный магнитный поток, действующий в электродвигателе, определяется двумя составляющими: постоянной, создаваемой обмоткой параллельного возбуждения, и переменной, создаваемой обмоткой последовательного возбуждения.
В буровых установках применяют электродвигатели с последовательным или смешанным возбуждением, которые должны отвечать следующим требованиям: частота вращения для привода всех агрегатов 400– 1200 мин–1; диапазон регулирования лебедки и ротора 2–3, для привода насосов 1,5–2. Мощность одного двигателя для лебедки и насосов 300– 1000 кВт, для ротора 250–700 кВт.
ГАЗОТУРБИННЫЕ ДВИГАТЕЛИ
Газотурбинные двигатели (ГТУ) обладают хорошей приемистостью, большой надежностью и высокой естественной приспособляемостью. Газотурбинные двигатели бывают двухвальные, одновальные и комбинированные.
 двухвальном газотурбинном двигателе турбина высокого давления приводит во вращение центробежный компрессор; в силовую турбину низкого давления, находящуюся на отдельном валу, поступает газ из турбины высокого давления. Независимость питания газом этих турбин позволяет изменять характеристику двигателя в широких пределах.
Рис. 23.4. Внешние характеристики электродвигателей постоянного тока с разными способами возбуждения:
1 – параллельным; 2 – последовательным; 3 – смешанным; 4 – КПД двигателя с последовательным возбуждением (η – КПД; À – рабочий диапазон)
837
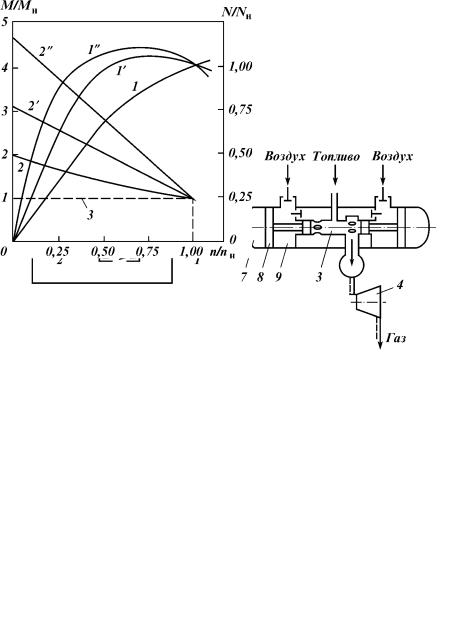
Рис. 23.5. Схемы газотурбинных установок (ГТУ):
а – одновальная; б – двухвальная; â – с генератором и свободно движущимися поршнями; 1, 2
– компрессоры низкого и высокого давления; 3
– камера сгорания; 4, 6 – трубы низкого и высокого давления; 7 – воздушная камера; 8 – поршень; 9 – камера сжатия
Рис. 23.6. Внешние характеристики (мощность и крутящий момент) ГТУ:
1, 2 – одновальной; 1′, 2′ – двухвальной; 1″, 2″ – комбинированной; 3 – номинальный крутящий момент
 одновальных газовых турбинах компрессор и турбину располагают на одном валу. При увеличении внешней нагрузки снижаются частота вращения и количество газа, питающего турбину, в результате уменьшаются мощность и крутящий момент.
Комбинированный газотурбинный двигатель состоит из генератора газа со свободно движущимися поршнями и одновальной газовой турбины. Генератор газа имеет поршневой компрессор, поршни которого непосред-
838
ственно соединены с поршнями двухтактного дизеля. Сжимаемый в поршневом компрессоре воздух через всасывающие окна подается в цилиндр дизеля, куда подводится топливо. Отработанные газы дизеля при большом давлении подаются через продувочные окна в газовую турбину, передающую мощность на исполнительный механизм.
На рис. 23.5 приведены схемы ГТУ, а на рис. 23.6 – их характеристики. Двухвальная ГТУ обладает большим коэффициентом естественной приспособляемости, чем одновальная, и имеет большую приемистость. Одновальные ГТУ обладают меньшим диапазоном естественного регулирования. Наибольший диапазон регулирования и высокий коэффициент естественной приспособляемости имеют комбинированные газотурбинные двигатели со свободно движущимися поршнями генератора газа, так как в них питание газом турбины не зависит от ее частоты вращения.
