

2 Расчёт регуляторов тока и скорости.
Составим структурную схему всей системы:
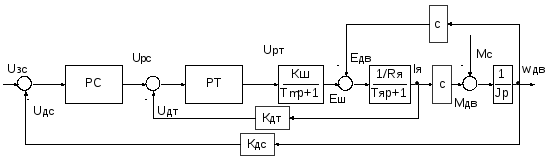
Рис.1.Структурная схема всей системы.
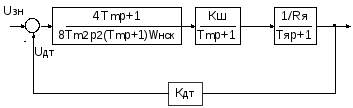
Рис.2.Структурная схема контура тока при настройке на симметричный оптимум.
Передаточная функция регулятора тока, настроенного на симметричный оптимум имеет следующий вид:
![]() ,
,
где Тm—малая постоянная времени;
Wнск—передаточная функция нескомпенсированной системы.
Для определения передаточной функции нескомпенсированной системы необходимо записать передаточную функцию разомкнутого контура тока без учета передаточной функции регулятора тока. Для этого размыкаем обратную связь и получаем:
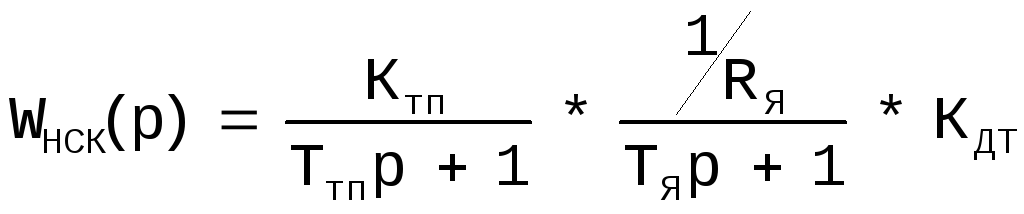
Тогда
передаточная функция регулятора тока
будет иметь вид:![]()
Регулятор тока представляется в виде ПИ-регулятора.
Для ограничения перерегулирования на входе контура тока имеется фильтр с передаточной функцией
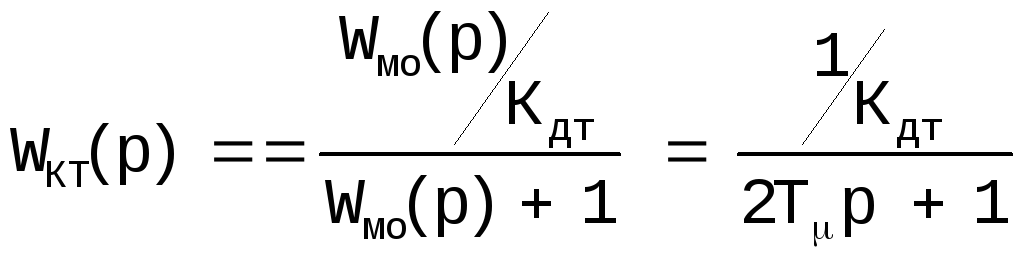
Для расчета регулятора скорости представим контур тока в виде звена:
Структурная схема контура скорости имеет следующий вид:
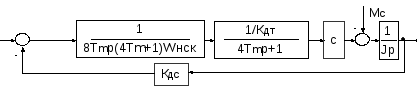
Рис.3.—Контур скорости с регулятором
Передаточная функция регулятора скорости настроенного на модульный оптимум имеет вид:
![]() ,
,
необходимо определить малую постоянную времени контура скорости. Для этого примем:
![]()
Для определения передаточной функции нескорректированной системы необходимо записать передаточную функцию разомкнутого контура скорости без учета регулятора:
![]()
Тогда передаточная функция регулятора скорости будет иметь вид:
 ,
,
Регулятор скорости представлен в виде П-регулятора.
Тогда структурная схема всей системы будет выглядеть:
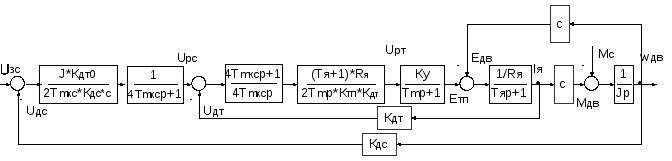
Рис.4.Структурная схема всей системы.
