

лаба6 / Лаба 6-2010
.docМинистерство образования Республики Беларусь
Министерство образования и науки Российской Федерации
Государственное учреждение высшего профессионального образования
Белорусско – Российский университет
Кафедра «Электропривод и автоматизация промышленных установок»
Курс «Системы управления электроприводами»
Отчет
по лабораторной работе № 6
«Исследование электропривода, построенного по системе широтно-импульсный преобразователь – двигатель постоянного тока»
Выполнили: ст. гр. АЭП-063
Белошейкин М.А.
Кучерявый А.В.
Николаев Н.А.
Проверил доцент:
Селиванов В.А.
Могилев,2010
Цель работы: изучение принципов построения широтно-импульсных преобразователей. Исследование статических и динамических характеристик системы ШИП-ДПТ.
Оборудование: лабораторный стенд, преобразователь, осциллограф, исследуемый двигатель, генератор постоянного тока (нагрузочная машина).
Сведения о лабораторной установке:
Лабораторная установка позволяет исследовать работу разомкнутой и замкнутой систем ШИП-ДПТ. Нагрузка на валу исследуемого двигателя Ml создается при помощи генератора G1 , якорь которого через выключатель SA2 соединяется с нагрузочным реостатом RP2 .Частота вращения машины Ml измеряется с помощью тахогенератора BR1 по прибору PV2. Ток в якоре машины Ml измеряется прибором РА1, а напряжение на якоре прибором PV3 , напряжение задания прибором PV1.

Рис.1 – Схема электрическая принципиальная лабораторного стенда.
Функциональная схема исследуемой статической системы стабилизации скорости вращения электромеханической системы "реверсивный широтно-импульсный преобразователь - двигатель постоянного тока независимого возбуждения" показана на рисунке:

Рисунок 2 - Функциональная схема системы "ШИП-ДПТ с НВ"
На рисунке 2 введены следующие обозначения:
РС - П-регулятор скорости;
РТ - ПИ-регулятор тока;
ШИП - реверсивный широтно-импульсный преобразователь;
ОЯ - обмотка эквивалентной якорной цепи ЭП;
ЭМЧ - электромагнитная часть ДПТ с НВ;
МЧ - механическая часть ЭП;
ДТ - датчик тока;
ДС - датчик скорости.
Сигналы в функциональной схеме соответствуют:
Uзс - напряжение задания скорости;
Uзт - напряжение задания тока;
Uу - напряжение управления на входе блока коммутации ШИП;
Uocc - напряжение отрицательной обратной связи по скорости;
Uocт - напряжение отрицательной обратной связи по току;
Eшип - ЭДС на выходе преобразователя;
Iя - ток якорной цепи;
М - момент двигателя;
w - угловая скорость вращения двигателя;
Е - противо-ЭДС двигателя;
Мс - момент сил статических сопротивлений.
Моделирование системы ШИП-ДПТ может производится с целью анализа энергетических, электрических и механических характеристик системы.
Расчет статических характеристик системы ШИП-ДПТ с использованием паспортных данных.
Исходные данные для расчета.


Рисунок 1 – Механическая характеристика ЭП
![]()
![]()

Рисунок 2 – Электромеханическая характеристика ЭП
Программная модель системы ШМП-ДПТ:

Рисунок 3 – Программная модель системы ШИП-ДПТ
Параметры двигателя:
P2ном,кВт 1.6 Rяэ, Ом 1.95
Тяэ, с 0.018 Iяном, А 8.5
Uяном, В 220 щном, с-1 157.1
С, В·с 1.334 Jпр,кг·м2 0.066
Параметры широтно-импульсного преобразователя:
Кшип 34.25 fшип, Гц 800
Параметры датчиков обратных связей:
Кдт, В/А 0.588 Кдс, В·с 0.064
Параметры системы управления:
Крт 0.086 Тирт, с 0.207 Крс 11.43
Назгрузочная диаграмма и режим работы:
Мс1, Н·м 5.0 Мс2, Н·м 10
t2, с 1.5 t2, с 2.0
Статические и динамические характеристики системы ШИП-ДПТ в замкнутом состоянии.

Рисунок 4 – График изменения тока двигателя.
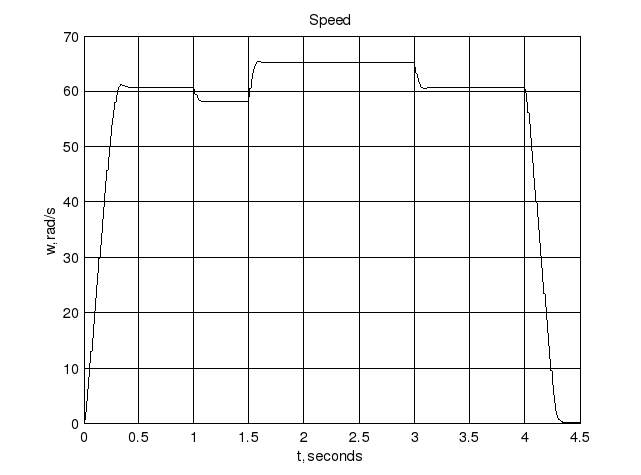
Рисунок 5 – График изменения скорости двигателя

Рисунок 6 – Динамическая механическая характеристика.
Статические и динамические характеристики системы ШИП-ДПТ в разомкнутом состоянии.

Рисунок 7 – График изменения тока двигателя.

Рисунок 8 – График изменения скорости двигателя