Приемистость газотурбинных двигателей зависит от схемы, конструктивного исполнения и программы регулирования подачи топлива.
Теоретически время переходных процессов можно определить с помощью уравнений термодинамики. Практически для двигателей без регенератора время перехода от холостого хода к полной нагрузке составляет несколько секунд, что вполне приемлемо для двигателя силового привода буровой установки.
Недостаток ГТУ – их низкий КПД. Одно- и двухвальные ГТУ характеризуются эффективным КПД, имеющим более низкое значение (0,12– 0,27), чем КПД двигателей внутреннего сгорания (0,36–0,38). Комбинированные ГТУ имеют более высокий КПД, чем одно- и двухвальные, и близкий к КПД дизелей (0,35–0,38). На холостом ходу и при незначительных нагрузках КПД одно- и двухвальных установок очень низкий, что служит препятствием для широкого применения их в буровых установках.
23.3. СРЕДСТВА ИСКУССТВЕННОЙ ПРИСПОСОБЛЯЕМОСТИ ДЛЯ ПРИВОДОВ
Естественные характеристики двигателей в большинстве случа- ев не могут обеспечить пусковую характеристику и диапазон регулирования, требуемые исполнительными механизмами буровой установки. Поэтому используют искусственные средства сближения требуемых характеристик с фактически имеющимися.
Крутящий момент и диапазон регулирования частот вращения лебедки и ротора в буровой установке можно изменять в пределах от 1–4 до 1–10. Ни один из рассмотренных двигателей не обладает такой характеристикой собственной приспособляемости, поэтому в трансмиссиях буровых установок применяют различные устройства искусственной приспособляемости, позволяющие трансформировать крутящий момент и частоту вращения.
Трансмиссии буровых установок можно подразделить на механиче- ские нерегулируемые или со струпенчатым регулированием частот вращения и моментов с помощью коробок передач; гидромеханические со ступенчатым или бесступенчатым регулированием частот вращения и моментов с помощью гидропередач и коробок передач; электромеханические со ступенчатым или бесступенчатым регулированием частот вращения и моментов с помощью электродинамических муфт или электромашинной передачи с коробками передач; электрические с бесступенчатым регулированием частот вращения и моментов во всем требуемом диапазоне.
839
ОБЩИЕ ЗАВИСИМОСТИ ДЛЯ ТРАНСМИССИЙ
Обозначим индексом 1 вал двигателя, а индексом 2 – ведомый (вторичный) вал трансмиссии. Тогда для любой трансмиссии можно записать следующее.
Коэффициент полезного действия трансмиссии
η = M1n2 /(M1n1), |
(23.1) |
ãäå M1, M2 – крутящий момент на ведущем и ведомом валах; n1, n2 – частота вращения этих валов.
Отношение u21 = n2/n1 называется передаточным отношением трансмиссии, а отношение моментов k = M2/M1 – коэффициентом трансформации крутящего момента.
Следовательно, всегда КПД η = ku21.
В любой трансмиссии приложены три крутящих момента: момент двигателя M1, рабочий момент M2 и опорный момент M3. Из условия равновесия трансмиссии алгебраическая сумма трех крутящих моментов равна нулю:
M1 + M2 + M3 = 0. |
(23.2) |
Трансмиссии без внешней опоры (M3 = 0) называют муфтами. Независимо от принципов их действия для них M1 = M2, k = 1, η = u21.
Для трансмиссий, понижающих частоту вращения (редукторов) k > 1, ò.å. M2 > M1, опорный момент M3 положителен (совпадает по направлению с M1). Ïðè k = 1 è M2 = M1 трансмиссия трансформирует частоту и момент, т.е. превращается в муфту (u21 = η).
Для ускоряющих трансмиссий (мультипликаторов) k < 1, u21 > 1, M2 > M1, опорный момент отрицателен.
Для трансмиссии – трансформатора, предназначенного для преобразования момента, внешняя опора обязательна.