Воспользуемся математическим пакетом MATLAB и смоделируем динамические процессы в системе
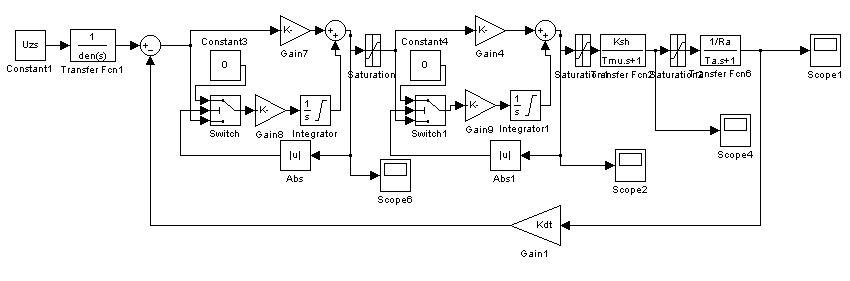
Рис.5.Модель контура тока.
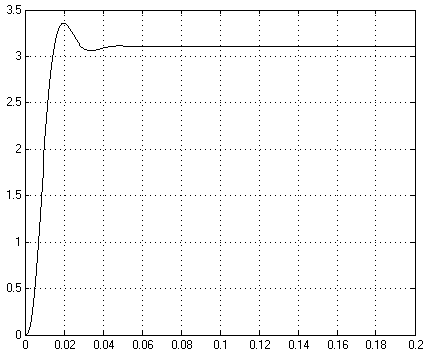
Рис.6. График изменения тока якоря ДПТ в контуре тока.
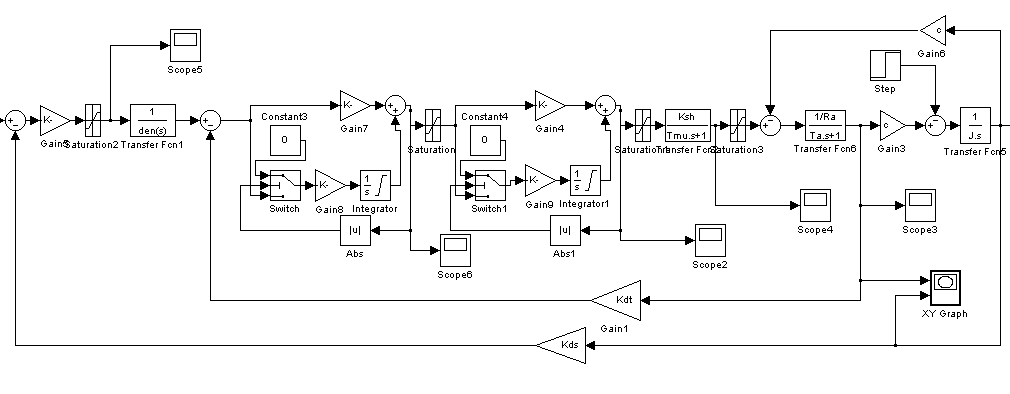
Рис.7.Модель контура скорости.
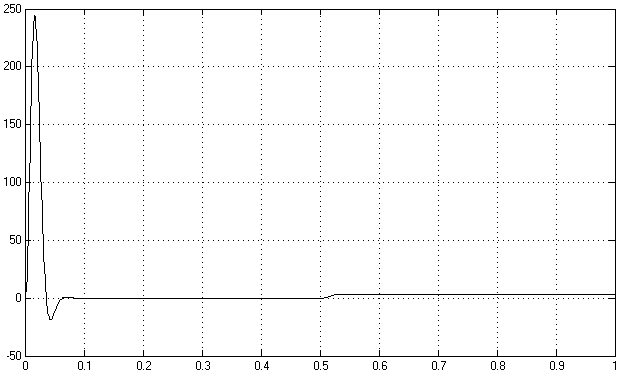
Рис.8. График изменения тока якоря ДПТ в контуре скорости.