Трансмиссия является промежуточным звеном между двигателями и исполнительным механизмом и предназначена для приспособления характеристики двигателя к характеристике, требуемой этим органом. При этом следует различать характер изменения нагрузки и частот вращения на исполнительном органе в период длительной работы и периоды пусков и остановок, т.е. режим переменно-кратковременных нагрузок. В зависимости от свойств двигателя соответствующим образом компонуют и трансмиссию.
В буровой установке исполнительные органы работают в разных режимах, как длительных, так и пусковых. Например, для ротора и насосов, пускаемых сравнительно редко, разгонные характеристики не играют большой роли, как для лебедок, работающих при спускоподъемных операциях в очень напряженном режиме повторно-кратковременных нагрузок. Длительно действующие нагрузки в этих исполнительных органах изменяются в процессе работы неодинаково, поэтому для обеспечения наибольшей эффективности процесса каждого исполнительного органа трансмиссия по возможности должна полнее удовлетворять этим требованиям, и необходимо рассматривать как пусковые и тормозные свойства, так и свойства их при длительно действующих режимах.
840
МЕХАНИЧЕСКИЕ ТРАНСМИССИИ
Механическими называют трансмиссии, передающие движение и энергию от двигателей к исполнительным органам буровой установки и состоящие из валов, различных передач (зубчатых, гибкой связью, муфт и т.д.), не регулирующие автоматически ни момента, ни частот вращения при изменении нагрузки на исполнительном органе установки.
Кинематическую настройку трансмиссий выполняет только оператор. Механические трансмиссии могут обеспечить любой диапазон трансформирования и регулирования частот вращения и крутящих моментов.
Механические трансмиссии можно подразделить на простые и сложные. Простые трансмиссии не регулируют частоты и моменты, а осуществляют только их постоянное трансформирование (например, трансмиссия бурового насоса, схема которой дана на рис. 23.7, à). Сложные трансмиссии обеспечивают трансформацию и регулирование частот и моментов под воздействием оператора. В сложных механических трансмиссиях буровых установок частоты вращения и моменты регулируют только ступенчато при помощи коробок передач (например, трансмиссия привода буровой лебедки, схема которой показана на рис. 23.7, á). Характеристика силового привода на его конечном звене – выходном валу – зависит о сочетания его собственной характеристики с жесткой характеристикой трансмиссии.
Пусковые характеристики механической трансмиссии зависят только от свойств двигателя и муфт сцепления, используемых при кратковременных режимах пусков и остановок.
В отличие от транспортных машин коробки передач в буровых установках нельзя использовать для разгона, так как силы инерции поднимаемой бурильной колонны значительно меньше сил сопротивления, а время переключения коробки передач для изменения скоростей подъема крюка относительно велико.
Если двигатель обладает способностью осуществлять пуск трансмиссии под нагрузкой (паровые машины и электродвигатели постоянного и переменного тока с фазным ротором), то в трансмиссии для соединения валов можно применять жесткие муфты сцепления (зубчатые, кулачковые и др.), которые включают муфты до начала движения; разгон трансмиссии происходит под нагрузкой при включенной муфте. При этом двигатель преодолевает сопротивление от статического (рабочего) сопротивления, инерционных сил трансмиссии и собственных вращающихся частей, т.е. уравнение механического равновесия при переходных процессах имеет вид
Mä – Mñò – Mè.ä – Mè.ò = 0, |
(23.3) |
ãäå Mä è Mñò – вращающий момент двигателя и статического сопротивления; Mè.ä è Mè.ò – моменты инерционных сил вращающихся частей двигателя и ^трансмиссии относительно осей вращения.
Инерционные моменты, Н м,
|
|
= J |
|
d2 |
ϕ |
|
|||
M |
èi |
0i |
|
|
i |
, |
(23.4) |
||
dt |
2 |
||||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|||
здесь J0i – момент инерции вращающихся частей двигателя и трансмиссии, приведенной к оси двигателя, Н м с2; ϕi – углы поворота валов, рад; t – время переходного процесса, с.
841
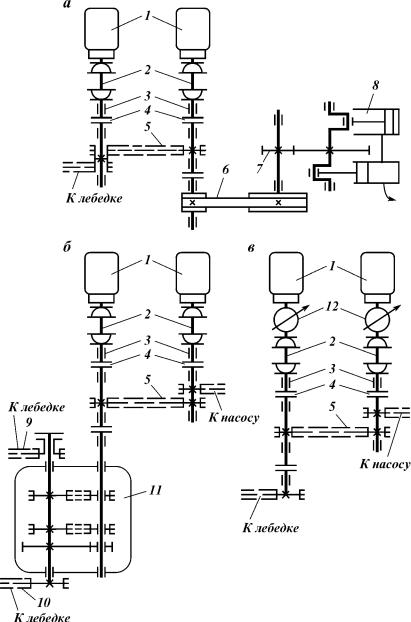
Рис. 23.7. Схемы трансмиссий силовых приводов:
а – нерегулируемой механической, блокирующей два двигателя привода насоса; б – регулируемой механической с коробкой передач привода лебедки; â – полуавтоматической привода лебедки и насосов; 1 – двигатель; 2 – карданный вал; 3 – опора; 4 – фрикционная муфта; 5 – блокирующая цепная передача; 6 – клиноременная передача привода насоса; 7 – зубчатая передача; 8 – насос; 9, 10 – «быстрая» и «тихая» цепные передачи привода лебедки; 11 – коробка передач; 12 – автоматическое регулирующее устройство
842
Так как моменты инерции разгоняемых масс двигателя весьма значи- тельны, то потери энергии при пусках могут сильно возрастать. Рациональное распределение инерционных масс между валами двигателя и трансмиссии является важной задачей, особенно для подъемного механизма буровой установки, где пуски и остановки весьма часты.
Для уменьшения вращающихся моментов двигателя при пусках используют разные средства: изменяют пусковую характеристику двигателя или устанавливают между двигателем и трансмиссией фрикционные, электродинамические или гидравлические муфты. В механических трансмиссиях применяют только фрикционные муфты.
В процессе пуска электродвигателя с короткозамкнутым ротором, соединенным с трансмиссией жесткой муфтой, время разгона очень небольшое; при этом возникают большие инерционные моменты, что требует резкого увеличения вращающего момента двигателя и ведет к увеличению силы пускового тока в 4–5 раз и более. Для прямого пуска под нагрузкой короткозамкнутые двигатели больших мощностей в буровых установках не применяют.
При пуске трансмиссии от двигателя (асинхронного или синхронного) с постоянной частотой вращения через фрикционную муфту время разгона увеличивается, а требуемый при пуске вращающий момент двигателя меньше, чем в первом случае; возникающие инерционные моменты в трансмиссии могут частично или полностью преодолеваться за счет маховых моментов ротора двигателя, почти не увеличивая его вращающего момента. Однако при жесткой характеристике двигателя и больших вращающихся массах повышаются инерционные нагрузки на муфту, вследствие чего в ней увеличивается работа трения при скольжении во время включе- ния. Для снижения влияния инерционных нагрузок на вращающий момент двигателя при его жестком соединении с трансмиссией применяют асинхронные двигатели с ротором, имеющим фазовую обмотку. В этом случае пуск происходит постепенно благодаря включению в обмотку ротора сопротивлений. При этом инерционные моменты ротора двигателя и трансмиссии, а также статический момент преодолеваются вращающим моментом самого двигателя; время разгона больше, чем в первых двух случаях.
Недостатком системы с фазным ротором является то, что двигатели требуют довольно сложной пусковой аппаратуры, причем улучшаются характеристики только процесса пуска. При рабочем режиме характеристика остается жесткой. При пуске трансмиссии от двигателя с гибкой характеристикой, например ДВС с фрикционной муфтой, угловая скорость двигателя может снижаться, а угловая скорость трансмиссии – плавно увеличи- ваться. В этот период происходит проскальзывание муфты сцепления. Разгон осуществляется частично за счет вращающего момента двигателя и сил инерции его вращающихся частей.
В определенный момент скольжение муфты прекращается, и дальнейший разгон происходит плавно благодаря увеличению топливной энергии, подводимой к двигателю по команде оператора; трансмиссия не подвергается большим динамическим нагрузкам.
Совместная работа двигателей с механической трансмиссией может обеспечить постоянную трансформацию частот вращения и крутящего момента либо при наличии коробки передач их ступенчатое изменение. На каждой из степеней частоту можно регулировать только за счет диапазона регулирования и коэффициента перегрузки самого двигателя.
843