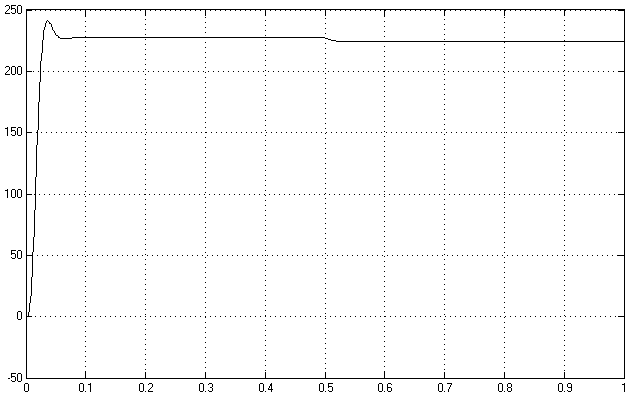
Рис.9. График изменения скорости в контуре скорости.

Рис.10. ДМХ в контуре скорости.
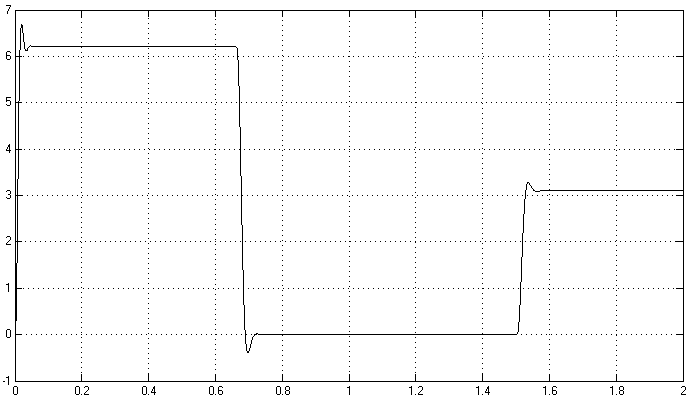
Рис.11. График изменения тока якоря ДПТ в системе с нелинейностями.
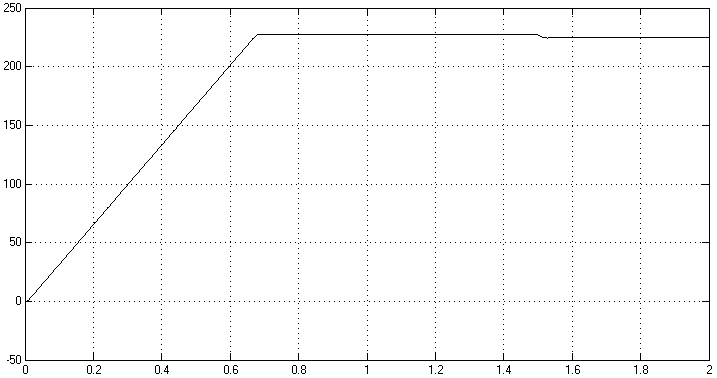
Рис.12. График изменения скорости в системе с нелинейностями.
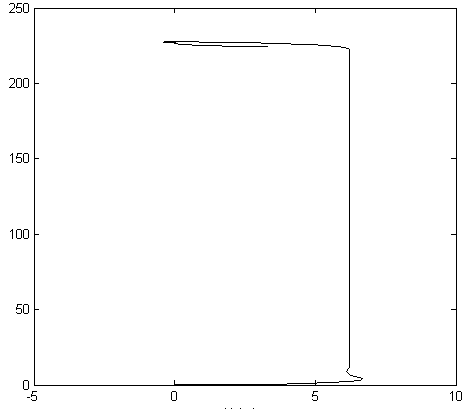
Рис.13. ДМХ в системе с нелинейностями.
Листинг m-файла:
Uzs=5
Ra=9.48
Ta=0.0083
Tmu=0.002
Tmuks=0.008
J=0.0064
c=0.35
Kds=0.022
Ksh=22
Kdt=1.61